

3.2. Линейно зависимые и линейно независимые векторы. Базис
Линейная комбинация векторов. Пусть
даны векторы
![]() .
Тогда всякий вектор, имеющий вид
.
Тогда всякий вектор, имеющий вид
![]() ,
где
,
где![]() – некоторые числа, называется линейной
комбинацией векторов
или вектор
– некоторые числа, называется линейной
комбинацией векторов
или вектор
![]() линейно выражается через векторы
.
линейно выражается через векторы
.
Данные векторы называются линейно-зависимыми, если какой-либо из этих векторов линейно выражается через остальные, в противном случае – эти векторы линейно независимые.
Два вектора линейно зависимы тогда
и только тогда, если они коллинеарны
друг другу. Из определения умножения
вектора на число следует: если
![]() ,
то
,
то
![]() .
Наоборот, если два вектора параллельны,
то любой из них можно растянуть во
столько раз, чтобы получить другой.
.
Наоборот, если два вектора параллельны,
то любой из них можно растянуть во
столько раз, чтобы получить другой.
Три вектора линейно зависимы тогда и только тогда, когда они компланарны (параллельны одной плоскости).
Доказательство:
Пусть
![]() .
Отнесем все три вектора
к одному началу и проведем через
и
.
Отнесем все три вектора
к одному началу и проведем через
и
![]() плоскость (Р). Тогда векторы
плоскость (Р). Тогда векторы
![]() и
и
![]() будут лежать в плоскости Р и их сумма
– вектор
тоже будет лежать в плоскости Р.
Значит,
компланарны плоскости Р.
будут лежать в плоскости Р и их сумма
– вектор
тоже будет лежать в плоскости Р.
Значит,
компланарны плоскости Р.
Наоборот, пусть параллельны плоскости Р. Если их отнести к одному началу, то все они будут лежать в плоскости Р. Если не параллелен , то можно представить в виде линейной комбинации и . Это разложение вектора в плоскости по двум некомпланарным векторам.

![]()
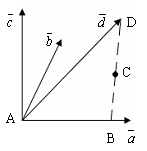
Четыре или более векторов всегда линейно зависимы.
Доказательство:
 Пусть
даны
Пусть
даны
![]() .
Отнесем их к одному началу. Если после
этого
лежат в одной плоскости, то они линейно
зависимы. Если
некомпланарны, то проведем через D
(конец
)
прямую, параллельно
до пересечения с плоскостью векторов
и
в точке С. Через С – прямую,
параллельную
.
Отнесем их к одному началу. Если после
этого
лежат в одной плоскости, то они линейно
зависимы. Если
некомпланарны, то проведем через D
(конец
)
прямую, параллельно
до пересечения с плоскостью векторов
и
в точке С. Через С – прямую,
параллельную
![]() до пересечения с прямой, на которой
лежит
до пересечения с прямой, на которой
лежит
![]() в точке В. Тогда
в точке В. Тогда
![]() – разложение вектора по трем
некомпланарным векторам (разложение
вектора по трем осям), что можно
осуществить единственным образом.
– разложение вектора по трем
некомпланарным векторам (разложение
вектора по трем осям), что можно
осуществить единственным образом.
Совокупность линейно независимых векторов, по которым производится разложение остальных векторов, называется базисом. В плоскости базисом могут служить два неколлинеарных вектора, в пространстве – три некомпланарных вектора.
Пусть
![]() –
базис,
–
произвольный вектор, тогда
–
базис,
–
произвольный вектор, тогда
![]() ,
где
,
где
![]() –координаты
вектора
в базисе векторов
.
–координаты
вектора
в базисе векторов
.
Обычно выбирают ортонормированный
базис, в котором векторы ортогональны
(перпендикулярны) и каждый вектор имеет
единичную длину. В этом случае базисные
векторы называют ортами и обозначают
![]() .
.
Декартовы координаты в пространстве
В качестве базиса декартовых координат
выбрали три вектора единичной длины
(орты), которые взаимно перпендикулярны
и отнесены к общему началу в точке О,
принятой за начало координат. Положение
произвольной точки М в пространстве
полностью характеризуется вектором
![]() ,
называемым радиус-вектором точки М.
,
называемым радиус-вектором точки М.
![]() ,
,
![]() -
декартовы координаты. Для любого вектора
-
декартовы координаты. Для любого вектора
![]() :
:
![]() ,
,
![]() -
проекции
на соответствующие оси.
-
проекции
на соответствующие оси.
Если
![]() ,
то
,
тогда
,
то
,
тогда
![]() ,
,
![]() ,
,
![]() ,
,
![]() – условие коллинеарности векторов.
– условие коллинеарности векторов.
Если
![]() ,
то
,
то
![]() или
или
![]() –
условие ортогональности векторов.
–
условие ортогональности векторов.
Направляющие косинусы вектора –
косинусы углов, которые он образует
с осями координат. Если
,
то
![]() ,
то есть
,
то есть
 ,
,
 ,
, .
.