

Функциональная схема фазовой системы чпу.
Функциональная схема фазовой системы ЧПУ
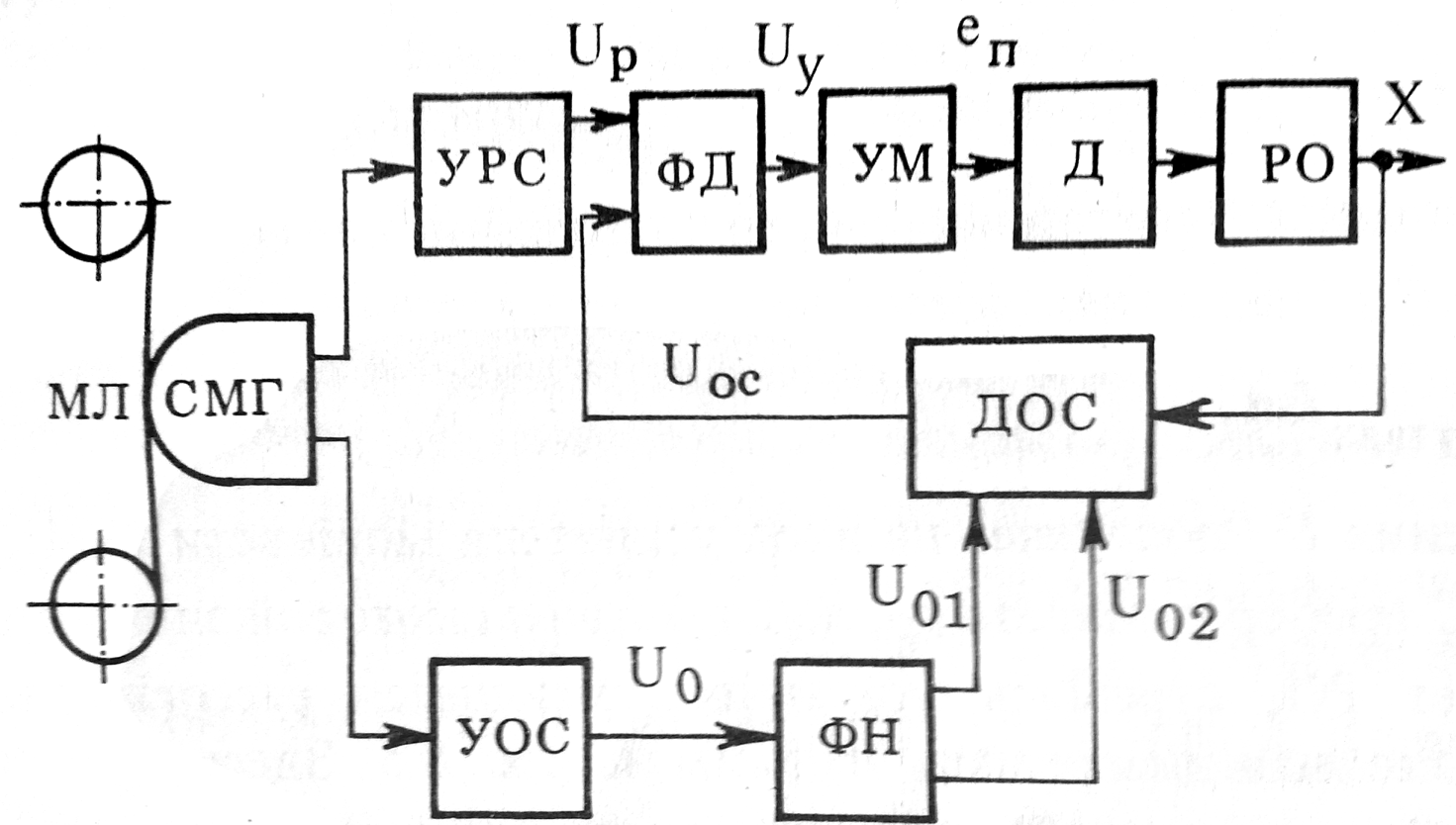
Для управления одной координаты на магнитном носителе используются 2-е дорожки. На одной записывается опорный сигнал:

На второй – рабочий:

Сигналы со считывающей магнитной головки СМГ усиливаются усилителями опорного УОС и рабочего УРС усилителями сигнала.
Величина и направление перемещения РО задаются фазой рабочего сигнала.
При
постоянном задании
 РО
перемещается в положение, соответствующее
повороту ротора двигателя на угол
РО
перемещается в положение, соответствующее
повороту ротора двигателя на угол
 .
.
Датчик ОС (ДОС) выполняется в виде вращающегося трансформатора на первичной обмотке которого через формирователь напряжения (ФН) поступают U01иU02 сдвинутые относительно друг друга на 90о
Во
вращающемся трансформаторе создается
вращ. с частотой
магнитное поле, образующее на выходе
датчика Uос. Начальная
фаза которого зависит от положения
ротора.

Напряжение задания Uр и Uос поступают на вход фазового дискриминатора (ФД) которое в 1-м приближении можно рассматривать как устройство умножения, которое при малом рассогласовании фактически определяет
 ,
т.е.
,
т.е.
Сигнал
управления
 поступает на вход усилителя мощности
(УМ)
поступает на вход усилителя мощности
(УМ)
Ф ормирователь напряжения фазовой системы чпу.
Zн – сопротивление нагрузки первичной обмотки вращ. трансформатора.
Подбором сопротивления R1 и R2 и емкостей С1 и С2 можно менять величину сдвига между выходными U01 и U02. На диаграмме i1R1, i2R2, i1Xc1, i2Xc2 падение напряжения в активных и емкостных сопротивлениях. Векторная диаграмма построена при условии пренебрежения токами нагр. сопр. Zн
Фазовый дискриминатор (балансный) фазовой системы чпу.
Рабочее напряж. 2Uф снимается со вторичной обмотки трансформатора имеющую выведенную нулевую точку. А Д1, Д2 образуют 2 симетрич. однополупериодные схемы выпрямителя нагрузки Rн1,Rн2. Выходное напряжение Uвых представляет собой разность падений напряжений на сопротивлении Rн1,Rн2.
В диагональ схемы АБ включ. вторичная обмотка опорного трансформатора Тр2 с напряжением U0. Диоды Д1 и Д2 открыты соответственно:


 Конденсаторы
С1, С2 является фильтрами поддерж.
напряжение в части периода когда Д1 и
Д2 закрыты.
Конденсаторы
С1, С2 является фильтрами поддерж.
напряжение в части периода когда Д1 и
Д2 закрыты.
Функциональная схема импульсно-фазовой системы чпу.
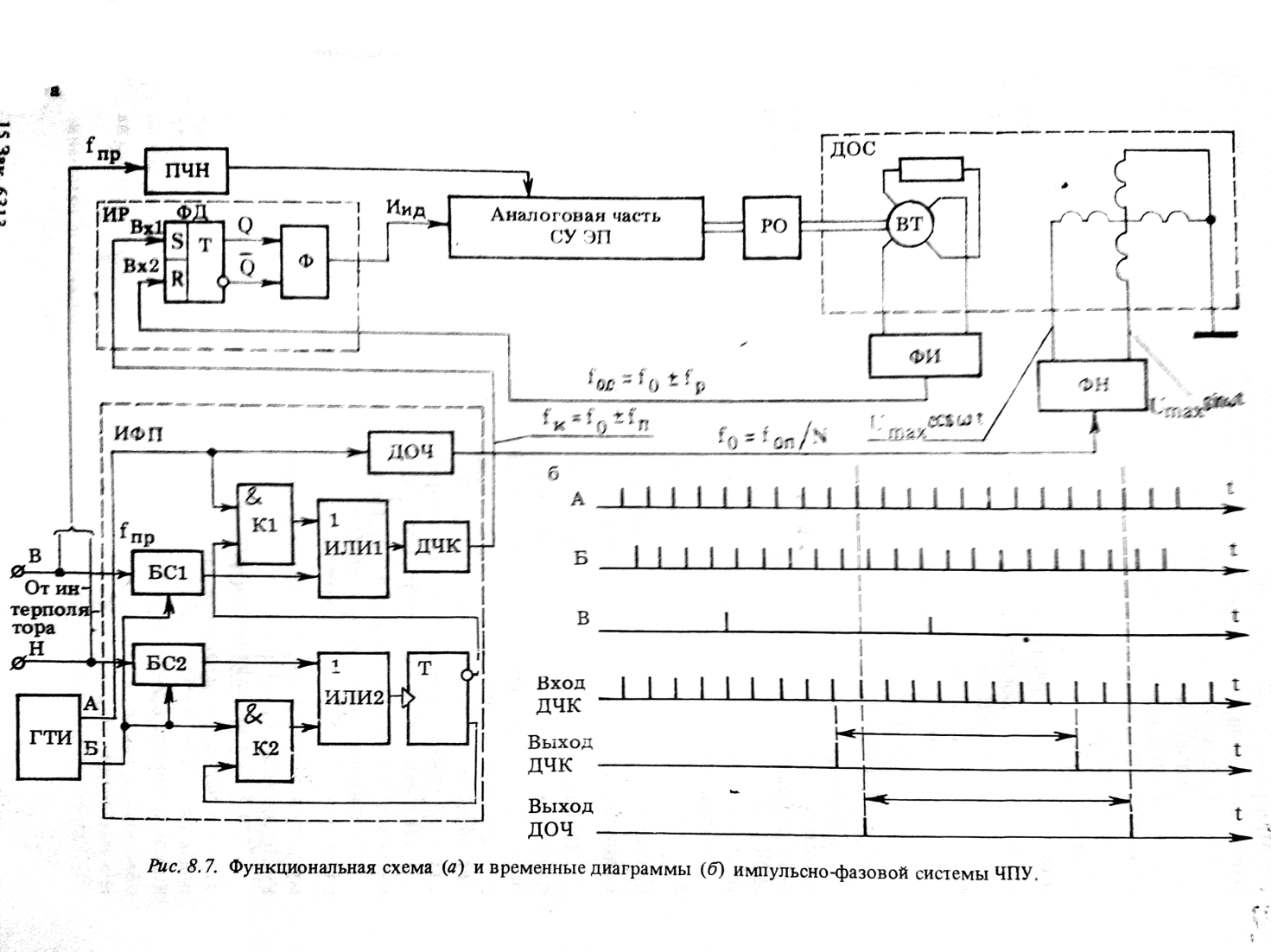
Основными элементами схемы является ГТИ, импульсно-фазовый преобразователь, измеритель рассогласования ИР, аналоговая часть системы управления ЭП, РО, ДОС с вращающийся трансформатор и формирователь импульсов ФИ. Формирователь напряжения ФН для питания первичной обмотки вращ. трансформатора, ПЧН – преобразователь частота - напряжение
ГТИ вырабатывает два последовательных импульса А и В с частотой сдвинуты относительно друг друга на на 0.5
Опорная частота значительно больше частоты след. импульсов программы ФПР, получающих от интерполятора по входам В или Н.
ИФП содержит блоки синхронизации БС1, БС2 на входы которых поступают импульсы программы и тактовые импульсы серии В с помощью делителя опорной частоты ДОЧ и делителя частоты координаты ДЧК.
----- образ сигнала с частотой fк и fо, где Nкоэф. деления делителей ДОЧ и ДЧК. При движении вперед импульсы программы с частотой fпр поступают ко входу В при этом триггер Т со счетным входом находится в положении 0. На его инверсном выходе имеется сигнал логическая 1.
Посредством чего ключ К1 открыт и импульсы серии А приходят на схему ИЛИ 1 и затем на вход ДЧК. Импульс программы поступает на вход БС1синхр. Импульсы серии Б т.е. на выходе БС1 импульс программы появится со сдвигом во времени одновременно с ближайшим послед.импульсом серии В. Этот импульс так же проходит через схему ИЛИ 1 на вход ДЧК в результате на выходе ДЧК образуется сигнал задания программы
Программный импульс «назад» появится одновременно с ближайшим импульсом серииВ на выходе БС2 и затем через схему 1или 2 на счетном входе триггера Т. Триггер перейдет в единичное состояние ключ К1 закроется и очередной импульс серии Анедоходит до ДЧК. Одновременно отпирается лючК2 и послед. импульс серииВ устанавливает триггер в 0-е состояние. Таким образом, при движении назад на выходе ДЧК появится сигнал с частотой .
Импульс сигнала с ДОЧпоступает на ФН преобразующий входной сигнал в напряжение и , где . Эти напряжения подводятся к обмлткам возбуждения вращ. трансформатора в котором создается магнитное поле, вращающееся с частотой . Поле создает в обмотках ротора ЭДС, фазы которой зависят от положения ротора. Формирователь импульсов преобраз. ЭДС ротора в сигнал с частотой , где - частота, зависящая от скорости вращения ротора .
При нормальной работе привода частота .
Сигнал задания координаты Uзк с выхода ДЧКи сигнал обр. связи Uосс выхода формирователя импульсов поступает на входы измер. рассогласования, состоящего фазового дискриминатора ФДи фильтра Ф. Сигналы Uзки Uос не является синусоидальным, а представляет собой последовательность прямоугольных импульсов.
В периоды Тк иТосвследствии достаточно большого коэф. деления NДЧ мало отличается от периода сигнала получаемого с выхода ДОЧ. Если принять что периоду Тксигнала задания координаты соотв. фазовый угол , то интервалы между появлением имп. Uзк и ближайшему импульсу Uос будет соответствовать некоторый фазовый угол .
Фазовый дискриминатор представляет собой РС триггер котор. преобразует импульсные сигналы в ступенчатые сигналы и на выходах триггера напряж. триггера Uт равное поступает на вход фильтра Ф образ.напряжение на выходе измер. расслгласованияUир=0 и это соответствует заданному положению рабочего органа. Напряжение рассогласования подается на вход аналоговой части привода (регулятор напряжения). При рассоглас. знак напряженияUир меняется на противоположный и вместо ускорения РО подается сигнал на его замедление.