

Матрица поворота в двумерном пространстве
В
двумерном пространстве поворот можно
описать одним углом
![]() со
следующей матрицей линейного
преобразования
в декартовой
системе координат:
со
следующей матрицей линейного
преобразования
в декартовой
системе координат:
![]()
Поворот выполняется путём умножения матрицы поворота на вектор-столбец, описывающий вращаемую точку:
![]() .
.
Координаты (x',y') в результате поворота точки (x,y) имеют вид:
![]() ,
,
![]() .
.
Положительным углам при этом соответствует вращение вектора против часовой стрелки в обычной, правосторонней системе координат, и по часовой стрелке в левосторонней системе координат.
[Править] Матрица поворота в трёхмерном пространстве
Матрицами вращения вокруг оси декартовой системы координат на угол α в трёхмерном пространстве являются:
Вращение вокруг оси x:
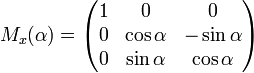 ,
,
Вращение вокруг оси y:
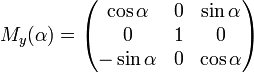 ,
,
Вращение вокруг оси z:
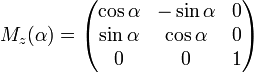 .
.
Положительным углам при этом соответствует вращение вектора против часовой стрелки в правой системе координат, и по часовой стрелке в левой системе координат, если смотреть на плоскость вращении со стороны полупространства, где значения координат оси, вокруг которой осуществляется поворот, положительные. Правая система координат связана с выбором правого базиса (см. правило буравчика).
Свойства матрицы поворота.
Свойства матрицы поворота
Если
![]() —
матрица, задающая поворот вокруг оси
—
матрица, задающая поворот вокруг оси
![]() на
угол ϕ,
то:
на
угол ϕ,
то:




 (след
матрицы
вращения)
(след
матрицы
вращения) (матрица
имеет единичный определитель).
(матрица
имеет единичный определитель).если строки (или столбцы матрицы) рассматривать как координаты векторов
 ,
то верны следующие соотношения):
,
то верны следующие соотношения):
Матрица обратного поворота получается обычным транспонированием матрицы прямого поворота, т. о.
 .
.
Алгоритм Брезенхема для растеризации отрезка.
Алгоритм Брезенхе́ма (англ. Bresenham's line algorithm) — это алгоритм, определяющий, какие точки двумерного растра нужно закрасить, чтобы получить близкое приближение прямой линии между двумя заданными точками. Это один из старейших алгоритмов в машинной графике — он был разработан Джеком Е. Брезенхэмом (Jack E. Bresenham) в компании IBM в 1962 году. Алгоритм широко используется, в частности, для рисования линий на экране компьютера. Существует обобщение алгоритма Брезенхэма для построения кривых 2-го порядка.
Алгоритм
Отрезок проводится между двумя точками — (x0,y0) и (x1,y1), где в этих парах указаны колонка и строка, соответственно, номера которых растут вправо и вниз. Сначала мы будем предполагать, что наша линия идёт вниз и вправо, причём горизонтальное расстояние x1 − x0 превосходит вертикальное y1 − y0, т.е. наклон линии от горизонтали — менее 45°. Наша цель состоит в том, чтобы для каждой колонки x между x0 и x1, определить, какая строка y ближе всего к линии, и нарисовать точку (x,y).
Общая формула линии между двумя точками:
![]()
Поскольку мы знаем колонку x, то строка y получается округлением к целому следующего значения:
![]()
Однако, вычислять точное значение этого выражения нет необходимости. Достаточно заметить, что y растёт от y0 и за каждый шаг мы добавляем к x единицу и добавляем к y значение наклона
![]()
которое можно вычислить заранее. Более того, на каждом шаге мы делаем одно из двух: либо сохраняем тот же y, либо увеличиваем его на 1.
Что из этих двух выбрать — можно решить, отслеживая значение ошибки, которое означает — вертикальное расстояние между текущим значением y и точным значением y для текущего x. Всякий раз, когда мы увеличиваем x, мы увеличиваем значение ошибки на величину наклона s, приведённую выше. Если ошибка превысила 0.5, линия стала ближе к следующему y, поэтому мы увеличиваем y на единицу, одновременно уменьшая значение ошибки на 1. В реализации алгоритма, приведённой ниже, plot(x,y) рисует точку, а abs возвращает абсолютную величину числа:
function line(x0, x1, y0, y1)
int deltax := abs(x1 - x0)
int deltay := abs(y1 - y0)
real error := 0
real deltaerr := deltay / deltax
int y := y0
for x from x0 to x1
plot(x,y)
error := error + deltaerr
if error >= 0.5
y := y + 1
error := error - 1.0
Проблема такого подхода — в том, что с вещественными величинами, такими как error и deltaerr, компьютеры работают относительно медленно. Кроме того, при вычислениях с плавающей точкой может накапливаться ошибка. По этим причинам, лучше работать только с целыми числами. Это можно сделать, если умножить все используемые вещественные величины на deltax. Единственная проблема — с константой 0.5 — но в данном случае достаточно умножить обе части неравенства на 2. Получаем следующий код:
function line(x0, x1, y0, y1)
int deltax := abs(x1 - x0)
int deltay := abs(y1 - y0)
int error := 0
int deltaerr := deltay
int y := y0
for x from x0 to x1
plot(x,y)
error := error + deltaerr
if 2 * error >= deltax
y := y + 1
error := error - deltax
Умножение на 2 для целых чисел реализуется битовым сдвигом влево.
Теперь мы можем быстро рисовать линии, направленные вправо-вниз с величиной наклона меньше 1. Осталось распространить алгоритм на рисование во всех направлениях. Это достигается за счёт зеркальных отражений, т.е. заменой знака (шаг в 1 заменяется на -1), обменом переменных x и y, обменом координат начала отрезка с координатами конца.