

11.3 Исследование работы системы апч
в статическом режиме
Рассмотрим особенности анализа статического режима АПЧ по промежуточной частоте fп.
Основная характеристика системы АПЧ – регулировочная.
П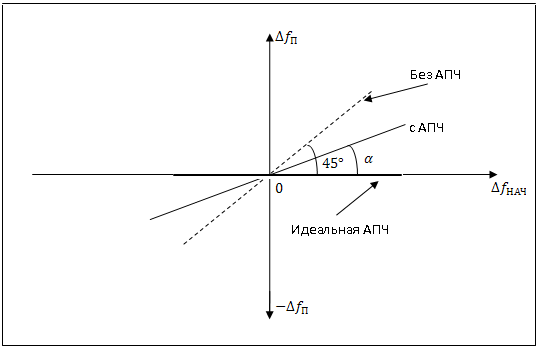 ри
небольших расстройках по частоте
регулировочная характеристика выглядит
следующим образом:
ри
небольших расстройках по частоте
регулировочная характеристика выглядит
следующим образом:
Угол наклона регулировочной характеристики АПЧ определяется выражением:

где: КАПЧ = SЧД Sр
Используя графоаналитический метод, можно построить регулировочную характеристику системы АПЧ при больших частотных расстройках.
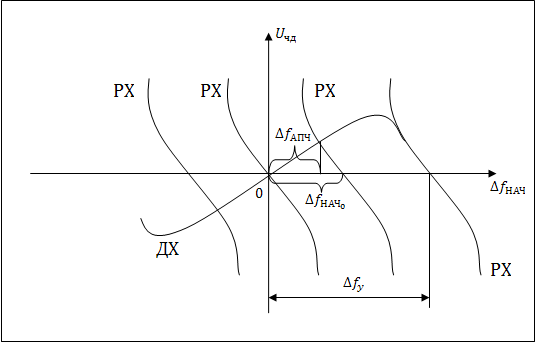
Полоса частот, в пределах которой осуществляется стабильная работа системы АПЧ, называется полосой удержания - ∆fy.
Величина полосы удержания системы АПЧ определяется следующим образом:
∆fy = ∆fЧД (1+КАПЧ).
В случае, если характеристика дискриминатора имеет две точки перегиба, где производная меняет знак, то получается две точки касания характеристики управителя детекторной характеристики:

Точка А пересечения ДХ и РХ дает устойчивую точку работы системы АПЧ и обеспечивает подстройку частоты до величины ∆fА. Точки Б и Б’ являются точками внешней и внутренней касательной РХ к ДХ и определяют значения полосы удержания ∆fy и втягивания ∆fв. В пределах частоты ∆fв гарантируется работа нашей АПЧ.
Таким образом, используя эти графики с помощью графоаналитического метода можно построить регулировочную характеристику АПЧ в целом:

Интервал частот, в пределах которого АПЧ начинает эффективно работать называется полосой захвата (втягивания) - ∆fв.
При этом, если форма скатов ДХ имеет вид 1, то ∆fy = ∆fв. Во втором случае всегда: ∆fy > ∆fв
11.4. Исследование работы системы апч
в динамическом режиме (ДР)
При анализе ДР системы АПЧ оценивается:
- быстродействие работы системы,
- ошибка работы системы (например, чем меньше угол a, тем меньше ошибка),
- устойчивость работы системы.
Для облегчения анализа предположим, что:
1) Инерционность всей системы АПЧ определяется только фильтром, который представляет собой однозвенный RC-фильтр с постоянной времени: τф.
2) Детекторная характеристика и характеристика управителя аппроксимируются линейными функциями.
В результате ДУ, которое связывает входной и выходной сигнал фильтра, можно записать в виде:
 где
где
 (1)
(1)
fп = fпн – SрUp + ∆fп , (2)
где: fпн - начальная нестабильность.
Выражение (2) - представляет собой регулировочную характеристику устройства управления.
fп - fпн = ∆fпАПЧ = SрUp+∆fг - ∆fc - номинальная разность.
∆fг = fг – fгнач;
∆fс = fс - fснач.
В результате дифференциальное уравнение системы АПЧ запишется в виде:

 ;
∆fнач =
∆fг -
∆fc
;
∆fнач =
∆fг -
∆fc

То есть начальная расстройка ∆fнач от времени не зависит, следовательно, решение уравнения можно записать в виде:

где: Ауст
– установившееся значение:
 ;
;
КАПЧ = SЧД Sр;


В результате переходная характеристика системы АПЧ будет выглядеть следующим образом:
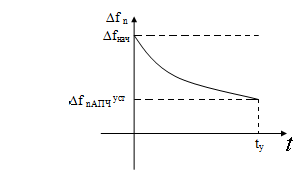
Время установления переходного процесса:
ty = 2,3τАПЧ (1+0,435ln КАПЧ)
Допустимая постоянная времени ФНЧ τф зависит от типа модуляции ПРМ. В ПРМ ЧМ сигналов τф выбирают, исходя из нижней частоты спектра сообщения Ωmin.
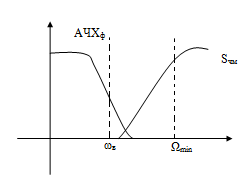
Т.е. результирующая полоса АПЧ не должна перекрывать сам частотно-модулированный сигнал.
 ,
ωд <<
ωв <<
Ωmin,
,
ωд <<
ωв <<
Ωmin,
где: ωд – частота дестабилизирующих факторов, влияющих на уход частоты.
В ПРМ импульсных сигналов τф >>TП – периода следования импульсов.