

Физика колебаний и волн
Тема 4. Механические колебания
Лекция 4. Механические колебания. Волны
4.1. Гармонические колебания. Дифференциальное уравнение собственных гармонических колебаний материальной точки
Движения и циклические процессы, характеризуемые определенной повторяемостью во времени, называют колебаниями. Они чрезвычайно распространены в природе и технике. Это суточные и годичные изменения температуры, морские приливы и отливы, волны на поверхности морей и океанов, разрушительные колебания коры планеты, биение сердца, дыхательный ритм, вибрации механизмов и сооружений (амплитуда колебаний вершины Останкинской телебашни при сильном ветре достигает 2,5 м), движение поршней двигателей внутреннего сгорания, акустические процессы, тепловое движение ионов и атомов кристаллической решетки твердого тела и движение электронов в атоме, переменный ток и его электромагнитное поле. В ряде случаев колебания играют отрицательную роль. Это колебания (вибрации) крыльев самолета; моста, возникающие из-за толчков на стыках рельс, при прохождении поезда; корпуса корабля, вызванные вращением гребного винта и т.п. Все эти процессы могут привести к катастрофическим последствиям. В подобных случаях необходимо воспрепятствовать тому, чтобы колебания достигли опасных размеров. Вместе с тем колебательные процессы составляют основу некоторых, технических устройств и даже отраслей техники. Так, радиотехника основана на колебательных процессах.
В зависимости от характера воздействия, вызывающего и поддерживающего колебательный процесс, колебания классифицируют на свободные (или собственные), вынужденные, автоколебания и параметрические.
Свободные или собственные колебания происходят в системе, предоставленной самой себе после того, как ей был сообщен толчок или она была выведена из положения равновесия. Примером собственных колебаний является движение подвешенного на нити шарика.
Вынужденные колебания появляются в системе от воздействия внешней периодически изменяющейся силы. Примером вынужденных колебаний может служить колебание моста, возникающее при прохождении по нему шагающих в ногу людей.
Автоколебания, как и вынужденные колебания, сопровождаются воздействием на систему внешних сил, но при этом система сама управляет внешним воздействием. Примером автоколебательной системы являются часы. В них маятник получает толчки за счет энергии поднятой гири или упругой пружины. Однако толчки происходят в те моменты времени, когда маятник проходит через среднее положение.
Параметрические колебания в системе происходят также от внешнего воздействия при периодическом изменении одного из параметров системы. Примером параметрических колебаний является движение шарика, подвешенного на нити переменной длины.
Ф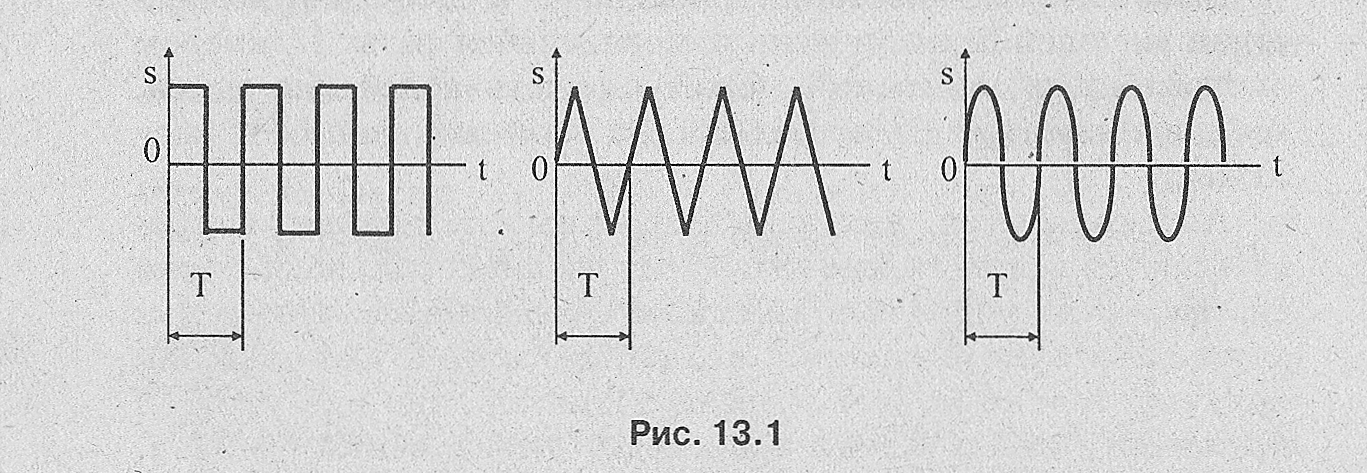 изическая
природа колебаний может быть разной, и
поэтому колебательные системы принято
классифицировать на механические,
электрические, информационные,
биологические и др. Особое значение,
имеют колебания двух видов: механические
и электромагнитные. К механическим
относят колебания маятников, струн,
вибрации различных механизмов и
сооружений, а также акустические
колебания, волны на поверхности водоемов
и др. К электромагнитным — колебания
тока в электрической цепи, колебания
напряженности электрического и магнитного
полей в электромагнитной волне. По форме
колебания могут быть разделены на
прямоугольные, треугольные и синусоидальные
(рис. 13.1).
изическая
природа колебаний может быть разной, и
поэтому колебательные системы принято
классифицировать на механические,
электрические, информационные,
биологические и др. Особое значение,
имеют колебания двух видов: механические
и электромагнитные. К механическим
относят колебания маятников, струн,
вибрации различных механизмов и
сооружений, а также акустические
колебания, волны на поверхности водоемов
и др. К электромагнитным — колебания
тока в электрической цепи, колебания
напряженности электрического и магнитного
полей в электромагнитной волне. По форме
колебания могут быть разделены на
прямоугольные, треугольные и синусоидальные
(рис. 13.1).
Опыт указывает на многообразие форм колебательного движения и на то, что анализ их осуществляется единым методом. Простейшими являются гармонические колебания, при которых колеблющаяся величина изменяется со временем по закону косинуса — синуса. Большая часть реальных колебаний близка к гармоническим, и в ряде случаев подобные колебания идеализируются и считаются гармоническими. Важным является и то обстоятельство, что периодические процессы иной негармонической формы могут быть представлены как наложение нескольких гармонических колебаний. Теория гармонических колебаний используется буквально во всех разделах физики: в теории упругости, акустике, оптике, электричестве и электромагнетизме, учении об атоме и др.
О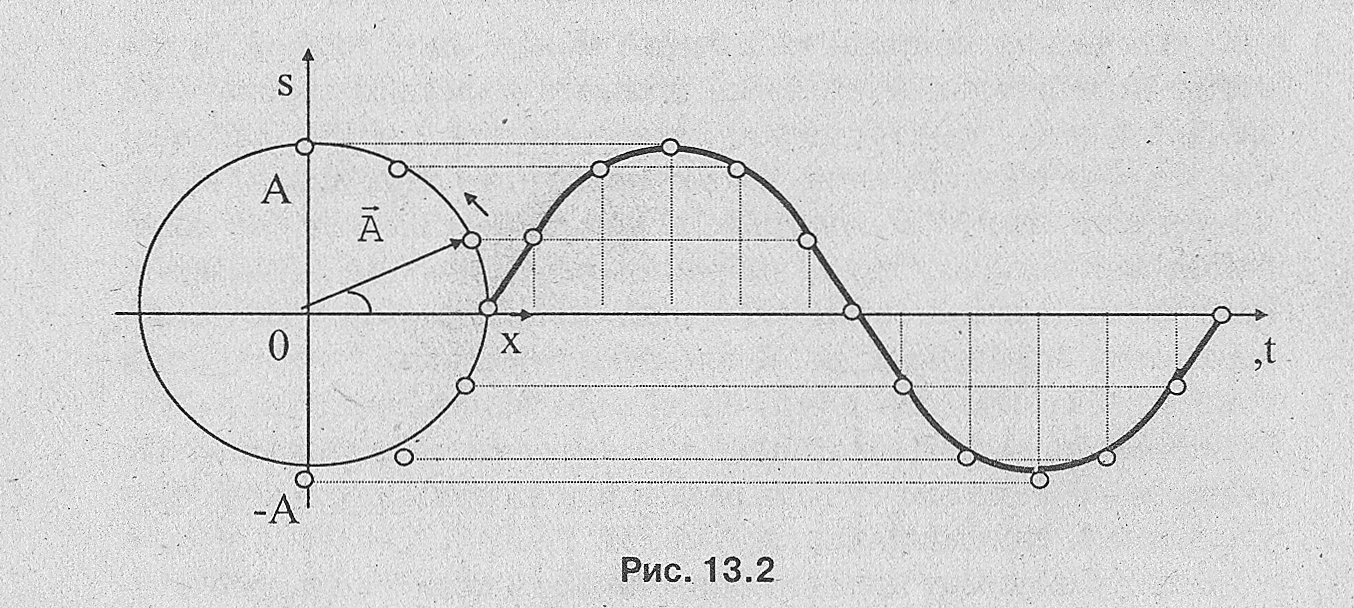 дним
из методов графического изображения
гармонического колебания является
метод вращающегося вектора амплитуды
(рис. 13.2), называемый также методом
векторных диаграмм. Для этого из точки
О,
взятой
на оси х,
под
углом
откладывается вектор
дним
из методов графического изображения
гармонического колебания является
метод вращающегося вектора амплитуды
(рис. 13.2), называемый также методом
векторных диаграмм. Для этого из точки
О,
взятой
на оси х,
под
углом
откладывается вектор![]() ,
модуль
которого равен амплитуде А
рассматриваемого
колебания. Пусть вектор
движется
против часовой стрелки с угловой
скоростью
,
модуль
которого равен амплитуде А
рассматриваемого
колебания. Пусть вектор
движется
против часовой стрелки с угловой
скоростью
![]() = const.
Проекция
конца вектора на ось х
или
s
будет
перемещаться вдоль оси и принимать
значения от +А
до
-А.
Отклонение
колеблющейся величины х
со
временем определяется соотношением
x=Acos
,
а применительно к оси s
— s
= Asin
.
На этом же рисунке дано графическое
построение синусоиды. Итак, гармоническое
колебание может быть представлено
проекцией вектора амплитуды
на
произвольно выбранную ось. Именно такое
изображение гармонического колебательного
процесса воспроизводится регистрирующими
приборами.
= const.
Проекция
конца вектора на ось х
или
s
будет
перемещаться вдоль оси и принимать
значения от +А
до
-А.
Отклонение
колеблющейся величины х
со
временем определяется соотношением
x=Acos
,
а применительно к оси s
— s
= Asin
.
На этом же рисунке дано графическое
построение синусоиды. Итак, гармоническое
колебание может быть представлено
проекцией вектора амплитуды
на
произвольно выбранную ось. Именно такое
изображение гармонического колебательного
процесса воспроизводится регистрирующими
приборами.
Рассмотрим основные кинематические параметры гармонических колебаний.
1. Отклонение (смещение s = f(t)) — мгновенное вертикальное перемещение относительно положения равновесия, м.
2. Амплитуда
А
— максимальное
отклонение (смещение),м. Большинство
реальных колебательных процессов не
являются строго периодическими. И в
связи с этим и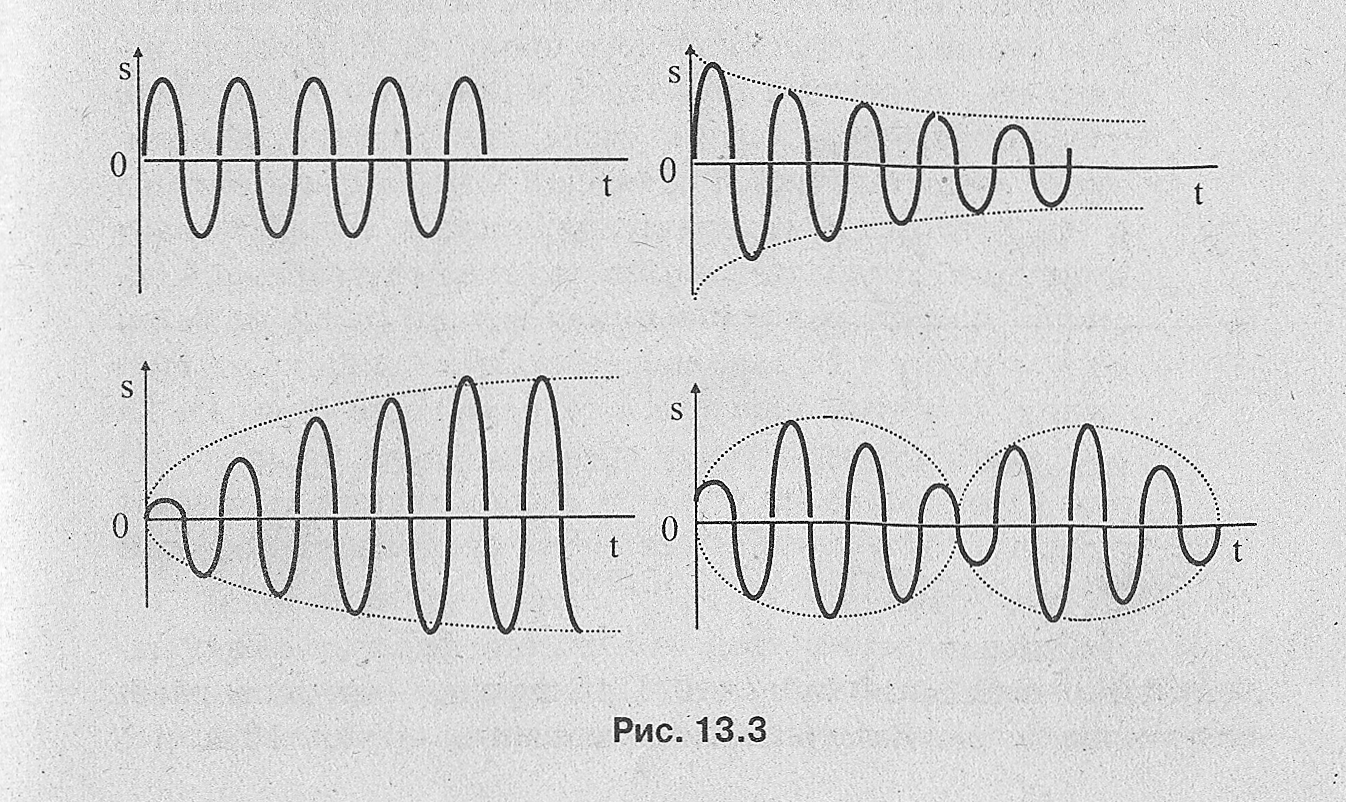 зменение
амплитуды позволяет выделить незатухающие,
затухающие, нарастающие и
амплитудно-модулированные колебания
(рис. 13.3). Последний тип колебательного
движения, в котором амплитуда периодически
изменяется, называется биениями.
зменение
амплитуды позволяет выделить незатухающие,
затухающие, нарастающие и
амплитудно-модулированные колебания
(рис. 13.3). Последний тип колебательного
движения, в котором амплитуда периодически
изменяется, называется биениями.
Периодичность, то есть повторяемость движения по истечении времени Т, называемая периодом колебания. Это минимальный промежуток времени, через который происходит повторение процесса. Итак, период Т = 1/
 ,
с, есть
длительность полного колебания, то
есть промежуток времени, в течение
которого фаза колебания получает
приращение 2р рад.
,
с, есть
длительность полного колебания, то
есть промежуток времени, в течение
которого фаза колебания получает
приращение 2р рад.Число колебаний к моменту времени t равно п = t/T. Количество повторений процесса п в течение времени t называют частотой, в данном случае. колебательного процесса, = n/t, с-1. Следовательно, частота колебаний = 1/Т, с-1= Гц, представляет собой число колебаний в единицу времени. В качестве единицы измерения частоты в СИ используется герц. 1 Гц соответствует одному колебанию в секунду.
Угловая, круговая или циклическая частота, называемая прежде угловой скоростью,
 .
Так как со
.
Так как со
 ,
то
,
то
 ,
рад/с.
Заметим, что Т
=
,
рад/с.
Заметим, что Т
=
 .
Циклическая
частота равна величине изменения фазы
в единицу времени, то есть скорости
изменения фазы.
.
Циклическая
частота равна величине изменения фазы
в единицу времени, то есть скорости
изменения фазы.Фаза
 ,
рад — термин греческого происхождения
и в переводе на русский язык означает
«проявление». В физике это следует
понимать как конкретную в фиксированный
момент времени стадию развития
периодического процесса. Например:
начало его, максимум развития, минимум
и т.д. Однако изложенного определения
фазы, как физической величины,
недостаточно. Физический смысл фазы
состоит в том, что она определяет
смещение в любой момент времени и,
следовательно, состояние колебательной
системы. Фазам, различающимся между
собой на величину, кратную 2я рад,
соответствуют одинаковые смещения.
Отметим еще раз, что изменение фазы на
2
,
рад — термин греческого происхождения
и в переводе на русский язык означает
«проявление». В физике это следует
понимать как конкретную в фиксированный
момент времени стадию развития
периодического процесса. Например:
начало его, максимум развития, минимум
и т.д. Однако изложенного определения
фазы, как физической величины,
недостаточно. Физический смысл фазы
состоит в том, что она определяет
смещение в любой момент времени и,
следовательно, состояние колебательной
системы. Фазам, различающимся между
собой на величину, кратную 2я рад,
соответствуют одинаковые смещения.
Отметим еще раз, что изменение фазы на
2 рад
соответствует отрезку времени в один
период Т. И еще один нюанс из области
воспоминаний. Пересчет радиан в градусы
осуществляется следующим образом:
рад
соответствует отрезку времени в один
период Т. И еще один нюанс из области
воспоминаний. Пересчет радиан в градусы
осуществляется следующим образом:
 =
= 57,3°.
57,3°.Начальная фаза
 ,
рад — значение фазы в момент начала
колебаний при t
= 0.
При определении фазы необходимо
учитывать начальную фазу
-
рис. 13.4.
,
рад — значение фазы в момент начала
колебаний при t
= 0.
При определении фазы необходимо
учитывать начальную фазу
-
рис. 13.4.
8 .
Время t
—
отсчитывается от момента начала
колебаний. Колебания, и в том числе
гармонические, представляют собой
движение с переменным ускорением.
Отклонение, скорость и ускорение являются
функцией времени.
.
Время t
—
отсчитывается от момента начала
колебаний. Колебания, и в том числе
гармонические, представляют собой
движение с переменным ускорением.
Отклонение, скорость и ускорение являются
функцией времени.
Для
гармонического, например, движения
системы по. окружности, описываемого
уравнением типа s
= Асоs
= Acos(![]() ),
первая производная по времени представляет
собой мгновенную скорость колеблющейся
системы
),
первая производная по времени представляет
собой мгновенную скорость колеблющейся
системы
![]() (13.1)
(13.1)
В ыше
было отмечено, что гармоническое
колебание представляет собой движение
с переменным ускорением. Мгновенное
ускорение колебательной системы
определяется второй производной s
= Асоs
по времени
ыше
было отмечено, что гармоническое
колебание представляет собой движение
с переменным ускорением. Мгновенное
ускорение колебательной системы
определяется второй производной s
= Асоs
по времени
![]() (13.2)
(13.2)
Предположение
о периодическом гармоническом изменении
скорости и ускорения во времени наглядно
подтверждается уравнениями 13.1 и 13.2 и
очевидно из рис. 13.5. Фазы скорости и
ускорения отличаются от фазы s
= Асоs
соответственно на
/2
и
.
Поэтому скорость и ускорение достигают
своих амплитудных значений
![]() и
и
![]() соответственно в моменты времени, когда
s
= 0 и s
= ±А. Знак ускорения всегда противоположен
знаку смещения, то есть ускорение
центростремительно.
соответственно в моменты времени, когда
s
= 0 и s
= ±А. Знак ускорения всегда противоположен
знаку смещения, то есть ускорение
центростремительно.
Из уравнения 13.2 следует дифференциальное уравнение гармонических колебаний
![]() .
(13.3)
.
(13.3)
Решением
этого уравнения является s
= Acos(![]() .
.
4.2. Энергия гармонического колебания
Энергия системы, колеблющейся без затухания, постоянна. Она складывается из кинетической Ек и потенциальной ЕП составляющих. Значения обеих компонент энергии меняются периодически, но в каждый момент времени Е = Ек + ЕП. Рассмотрим гармоническое колебание материальной точки массой m вдоль оси х относительно начала координат, как центра равновесия (рис. 13.6).
Р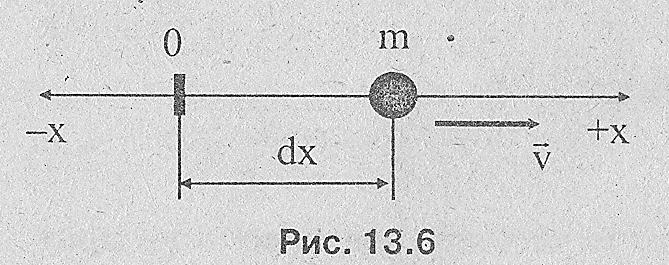 ассмотрим
кинетическую составляющую энергии
колебательного движения. Согласно общей
формуле Ек=
0,5
ассмотрим
кинетическую составляющую энергии
колебательного движения. Согласно общей
формуле Ек=
0,5![]() и формуле (13.1) имеем
и формуле (13.1) имеем
![]()
Поскольку sin2а = 0,5(1 — cos2а), то окончательно получим
![]() ,
Дж. (13.4)
,
Дж. (13.4)
Рассмотрим потенциальную составляющую энергии материальной точки, колеблющейся под действием силы F = та. Колебательное движение рассматриваемой системы является гармоническим и описывается, как известно из п. 5.1, дифференциальным уравнением (13.3) d2x/dt2 = - 2х = ах, м/с2. С учетом изложенного
EП
= -
![]() dx
= -
dx
= -![]() =
=![]() .
.
Поскольку cos2a = 0,5 (1 + cos2a), то окончательно получим
![]() ,
Дж. (13.5)
,
Дж. (13.5)
Знак «минус» означает противоположный характер изменения ЕП и вектора ускорения.
Сложив (13.4) и (13.5), получим формулу для энергии (полной) гармонического колебания
Е=Ек+ЕП=![]() ,
Дж. (13.6)
,
Дж. (13.6)
Итак, энергия гармонически колеблющейся материальной точки, как уже отмечалось, постоянна и пропорциональна квадрату амплитуды колебаний А2 .В колебательном процессе происходит непрерывный переход кинетической энергии в потенциальную и обратно. Однако сумма их в любом из состояний точки остается постоянной. Когда же точка проходит через, положение равновесия х = 0, потенциальная компонента обращается в нуль, а кинетическая — достигает максимума и равна при этом полной энергии. Когда же колеблющаяся точка доходит до одного из крайних положений х = ± А, то = 0 и Ек = 0, а ЕП = max и равна полной энергии гармонического колебания.
4.3.Гармонический и ангармонический осциллятор
Систему, колебания которой совершаются относительно устойчивого центра равновесия, называют осциллятором. Если колебания системы являются гармоническими, то такую систему называют гармоническим осциллятором. В теории колебаний гармонический осциллятор представляет собой модель, широко используемую в ряде задач классической и квантовой физики. Реальным примером гармонического осциллятора могут быть пружинный, математический и физический маятники, электрический колебательный контур.
П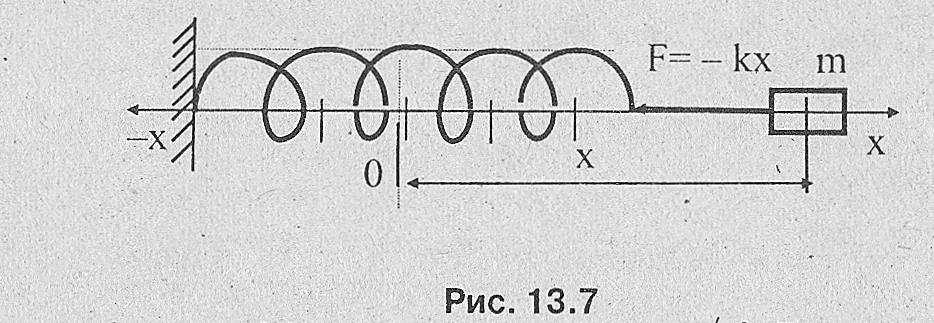 ружинный
маятник — это двухкомпонентная система,
состоящая из груза массой т
и
абсолютно упругой пружины (рис. 13.7).
ружинный
маятник — это двухкомпонентная система,
состоящая из груза массой т
и
абсолютно упругой пружины (рис. 13.7).
Подобная система способна к гармоническим колебаниям вдоль оси х под действием упругой силы F = - кх, где к— коэффициент упругости, кг/с2. В данном случае его называют еще жесткостью. Именно упругая сила пружины используется в качестве возвращающей силы системы. По второму закону Ньютона: та = — кх. Тогда уравнением движения пружинного маятника следует считать
![]()
Из уравнения движения очевидно, что циклическая частота пружинного осциллятора равна
![]() рад/с,
рад/с,
а его период
![]()
Если
учесть, что в формуле ЕП=
![]() а
а
![]() ,
то
потенциальная энергия пружинного
маятника при действии на него упругой
силы пропорциональна квадрату отклонения
груза от положения равновесия и
определяется соотношением ЕП
= кх2/2.
Этот
же результат известен из раздела
«Механика».
,
то
потенциальная энергия пружинного
маятника при действии на него упругой
силы пропорциональна квадрату отклонения
груза от положения равновесия и
определяется соотношением ЕП
= кх2/2.
Этот
же результат известен из раздела
«Механика».
Пружинный маятник является примером свободного механического осциллятора, колеблющегося без энергетических потерь. Антиподом его могут рассматриваться гравитационные маятники, к которым относятся математический и физический маятники.
Математический
маятник — это идеализированная система,
состоящая из материальной точки массой
т
и
невесомой недеформируемой нити длиной
![]() (рис. 13.8, 13.9).
(рис. 13.8, 13.9).
В состоянии равновесия системы силы тяжести и натяжения FH уравновешивают друг друга (рис. 13.8).
Е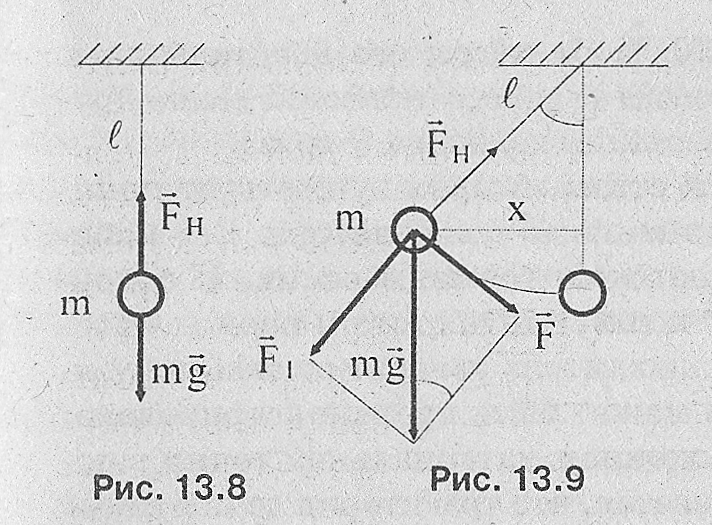 сли
вывести маятник из положения равновесия,
то движение материальной точки будет
совершаться под действием возвращающей
силы тяжести mg
(рис.
13.9), которая в этом случае будет направлена
под углом к силе натяжения FН
.
При движении маятника эти силы не могут
быть уравновешены. Из рис. 13.9 очевидно,
что значение возвращающей силы составляет
часть силы тяжести mg
и определяется величиной угла отклонения
a:
F
=
mgsina.
Опытом установлено, что математический
маятник совершает гармонические
колебания, если угол отклонения не
превышает 8°. При этом условии можно
допустить sina
сли
вывести маятник из положения равновесия,
то движение материальной точки будет
совершаться под действием возвращающей
силы тяжести mg
(рис.
13.9), которая в этом случае будет направлена
под углом к силе натяжения FН
.
При движении маятника эти силы не могут
быть уравновешены. Из рис. 13.9 очевидно,
что значение возвращающей силы составляет
часть силы тяжести mg
и определяется величиной угла отклонения
a:
F
=
mgsina.
Опытом установлено, что математический
маятник совершает гармонические
колебания, если угол отклонения не
превышает 8°. При этом условии можно
допустить sina![]() a
= x/
(рис. 13.9). Учитывая противоположность
направлений смещения материальной
точки и возвращающей силы, получаем F
= —mgx/
,
где
х
—
значение смещения маятника от положения
равновесия. Ускорение маятника равно:
a
=
a
= x/
(рис. 13.9). Учитывая противоположность
направлений смещения материальной
точки и возвращающей силы, получаем F
= —mgx/
,
где
х
—
значение смещения маятника от положения
равновесия. Ускорение маятника равно:
a
=![]() ,
м/с2,
а
циклическая частота —
,
м/с2,
а
циклическая частота —
![]() рад/с.
рад/с.
П ериод
колебаний математического маятника
при
ериод
колебаний математического маятника
при
![]()
![]() 8°
Т=
8°
Т=![]() ,
с, не зависит от массы маятника и амплитуды
его колебаний.
,
с, не зависит от массы маятника и амплитуды
его колебаний.
Практическое значение математического маятника состоит в том, что, используя его, можно определить ускорение g силы тяжести.
Физический маятник —- это твердое тело с распределенной массой, совершающее гармонические колебания под действием силы тяжести вокруг неподвижной горизонтальной оси А подвеса, не совпадающей с центром масс О. (рис. 13.10) маятника. Программа не предусматривает рассмотрение параметров колебания физического маятника. Кстати, африканские женщины с грузом на голове подобны физическому маятнику. Масса груза может достигать 20% от массы его носительницы. Считают, что КПД этого способа переноса тяжестей выше других. Объясняют это колебательным движением груза.
Наряду с гармоническим осциллятором существует понятие ангармонического (нелинейного) осциллятора. Его колебания, конечно же, отличаются от гармонических. И основная особенность их состоит в том, что "частота и период колебаний ангармонического осциллятора зависят от амплитуды. Нелинейность осциллятора может быть продемонстрирована, например, одномерным движением материальной точки в потенциальном поле. И оказывается, что траектория точки имеет форму несимметричной потенциальной ямы. Анализ нелинейного осциллятора требует предварительного рассмотрения уравнения движения одномерного гармонического осциллятора. Этот вопрос достаточно объемен и сложен, не говоря уже о самом ангармоническом осцилляторе. Вопрос о нем можно рассматривать как специальный
4.4. Сложение гармонических колебаний одного направления смещения и одинаковой частоты
На практике чаще приходится встречаться со сложными колебаниями. Их можно рассматривать как результат сложения гармонических колебаний. Если материальная точка участвует одновременно в двух колебаниях, то величина смещения точки в каждом из колебаний равна:
![]() м,
м,
![]() м.
м.
Ч астоты
обоих колебаний равны, и совершаются
они вдоль одного направления смещения,
а амплитуды А1
и
А2,
и начальные фазы колебаний
астоты
обоих колебаний равны, и совершаются
они вдоль одного направления смещения,
а амплитуды А1
и
А2,
и начальные фазы колебаний
![]() и
и
![]() ,
различны.
Так как векторы А1
и
А2,
вращаются с одинаковой угловой скоростью
(циклической частотой
),
то
разность фаз
,
различны.
Так как векторы А1
и
А2,
вращаются с одинаковой угловой скоростью
(циклической частотой
),
то
разность фаз
![]() между
ними остается постоянной. Результирующее
смещение материальной точки, одновременно
участвующей в двух колебаниях, определяется
алгебраическим Сложением смещений
точки в каждом из колебаний
между
ними остается постоянной. Результирующее
смещение материальной точки, одновременно
участвующей в двух колебаниях, определяется
алгебраическим Сложением смещений
точки в каждом из колебаний
х
=
х1
+ х2
=![]() ,
м.
,
м.
Так
как смещения х1,
и х2
через период времени Т
возвращаются
к своим первоначальным значениям, то
их сумма х
представляет собой периодическое
колебание с тем же периодом Т.
Такое
колебательное движение можно иллюстрировать
графически, используя метод вращающихся
векторов
![]() и
и
![]() (рис.
13.11). При вращении обоих векторов против
часовой стрелки с постоянной угловой
скоростью
=
const
их
проекции х1
и
х2
на ось 0х
будут
совершать гармонические колебания.
Причем, в силу равенства угловых скоростей
векторов
и
угол
между ними
(рис.
13.11). При вращении обоих векторов против
часовой стрелки с постоянной угловой
скоростью
=
const
их
проекции х1
и
х2
на ось 0х
будут
совершать гармонические колебания.
Причем, в силу равенства угловых скоростей
векторов
и
угол
между ними
![]() =
const.
Построим
по правилу параллелограмма вектор
(рис.
13.11). Из рисунка очевидно, что проекция
х
этого вектора на горизонтальную ось
равна алгебраической сумме проекций
исходных векторов х1
+
х2,
= х.
Изменение проекции вектора
, равномерно вращающегося с угловой
скоростью
,
будет происходить по гармоническому
закону с периодом Т
=
2
=
const.
Построим
по правилу параллелограмма вектор
(рис.
13.11). Из рисунка очевидно, что проекция
х
этого вектора на горизонтальную ось
равна алгебраической сумме проекций
исходных векторов х1
+
х2,
= х.
Изменение проекции вектора
, равномерно вращающегося с угловой
скоростью
,
будет происходить по гармоническому
закону с периодом Т
=
2![]() ,
с. По модулю результирующая амплитуда
гармонического колебания по теореме
косинусов равна:
,
с. По модулю результирующая амплитуда
гармонического колебания по теореме
косинусов равна:
![]() (13.7)
(13.7)
Начальная фаза ф результирующего гармонического колебания находится как тангенс угла :
![]()
Проанализируем
формулу (13.7). Если
![]() =
0,
2
,
4
,...,
2т
,
где
т
=
+ 0, 1, 2,..., то
=
0,
2
,
4
,...,
2т
,
где
т
=
+ 0, 1, 2,..., то
![]() =
1, А2
=
=
1, А2
=
![]() =
=
![]() и
и![]() ;
если оба колебания находятся в противофазе,
то есть
=
, З
,
5
,...,
(2m
+ 1)л,
где m
= +0,
1, 2, то
=
-1, А2
=
;
если оба колебания находятся в противофазе,
то есть
=
, З
,
5
,...,
(2m
+ 1)л,
где m
= +0,
1, 2, то
=
-1, А2
=![]() и
и
![]() .
.
И з
полученного следует, что если складываются
два колебания с одинаковыми амплитудами
з
полученного следует, что если складываются
два колебания с одинаковыми амплитудами
![]() но.
противоположными фазами, то А = 0,
то
есть оба колебания взаимно уничтожаются.
но.
противоположными фазами, то А = 0,
то
есть оба колебания взаимно уничтожаются.
Подведем итоги: при сложении двух гармонических колебаний одинакового периода и одного направления результирующее движение есть также гармоническое колебание с тем же периодом и амплитудой А,, находящейся в интервале значений | A1-A2| А A1+A2 .
Примером сложения рассмотренного типа колебаний могут быть звуковые волны от нескольких источников, воспринимаемые ухом, когда барабанная перепонка принимает участие одновременно в нескольких гармонических колебаниях.
Рассмотренный случай сложения гармонических колебаний называют интерференцией колебаний. Определенный интерес вызывает интерференция двух гармонических колебаний одинакового направления, мало отличающихся по частоте. При сложении таких колебаний получаются колебания с периодически изменяющейся амплитудой, называемые биениями (рис. 13.3, четвертый). Биения легко получить от двух одинаковых камертонов.
4.5. Сложение взаимно перпендикулярных колебаний одинаковой частоты
Рассмотрим некоторые частные случаи сложения двух гармонических колебаний с различной разностью начальных фаз и одинаковой частотой, происходящих во взаимно перпендикулярных направлениях вдоль осей х и у:
![]()
![]()
Вначале проанализируем случай, при котором отсутствует разность начальных фаз, то есть = 0. Тогда х/А1 =у/А2 = cos( t + ) и у =
 х,
Последнее
выражение представляет собой уравнение
прямой, проходящей через начало
координат. И следовательно, результирующее
колебание есть гармоническое колебание
материальной точки вдоль прямой с
частотой
и амплитудой
х,
Последнее
выражение представляет собой уравнение
прямой, проходящей через начало
координат. И следовательно, результирующее
колебание есть гармоническое колебание
материальной точки вдоль прямой с
частотой
и амплитудой
 (рис.
13.14 а).
(рис.
13.14 а).Разность начальных фаз = π. В этом случае косинусы отличаются знаком, и: тогда у =
 ,
То
есть
траектория будет диагональю прямоугольника
(рис. 13.14 б).
,
То
есть
траектория будет диагональю прямоугольника
(рис. 13.14 б).Пусть =π/2. Траекторию результирующего колебания при этой разности легко найти следующим образом. Так как = π /2 и cos
 ,то,
возводя в квадрат равенства
,то,
возводя в квадрат равенства
 и
и

 и, складывая квадраты, получаем
и, складывая квадраты, получаем
![]()
![]() или
или
![]()
Т аким
образом, траекторией результирующего
колебательного процесса является эллипс
с полуосями, равными соответствующим
амплитудам (рис. 13.14 в). За период Т
колеблющаяся
точка обходит эллипс в направлении,
показанном стрелкой, со скоростью со,
рад/с. При равенстве амплитуд А1
=
А2
эллипс
вырождается в окружность с радиусом R
= А1
=
А2.
Легко догадаться, что при
=- π
/2 траектория останется прежней, но
изменится направление обхода эллипса
точкой на противоположное и с прежней
скоростью
.
аким
образом, траекторией результирующего
колебательного процесса является эллипс
с полуосями, равными соответствующим
амплитудам (рис. 13.14 в). За период Т
колеблющаяся
точка обходит эллипс в направлении,
показанном стрелкой, со скоростью со,
рад/с. При равенстве амплитуд А1
=
А2
эллипс
вырождается в окружность с радиусом R
= А1
=
А2.
Легко догадаться, что при
=- π
/2 траектория останется прежней, но
изменится направление обхода эллипса
точкой на противоположное и с прежней
скоростью
.
Итак, равномерное движение материальной точки по эллипсу или окружности представляет собой совокупность двух взаимно перпендикулярных гармонических колебаний с фазовым сдвигом на ± /2. В случае произвольного значения разности начальных фаз траектория будет также эллипсом, вписанным в тот же прямоугольник, как это показано на рис. 13.14 г. Высказанное утверждение следует из того, что х и у меняются всегда в пределах –А1 х А1 , А2 у А2. Заметим что конкретный сдвиг фаз определяет вид эллипса и направление его обхода, а прямые на рис. 13.14 а и б можно рассматривать как вырожденный эллипс.
13.6. Сложение взаимно перпендикулярных колебаний разной частоты
П ри
сложении двух взаимно перпендикулярных
гармонических колебаний с разными
частотами возникает результирующее
негармоническое колебание со сложной
траекторией. Замкнутые траектории,
образуемые материальной точкой, которая
совершает одновременно два взаимно
перпендикулярных колебания, называют
фигурами Лиссажу. Фигуры Ж. Лиссажу
можно наблюдать при подаче на пластины
осциллографа двух электрических
сигналов, один из которых имеет некоторую
фиксированную частоту, а другой —
частоту, близкую по значению к
фиксированной. Формы фигур определяются
соотношением этих частот
1
:
2
и разностью начальных фаз
ри
сложении двух взаимно перпендикулярных
гармонических колебаний с разными
частотами возникает результирующее
негармоническое колебание со сложной
траекторией. Замкнутые траектории,
образуемые материальной точкой, которая
совершает одновременно два взаимно
перпендикулярных колебания, называют
фигурами Лиссажу. Фигуры Ж. Лиссажу
можно наблюдать при подаче на пластины
осциллографа двух электрических
сигналов, один из которых имеет некоторую
фиксированную частоту, а другой —
частоту, близкую по значению к
фиксированной. Формы фигур определяются
соотношением этих частот
1
:
2
и разностью начальных фаз
![]() исходных колебаний (рис. 13.15).
исходных колебаний (рис. 13.15).
Т аким
образом, фигура Лиссажу есть траектория,
получаемая от соединения линией
результирующих смещений в различные
моменты времени на плоскости с
координатами х,
у. Сказанное
можно проиллюстрировать рис. 13.16.
Вспомним, что в случае одинаковых частот,
когда
1
:
2=1
: 1, получаются эллипсы, прямые и окружность.
Метод фигур Ж. Лиссажу широко используется
при исследовании соотношений частот
и разности фаз складываемых колебаний.
аким
образом, фигура Лиссажу есть траектория,
получаемая от соединения линией
результирующих смещений в различные
моменты времени на плоскости с
координатами х,
у. Сказанное
можно проиллюстрировать рис. 13.16.
Вспомним, что в случае одинаковых частот,
когда
1
:
2=1
: 1, получаются эллипсы, прямые и окружность.
Метод фигур Ж. Лиссажу широко используется
при исследовании соотношений частот
и разности фаз складываемых колебаний.
4.6. Свободный необратимый осциллятор
Колебательный процесс, как и любой другой, является реальным и, следовательно, необратимым. Это значит, что движение колебательной системы сопровождается энергетическими потерями. И потери эти обусловлены сопротивлением среды движению системы (материальной точки, электрического тока,...) — трением, а в случае электромагнитных колебаний — рассеянием потока излучения и т.д. Потеря колебательной системой энергии приводит к уменьшению амплитуды колебаний, и увеличению их периода. Происходит постепенное" затухание колебаний. Колебания с убывающей амплитудой называют затухающими. Чтобы поддержать в течение длительного времени колебания в гармоническом виде, необходимо к колебательной системе постоянно подводить извне энергию в количестве, компенсирующем ее расход. Такие колебания называют вынужденными.
В
большинстве, практических задач с
необратимым осциллятором убывание
амплитуды колебаний определяется
трением. Величина силы трения
пропорциональна скорости колеблющейся
системы F
=
![]() ,
где
,
где
![]() — коэффициент трения, зависящий от
свойств среды, формы и размеров
движущегося тела, кг/с. Знак «минус»
указывает на то, что сила трения уменьшает
скорость движения. Чтобы получить
дифференциальное уравнение для
механического необратимого осциллятора,
проделаем следующие рассуждения. Прежде
всего, вспомним, что второй закон
Ньютона в дифференциальной форме имеет
вид md2s/dt2=
F.
Для
механической системы в виде движущегося
с трением шарика на пружине (рис. 13.7)
баланс сил равен: F
=
Fтр
+ Fyпр.
— коэффициент трения, зависящий от
свойств среды, формы и размеров
движущегося тела, кг/с. Знак «минус»
указывает на то, что сила трения уменьшает
скорость движения. Чтобы получить
дифференциальное уравнение для
механического необратимого осциллятора,
проделаем следующие рассуждения. Прежде
всего, вспомним, что второй закон
Ньютона в дифференциальной форме имеет
вид md2s/dt2=
F.
Для
механической системы в виде движущегося
с трением шарика на пружине (рис. 13.7)
баланс сил равен: F
=
Fтр
+ Fyпр.
Здесь Fупр = - s — упругая (восстанавливающая) сила пружины, а к — коэффициент упругости материала пружины, кг/с2. Основной закон динамики в дифференциальной форме с учетом изложенного, выглядит следующим образом:
![]() (13.8)
(13.8)
Разделив
компоненты уравнения (13.8) на массу m
системы, и введя обозначения
![]() = 2
= 2![]() и k/т
=
и k/т
=
![]() ,
запишем дифференциальное уравнение
движения материальной точки массой m
под действием упругой силы и силы трения
в форме:
,
запишем дифференциальное уравнение
движения материальной точки массой m
под действием упругой силы и силы трения
в форме:
![]() (13.9)
(13.9)
где
=
![]() —
коэффициент затухания колебаний, с-1;
—
коэффициент затухания колебаний, с-1;
![]() циклическая
частота свободных незатухающих колебаний
той же колебательной системы, но при
отсутствии энергетических потерь, когда
= 0, называемая еще собственной частотой
колебательной системы. Но поскольку
в настоящем параграфе рассматривается
необратимый осциллятор с затухающими
колебаниями, то затухание нарушает
периодичность колебаний, и к нему не
применимы понятия периода и частоты
гармонического (незатухающего) колебания.
Но при малых значениях коэффициента
затухания 8
допускается
к пользованию, понятие частоты со
свободных затухающих колебаний, которое
связано с собственной частотой
через коэффициент затухания
циклическая
частота свободных незатухающих колебаний
той же колебательной системы, но при
отсутствии энергетических потерь, когда
= 0, называемая еще собственной частотой
колебательной системы. Но поскольку
в настоящем параграфе рассматривается
необратимый осциллятор с затухающими
колебаниями, то затухание нарушает
периодичность колебаний, и к нему не
применимы понятия периода и частоты
гармонического (незатухающего) колебания.
Но при малых значениях коэффициента
затухания 8
допускается
к пользованию, понятие частоты со
свободных затухающих колебаний, которое
связано с собственной частотой
через коэффициент затухания
![]() соотношением
соотношением
![]() рад/с.
(13.10)
рад/с.
(13.10)
Частота
свободных затухающих колебаний, как
очевидно из (13.10), меньше частоты
собственных колебаний в обратимой
системе. При
можно считать необратимые колебания
близкими к гармоническим с частотой
![]() .
Тогда условный также период затухающих
колебаний может быть определен по
формуле
.
Тогда условный также период затухающих
колебаний может быть определен по
формуле
![]() с
(13.11)
с
(13.11)
Не рассматривая общих методов решения дифференциальных уравнений, отметим, что в уравнении (13.9) искомая функция s(t) отличается от первой и второй производных от s(t) лишь численными множителями. Такой функцией s(t) в самом общем случае может быть произведение. показательной функции с комплексным показателем степени на синус или косинус. Решение дифференциального уравнения (13.9) подтверждает такое предположение и. дает функцию s(t):
![]() м (13.12)
м (13.12)
Подставив полученную функцию s(t) в уравнение (13.9), можно прийти к выводу, что она удовлетворяет уравнению.
График
функции (13.12) представлен на рис. 13.17. Из
рис. 13.17 очевидно, что колебания не
являются гармоническими, так как понятие
амплитуды в них присутствует условно
из-за ее убывания по времени по закону
А
=
![]() .
.
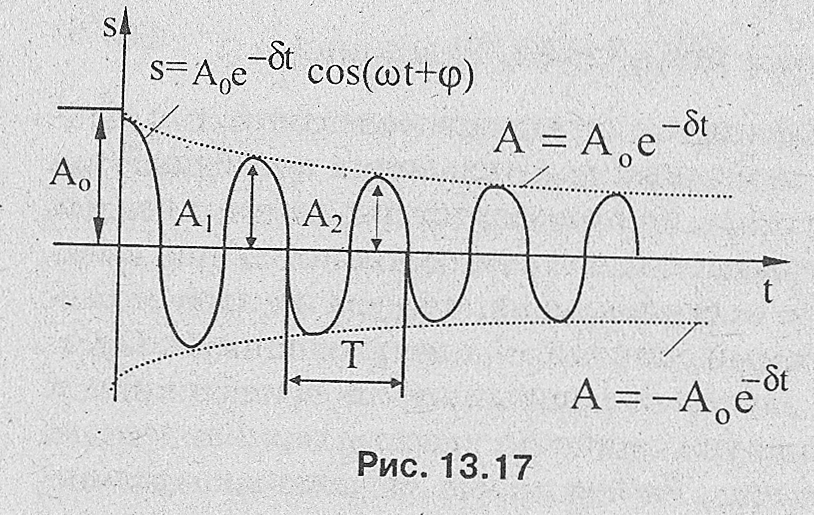
От величины коэффициента затухания зависят также и другие характеристики колебательного процесса.
1. При < отношение амплитуд, отделенных друг от друга интервалом времени в один период, остается постоянным в течение всего процесса затухания. Это значит, что амплитуда затухающих колебаний за каждый период убывает в одно и то же число раз, называемое декрементом затухания
 (0=const).
(0=const).
2. Натуральный логарифм предыдущего отношения называют логарифмическим декрементом затухания
![]()
Время, в течение которого амплитуда необратимых колебаний уменьшается в е = 2,71 раз, называют временем релаксации
 .
Из формулы (13.12) следует, что уменьшение
амплитуды в е
раз
соответствует условию
=
1, следовательно,
= 1/
.
.
Из формулы (13.12) следует, что уменьшение
амплитуды в е
раз
соответствует условию
=
1, следовательно,
= 1/
.В
 теории затухающих колебаний достаточно
часто используется понятие добротности
колебательной системы. Добротность
определяют как отношение
теории затухающих колебаний достаточно
часто используется понятие добротности
колебательной системы. Добротность
определяют как отношение
 =
/(2
).
С
ростом
уменьшается
добротность системы и частота со
затухающих колебаний. Таким образом,
добротность, как и коэффициент
затухания, является характеристикой
степени необратимости колебательного
процесса. При
=
/(2
).
С
ростом
уменьшается
добротность системы и частота со
затухающих колебаний. Таким образом,
добротность, как и коэффициент
затухания, является характеристикой
степени необратимости колебательного
процесса. При
 трение возрастает настолько, что период
колебаний становится бесконечным, а
движение материальной точки теряет
свою периодичность и становится
апериодическим (рис. 13.18).
трение возрастает настолько, что период
колебаний становится бесконечным, а
движение материальной точки теряет
свою периодичность и становится
апериодическим (рис. 13.18).
4.7. Вынужденные колебания. Резонанс
В
реальном колебательном процессе есть
сопротивление. Поэтому механические
колебания всегда будут затухающими.
Для получения незатухающих колебаний
необходимо воздействие переменной
внешней силы. Такую дополнительную
внешнюю силу F
называют
вынуждающей, а возникающие под ее
действием незатухающие колебания —
вынужденными. Пусть вынуждающая сила,
действующая на механическую систему,
изменяется во времени t
по гармоническому закону F
= Focos![]() t,
где
Fo
и
— соответственно амплитуда и циклическая
частота колебаний вынуждающей силы.
Кроме вынуждающей силы, в механической
системе действуют также квазиупругая
сила-Fупр
= —
ks
и
сила сопротивления среды (трения) Fтp
= -
t,
где
Fo
и
— соответственно амплитуда и циклическая
частота колебаний вынуждающей силы.
Кроме вынуждающей силы, в механической
системе действуют также квазиупругая
сила-Fупр
= —
ks
и
сила сопротивления среды (трения) Fтp
= -![]() (см.
п. 13.8). Эти силы противодействуют
вынуждающей силе и при рассмотрении
полной силы, действующей на
колебательную
систему, должны войти со знаком «минус».
С учетом изложенного дифференциальное
уравнение движения примет вид
(см.
п. 13.8). Эти силы противодействуют
вынуждающей силе и при рассмотрении
полной силы, действующей на
колебательную
систему, должны войти со знаком «минус».
С учетом изложенного дифференциальное
уравнение движения примет вид
![]() Н.
Н.
Разделим
уравнение на m,
введем
коэффициент затухания колебаний
=
![]() и частоту свободных незатухающих
колебаний
и частоту свободных незатухающих
колебаний
![]() ,
произведем перестановку в левой и
правой частях и получим неоднородное
дифференциальное уравнение второго
порядка для вынужденных колебаний
,
произведем перестановку в левой и
правой частях и получим неоднородное
дифференциальное уравнение второго
порядка для вынужденных колебаний
![]() (13.13)
(13.13)
Из
опыта следует, что по истечении некоторого
времени после начала действия вынуждающей
силы, в системе устанавливаются
гармонические колебания с частотой
![]() вынуждающей силы. На этом основании
можно предположить, что решением
уравнения (13.13) будет гармоническая
функция следующего вида:
вынуждающей силы. На этом основании
можно предположить, что решением
уравнения (13.13) будет гармоническая
функция следующего вида:
![]() (13.14)
(13.14)
Здесь: — сдвиг фазы между смещением и внешней силой. Продифференцируем по времени уравнение (13.14):
![]() ;
;
![]()
Значения s, ds/dt и d2s/dt2 подставим в равенство (13.13) и получим
![]() (13.15)
(13.15)
Из
(13.15) следует, что гармоническое колебание
![]() является
суммой трех гармонических колебаний
той же частоты. Если изобразить
колебание
является
суммой трех гармонических колебаний
той же частоты. Если изобразить
колебание
![]() вектором
длины
вектором
длины
![]() ,
направленным вправо (рис. 13.19), то колебание
,
направленным вправо (рис. 13.19), то колебание
![]() изобразится
вектором длины
изобразится
вектором длины
![]() ,
повернутым против часовой стрелки
относительно вектора
на
угол
,
повернутым против часовой стрелки
относительно вектора
на
угол
![]() ,
а колебание
—
вектором длины
,
повернутым относительно вектора
на угол
.
Уравнение (13.5) будет удовлетворено
в том случае, если векторная сумма
,
и
будет
равна вектору
,
а колебание
—
вектором длины
,
повернутым относительно вектора
на угол
.
Уравнение (13.5) будет удовлетворено
в том случае, если векторная сумма
,
и
будет
равна вектору
![]() .
Таким
образом, на рис. 13.20 представлены
амплитуды слагаемых колебаний в виде
векторов с учетом разности фаз между
ними. Из изложенного и свойств
прямоугольного треугольника следует
.
Таким
образом, на рис. 13.20 представлены
амплитуды слагаемых колебаний в виде
векторов с учетом разности фаз между
ними. Из изложенного и свойств
прямоугольного треугольника следует
(
)2
=
(
)2+[(![]() )
)![]() ]2,
]2,
откуда
амплитуда
![]() (13.16)
(13.16)
Р ис.
13.19 отвечает условию
<
. Для случая
>
вытекает такое же значение амплитуды
so,
а векторная диаграмма амплитуд имеет
вид (рис. 13.20).
ис.
13.19 отвечает условию
<
. Для случая
>
вытекает такое же значение амплитуды
so,
а векторная диаграмма амплитуд имеет
вид (рис. 13.20).
Сдвиг фазы представляет собой величину отставания по фазе вынужденного колебания (13.14) от обусловившей, его вынуждающей силы. Из рис. 13.19 следует, что
![]() (13.17)
(13.17)
Подставляя в (13.14) so (13.16) и (13.17), получаем решение неоднородного уравнения (13.13):
![]()
П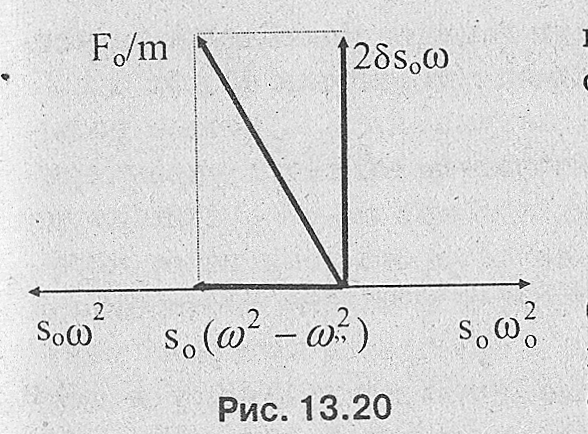 олученная
функция описывает поведение системы
при установившихся вынужденных
колебаниях. Колебания являются
гармоническими и имеют частоту, равную
частоте вынуждающей силы. А амплитуда
вынужденных колебаний пропорциональна
амплитуде вынуждающей силы и зависит
от частоты вынуждающей силы и параметров
колебательной системы. Зависимость
амплитуды вынужденных колебаний от
частоты вынуждающей силы приводит
к тому, что при некоторой частоте,
характерной для данной системы, амплитуда
колебаний достигает максимального
значения. Колебательная система наиболее
чувствительна к действию вынуждающей
силы при этой частоте. Эта частота
называется резонансной —
рез,
а явление или состояние системы при
этой частоте — резонансом. Значение
резонансной частоты можно определить
из условия экстремума функции (13.16). Для
этого достаточно установить минимум
подкоренного выражения знаменателя
этой функции, то есть приравнять нулю
его первую производную:
олученная
функция описывает поведение системы
при установившихся вынужденных
колебаниях. Колебания являются
гармоническими и имеют частоту, равную
частоте вынуждающей силы. А амплитуда
вынужденных колебаний пропорциональна
амплитуде вынуждающей силы и зависит
от частоты вынуждающей силы и параметров
колебательной системы. Зависимость
амплитуды вынужденных колебаний от
частоты вынуждающей силы приводит
к тому, что при некоторой частоте,
характерной для данной системы, амплитуда
колебаний достигает максимального
значения. Колебательная система наиболее
чувствительна к действию вынуждающей
силы при этой частоте. Эта частота
называется резонансной —
рез,
а явление или состояние системы при
этой частоте — резонансом. Значение
резонансной частоты можно определить
из условия экстремума функции (13.16). Для
этого достаточно установить минимум
подкоренного выражения знаменателя
этой функции, то есть приравнять нулю
его первую производную:
![]()
Уравнение
имеет три решения:
=
0 и
=![]() Решение
= 0 соответствует максимуму знаменателя,
который имеет место при статическом
смещении системы под действием постоянной
вынуждающей силы. Отрицательное решение
лишено физического смысла, так как
частота не может быть отрицательной.
Следовательно, решение
рез
=
Решение
= 0 соответствует максимуму знаменателя,
который имеет место при статическом
смещении системы под действием постоянной
вынуждающей силы. Отрицательное решение
лишено физического смысла, так как
частота не может быть отрицательной.
Следовательно, решение
рез
=
![]() и есть резонансная частота, которой
согласно формуле (13.16) соответствует
максимальная амплитуда вынужденных
колебаний sрез
= F0
/(2m
),
м.
и есть резонансная частота, которой
согласно формуле (13.16) соответствует
максимальная амплитуда вынужденных
колебаний sрез
= F0
/(2m
),
м.
З ависимость
амплитуды вынужденных колебаний от
частоты
вынуждающей силы показана графически
на рис. 13.21 при различных коэффициентах
затухания
.
Кривые
называют резонансными или
амплитудно-частотными характеристиками.
Из рис. 13.21 очевидно, что при
ависимость
амплитуды вынужденных колебаний от
частоты
вынуждающей силы показана графически
на рис. 13.21 при различных коэффициентах
затухания
.
Кривые
называют резонансными или
амплитудно-частотными характеристиками.
Из рис. 13.21 очевидно, что при
![]() рез
амплитуда стремится к максимуму, величина
которого зависит от коэффициента
затухания
.
С
увеличением
высота,
резонансной кривой уменьшается, а ее
максимум смещается в сторону меньших
частот. При
= 0 все кривые приходят к одному и тому
же, отличному от нуля, предельному
значению, равному F0
/k.
Это
амплитудное значение является смещением
из положения равновесия под действием
постоянной силы F0.
При
рез
амплитуда стремится к максимуму, величина
которого зависит от коэффициента
затухания
.
С
увеличением
высота,
резонансной кривой уменьшается, а ее
максимум смещается в сторону меньших
частот. При
= 0 все кривые приходят к одному и тому
же, отличному от нуля, предельному
значению, равному F0
/k.
Это
амплитудное значение является смещением
из положения равновесия под действием
постоянной силы F0.
При
![]() кривые
асимптотически стремятся к нулю. Это
объясняется тем, что при большой частоте
сила настолько быстро меняет
направление, что система не успевает
заметно сместиться от положения
равновесия. . И последнее, чем меньше
8,
тем
сильнее изменяется с частотой
амплитуда вблизи резонанса, тем
сильнее всплеск амплитуды.
кривые
асимптотически стремятся к нулю. Это
объясняется тем, что при большой частоте
сила настолько быстро меняет
направление, что система не успевает
заметно сместиться от положения
равновесия. . И последнее, чем меньше
8,
тем
сильнее изменяется с частотой
амплитуда вблизи резонанса, тем
сильнее всплеск амплитуды.
Переменные нагрузки вызывают колебания элементов конструкции самолета с частотами, равными частотам вынуждающих переменных сил. Наиболее опасным является тот случай, когда частоты сил возбуждающих колебаний оказываются близкими или даже равными частотам собственных колебаний элементов конструкции и конструкции в целом. Возникающие при этом резонансные колебания сопровождаются резким увеличением амплитуд. Это может привести к разрушению конструкции летательного аппарата. Для устранения возможности резонанса стараются выполнить конструкцию самолета и его элементы таким образом, чтобы частота его собственных колебаний была далека от частот вынуждающих сил. Однако практически осуществить это непросто, так как частоты вынуждающих аэродинамических сил заранее неизвестны.