2.2 Классификация систем автоматического регулирования
1.
По виду воздействующего воздействия
:1Стабилизирующая,
в которой
=const,2Программные
АСР, где
изменяется по заданной временной
программе
= ,3Следящие
АСР, где величина
изменяется в соответствии с изменением
какой либо др. величиной,4Оптимизирующая
АСР, где величина
вырабатывается на оптимальном уровне
и поддерживается на этом уровне с одним
регулятором.
,3Следящие
АСР, где величина
изменяется в соответствии с изменением
какой либо др. величиной,4Оптимизирующая
АСР, где величина
вырабатывается на оптимальном уровне
и поддерживается на этом уровне с одним
регулятором.
2. По принципу действия: АСР по отклонению, АСР по возмущению.
АСР по отклонению:Данная схема АСР относится к АСР по отклонению, т.к. регулирующее воздействие вырабатывает регулировку тогда когда возникает отклонение регулируемого параметра от заданного значения. Недостаток этой АСР: при действии на объект регулируемое возмущение воздействий . появляется не сразу, а с некоторым запаздыванием зависящий от инерционных свойств объекта, т.е процесс регулирования можно выразить следующим графиком:
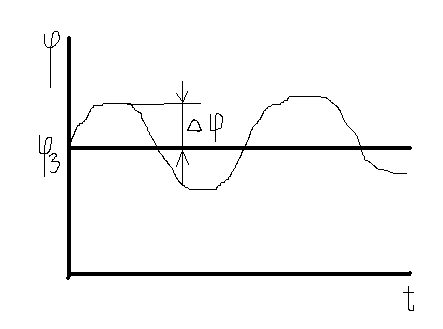
Регулируемая величина имеет колебательную характеристику относительно заданной( ).Достоинство АСР:Идет компенсация всех возможных возмущений воздействий действующих на объект, так как их суммарное воздействие проявляется изменения .
АСР по возмущению. В этих АСР компенсируется только одно возмущающее воздействие, которое появляется на выходе объекта регулирования и этот процесс препятствует появлению .Достоинство: сравнительная быстрота воздействия на объект регулирования что вызывает улучшение качества процесса регулирования.Недостатки: если на объект действует много возмущений, то будет иметь значительное отклонение, поэтому в наиболее ответственных случаях применяют комбинированные АСР, которые реализуются по возмущению и отклонению.
2.3
Объекты регулирования.Свойства
объекта регулирования определяет
система АСР, поэтому для выбора типа
регулятора его настроек необходимо
знать динамические характеристики
объектов регулирования. Динамической
характеристикой ОР–зависимость выходной
величины ОР ( )
выраженная аналитически или графически
от времени при изменении входных величин
и действующих на ОР (
,
)
при отключенном регуляторе.
)
выраженная аналитически или графически
от времени при изменении входных величин
и действующих на ОР (
,
)
при отключенном регуляторе.
2.3.1
Одноемкостные статические объекты.Емкость
– способность объекта запасать
материальную и тепловую энергию.Статическими
наз.
ОР, у кот. каждому значению
соответствует в установившемся режиме
определенное значение регул. величины
,
при отключенном регуляторе. Изменение
регул. величины влияет на величину
воздействия (
,
)
кот.вызывает изменение, т.е. данные
объекты обладают св-вом самовыравнивания.Н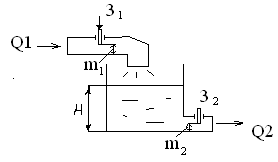 а
притоке жидкости установлена задвижка
З1
в положении m1,
величина
потока на входе Q1.
На стоке установлена задвижка З2
в положении m2,
величина
потока на входе Q2.
В установившемся режиме Q1=Q2
Увеличение закрытия З1
до значения m1‘>m1,
тогда Q1’>
Q1,
при этом увеличится уровень в резервуаре
и увеличивается гидростатический
уровень в нем, величина Q2’>
Q2
и уровень Н’1=соnst,
но Н’1>H.
Изменение уровня описывается уравнением:
а
притоке жидкости установлена задвижка
З1
в положении m1,
величина
потока на входе Q1.
На стоке установлена задвижка З2
в положении m2,
величина
потока на входе Q2.
В установившемся режиме Q1=Q2
Увеличение закрытия З1
до значения m1‘>m1,
тогда Q1’>
Q1,
при этом увеличится уровень в резервуаре
и увеличивается гидростатический
уровень в нем, величина Q2’>
Q2
и уровень Н’1=соnst,
но Н’1>H.
Изменение уровня описывается уравнением: ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
для
получения уравнения в общем виде
необходимо все величины записать в
относительных единицах.
;
для
получения уравнения в общем виде
необходимо все величины записать в
относительных единицах. ,
,
 ,
,
 ,
получаем
,
получаем
 ,
учитывая
что
,
учитывая
что
 ,
характеристика
т.к. З1
линейна
,
характеристика
т.к. З1
линейна
 ,
,
 ,
,
 ,
,
 ,
окончательный
вид
,
окончательный
вид