

2.3.2 Одноемкостные астатические объекты
П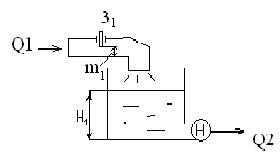 римером
является резервуар, в котором регулируется
уровень жидкости, при этом на стоке
устанавливается насос постоянной
производительности.
римером
является резервуар, в котором регулируется
уровень жидкости, при этом на стоке
устанавливается насос постоянной
производительности.
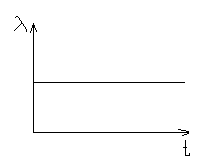
Q2= соnst, предполагаем что m1‘>m1, при этом Q1’> Q1 значит Н1 начнет увеличиваться.
Одноемкостные
астатические объекты–объекты у которых
при изменении регулирующего воздействия
на входе регулируемая величина изменяется
с постоянной скоростью, пропорциональной
величине данного регул. воздействия,
не проходя к новому установившемуся
значению.
 ,
,
 ,
S
- сечение резервуара, Та - время разгона
астатического объекта.
,
S
- сечение резервуара, Та - время разгона
астатического объекта.
Р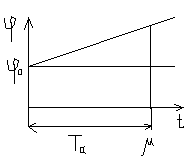 ешим
данное уравнение:
ешим
данное уравнение:
 ,
интегрируем
,
интегрируем
 ,
принимаем
,
принимаем
 ,
получаем
,
получаем
 ,
построим кривую разгона, если
,
построим кривую разгона, если
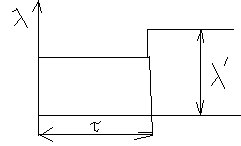
Если
t=Ta
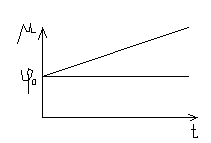
тогда .Второй
вариант Q1=
соnst,
т.к. m1=
соnst,
Q1=Q2
и уровень Н1=соnst,
если увеличится производительность
насоса, т.е. Q2’>
Q2
увеличится величина расхода и уровень
в резервуаре будет уменьшаться, пока
не опорожнится, т.к. не обладает
самовыравниванием получим динамическую
характеристику:
.Второй
вариант Q1=
соnst,
т.к. m1=
соnst,
Q1=Q2
и уровень Н1=соnst,
если увеличится производительность
насоса, т.е. Q2’>
Q2
увеличится величина расхода и уровень
в резервуаре будет уменьшаться, пока
не опорожнится, т.к. не обладает
самовыравниванием получим динамическую
характеристику:
 ,
,
 проинтегрируем
проинтегрируем
 .
При
.
При
 ,
,
 ,
,
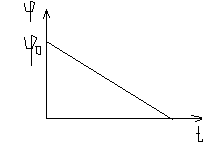
Т.е уровень будет уменьшаться до нуля.
2.3.3 Объекты чистого запаздывания
Пример:
конвейер, перемещающий сыпучий материал
из бункера в аппарат. 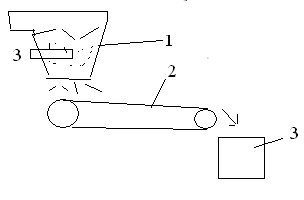 1
- бункер с материалом, 2 - конвеер, 3 -
аппарат, З - заслонка
1
- бункер с материалом, 2 - конвеер, 3 -
аппарат, З - заслонка
К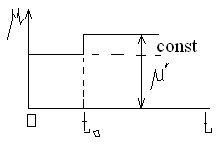
 оличество
материала изменяется за счет положения
заслонки (шибер), обозначим
оличество
материала изменяется за счет положения
заслонки (шибер), обозначим
 -
отношение
изменения регулирующего воздействия
на приходе объекта,
-
отношение
изменения регулирующего воздействия
на приходе объекта,
В
момент времени t0
увеличиваем степень открытия заслонки,
увеличится количества материала,
увеличится. При изменении
на входе изменение на выходе сравняется
через время
 ,
т.к. материал на конвейере. Динамические
характеристики
,
т.к. материал на конвейере. Динамические
характеристики
 ,
где
- время чистого запаздывания, оно равно
времени перемещения материала из бункера
в аппарат.
,
где
- время чистого запаздывания, оно равно
времени перемещения материала из бункера
в аппарат.
2 .3.4
Сложные регулируемые объекты
характеризуются
наличием 2-х емкостей с соответствующими
постоянными временами t1(первой
емкости) и t2
(2-й) объекта. Эти емкости разделены
сопротивлением и в переходном процессе
представляют обмен материалом и тепловой
энергии между этими емкостями. Пример
данного объекта кожухотрубчатый
теплообменник, 1-я емкость - греющая
среда, стенка, а 2-я стенка нагревающая
среда. Динамическая характеристика
данного объекта
.3.4
Сложные регулируемые объекты
характеризуются
наличием 2-х емкостей с соответствующими
постоянными временами t1(первой
емкости) и t2
(2-й) объекта. Эти емкости разделены
сопротивлением и в переходном процессе
представляют обмен материалом и тепловой
энергии между этими емкостями. Пример
данного объекта кожухотрубчатый
теплообменник, 1-я емкость - греющая
среда, стенка, а 2-я стенка нагревающая
среда. Динамическая характеристика
данного объекта
 .
К данным объектам свойственно наличие
времени запаздывания числа r
т.е. 𝜑
изменяется не сразу при изменении 𝜇,
а через некоторое время τ. Решение
данного уравнения зависит от t1
и t2.
Если
.
К данным объектам свойственно наличие
времени запаздывания числа r
т.е. 𝜑
изменяется не сразу при изменении 𝜇,
а через некоторое время τ. Решение
данного уравнения зависит от t1
и t2.
Если
 𝜑=
𝜑= )
П
)
П
𝜑
T
римем 𝜇=const:
𝜇
t
t
τ1
Kоб. 𝜇
A
τn
τ


τn- время переходного запаздывания. Полное время запаздывания τ1=τ+τn, Т - эквивалентная постоянная времени 2-х емкостного статического объекта. Пример теплообменник труба в трубе
2.4.1. Классификация автоматических регуляторов.В АСР непрерывно измеряется значение регулируемой величины, а воздействие регулятора на объект регулирования может быть различным в зависимости от характера воздействия АР делятся на АР: прерывистого действия и непрерывного действия.Регуляторы прерывного действия делятся: импульсные, релейные, позиционные.