

11. Преобразователи параметров движения
Основн. параметрами линейного (кругового) движ. явл.: линейн. перемещение (угол поворота), линейн. (угловая) скорость и линейн. (угловое) ускорение.
Измерение перемещения и угла поворота осущ-т с пом. преобразователей потенциометрического типа, разл-х электромашинных устройств, индуктивных или емкостных преобразователей.
Потенциометрические преобразователи линейн. перемещения или угла поворота изгот-ся обычно с линейн. зависимостью и сопротивления от перемещ. подвижного контакта. Преобразователи могут быть и с др. зависимостью, напр. косинусные (синусные) потенциометры, у к-х R = f(cos ), R = f(sin ), где - измеряемый угол поворота. Они могут использоваться в виде преобразователя «перемещение – напряжение», «угол-напряжение» (Рис. 3.12, а) или включаются в мостовую схему (Рис. 3.12, б)
Электромашинные преобразователи (сельсины), предст. собой малогабаритные электр. машины, сост-е из статора и ротора. На статорах располагаются 3 обмотки, сдвинутые в пространстве на 120 градусов по отношен. друг к др. Роторы имеют по одной обмотке (рис. 3.13 а, б). Возможны два режима работы схемы – трансформаторный и индикаторный.
|
|

В трансформаторном режиме (рис. 3.13, а) ротор одной машины (сельсин – датчика СД) может вращаться и соединяется с источ. углов. перемещения. 2-й ротор (сельсин – приемника СП) фиксируется в неподвижн. полож.
При подаче на обмотку 1-го ротора перемен. питающего напряжения UП, на вых. обмотки 2-го ротора получим вых. напряжение (UВЫХ), пропорц. синусу угла рассогласования роторов. При этом, если оси обмоток сдвинуты на угол /2, напряжение UВЫХ = 0.
В индикаторном режиме (рис. 3.13, б) ротор сельсин - приемника не фиксируется. Его обмотка подсоединяется к питающей сети. При повороте 1-го ротора 2-й также будет вращаться так, что оси их катушек будут занимать одинаков. угловое положение.
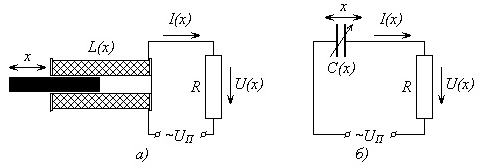
Индуктивные (а) и емкостные (б) преобразователи функц. на основе изменения своего параметра – индуктивности L или емкости С в зав. от перемещ. х элемента конструкции Изменение L или С преобр. в напряжение или ток, функц. связанный с перемещением х (рис. 3.14, а, б).
|
|
Измер. частоты вращения (угловой скорости) проводят с пом. мех., электромашинных, частотных и др. преобразователей.
Механические преобразователи (тахометры) функц. за счет использования ЦС, действующ. на грузы, под действ. к-й они расходятся, перемещая муфту. Линейн. перемещение муфты может быть преобр. в электр. сигнал или использоваться непосредственно в процессе регулирования.
Электромашинный преобразователь (тахогенератор), представляет собой миниатюрный генератор, у которого напряжение пропорционально частоте вращения якоря
Ч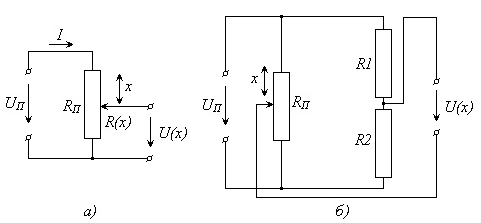 астотные
или импульсные преобразователи формир.
послед-ть электрич. импульсов, частота
следования к-х пропорц. скорости вращения
контролируемого органа.
астотные
или импульсные преобразователи формир.
послед-ть электрич. импульсов, частота
следования к-х пропорц. скорости вращения
контролируемого органа.
При вращении диска, световой поток будет прерывистым. Кол-во формируемых за 1 оборот диска импульсов будет равно кол-ву отверстий или прорезей диска.
При необходимости получения инф. об ускорении, исп. датчики линейного или углового ускорения. В кач-ве датчиков ускорения исп. пьезоэлектрические преобразователи, тензометрические датчики и др.
Преобразование сигнала скорости в сигнал ускорения осущ. с пом. дифференцирующих устройств, для к-х выполняется усл. дифференцирования