

6 Государственная система приборов (гсп) и средств автоматизации
Государственная система промышленных приборов и средств автоматизации предн. для созд. автоматич-х и автоматизиров-х систем контроля, регулир-я и управ. для разл. отраслей нар. хоз-ва. Осн. целью ее создания явл-ся унификация сис-м контроля, регулирования и их элементов, пригодных для раз-х технол-х процессов. Приборы и устройства, отвечающ. требованиям ГСП, могут использ-ся совместно друг с др. независимо от природы источников их питания и сигналов, места и ведомственной принадлежности организации-разработчика и завода-изготовителя.
Функциональная схема ГСП включает 4 осн. группы приборов и устройств:
1. Для получения информации о ТП.
2. Приема, преобразования и передачи инф. о ходе ТП.
3. Преобразования, хранения, обработки инф. и формирования управляющих команд (сигналов).
4. Использования командной инф. для воздействия на ТП как ОУ.
Структура схемы ГСП состоит из неск. ветвей, опред-х видом использования энергии при формировании информац-х сигналов: электрической, пневматической, гидравлической и комбинированной.
Функц. структура электрической ветви ГСП, получившая наиб. распространение в пищ. произв-вах, содержит 5 уровней тех. средств:
I – тех. средства, непосредственно взаимод-е с ОУ;
II – вторичные приборы и регуляторы для простых местных сис-м автоматизации;
III – средства централизованного контроля, регулирования и контроля для сложных систем (АСУТП), включающие цифровую обработку инф.;
IV – средства контроля, регулирования и управления для централизованных АСУТП на базе выч. техники, включ. телемеханику;
V
- средства вычисл. техники и связи для
АСУТП
 предприятий.
предприятий.
Входные и вых.-е электрические сигналы приборов, входящих в ГСП, унифицированы, например:
- сигналы постоянного тока: 0…5; -5…0…5; 0…20 мА;
- напряжения постоянного тока: 0…1; -1…0…1; 0…10;
-10…0…10 В;
- сигнал напряжения переменного тока, частотой 50 и 400 Гц: 0…0,25; 0…0,5; 0…1; 0…2 В (действующего значения).
Пневматический сигнал не должен выходить за пределы изменения давления 0, 02…0,1 МПа.
На практике используется также большое число тех. средств, оперирующ. неунифицированными сигналами. Эти тех. средства вписываются в I и II уровни функциональной ст-ры ГСП.
7 Общие сведения о датчиках
Датчик – это устр-во, восприн-е регистрируемый параметр и преобр-е его в физ. величину, удобную для исп-я в последующих элементах автоматич. системы.
В общем виде датчик предс. в виде 2-х функциональных элементов – чувствительного элемента (ЧЭ) и преобразующего элемента (ПЭ) (Рис. 3.1)
|
Рис. 3.1. Функциональная схема датчика: x(t) – контролируемый параметр; x1(t) – выходная величина ЧЭ; y(t) – выходная физическая величина. |
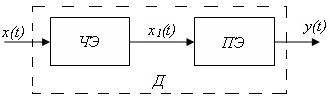
Наиболее распр. в автоматике и телемеханике Д преобразуют неэлектр. контролируемый параметр x(t) в электрич-ю велич. y(t) – напряжение, ток, ЭДС или неэл-ю величину в др. неэлект-ю величину, удобную для дальнейшего использования,
Электрические датчики могут быть параметрическими и генераторными.
Параметрические датчики функц-т на основе зависимости осн. его параметра (сопротивления, емкости или индуктивности) от изм-й вел. Для работы параметрических датчиков необходим источник электр. энергии постоянного или переменного тока. К таким датчикам отн.: контактные, реостатные, потенциометрические, тензодатчики, емкостные, индуктивные, фоторезисторные и др.
Генераторные датчики формируют на выходе ЭДС. или напряжение, функционально связанные с вх. параметром. Пример: термопара, полупровод-никовый фотоэлемент, пьезодатчик, индуктивный датчик и др.
Неэлектрические датчики подразделяются на механические, пневматические, гидравлические и др.
В технической литературе, как пр-ло, датчики классифицируют:
По виду измеряемой величины различ. датчики: температуры, давления, влажности, линейного перемещения, угловой скорости, углового ускорения, освещенности и т. д.
По принципу действия датчики подразд-ся на: механические, потенциометрические, электромагнитные, емкостные, пьезоэлектрические, фотоэлектрические, ультра-звуковые, манометрические электроконтактные и др.
Осн. хар-ми и параметрами датчиков являются: статическая характеристика, чувствительность, порог чувствительности, динамические показатели, погрешность преобразования, выходная мощность (напряжение, ток), выходное сопротивление и т. д.
Статической характеристикой датчика наз. функциональную зависимость, связывающую вых. и вх. величины, т. е. y = f(х). Она может быть задана в виде табл. значений величин х и y, в виде графич. зависимости (Рис. 3.2) или в виде функциональной зависимости.
Чувствительность (коэффициент преобразования) КС – это отношение вых. величины y к вх. величине х.
Ввиду того, что в общем случае зависимость y = f(х) не является линейной, то величина КС для различных значений входной величины х не будет постоянной, т. е.
 .
.
|
. Статическая характеристика. |
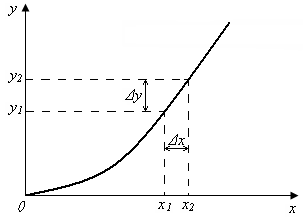
При этом удобнее пользоваться так называемой дифференциальной чувствительностью,
 ,
,
К-я для разн. точек зависимости y =f(х) будет также различной, т. е. Динамические свойства датчиков оценивают, пользуясь временными или частотными характеристиками.