

7.3. Синтез чотириланкових механізмів за коефіцієнтом зміни середньої швидкості та за середньою швидкістю вихідної ланки
Кривошипно -
коромисловий механізм. Задано
довжину коромисла
,
два його крайніх положення за допомогою
кутів
![]() ,
а також коефіцієнт зміни середньої
швидкості
,
а також коефіцієнт зміни середньої
швидкості
![]() вихідної ланки 3.
Потрібно знайти: довжини кривошипа
,
шатуна
та
стояка
(рис.7.4, а).
вихідної ланки 3.
Потрібно знайти: довжини кривошипа
,
шатуна
та
стояка
(рис.7.4, а).
Коефіцієнт зміни середньої швидкості - це відношення середніх кутових швидкостей вихідної ланки при марноході та робочому ході механізму
![]() .
(7.7)
.
(7.7)
Зазвичай величина
коефіцієнта
більша за одиницю,
>1.
Це пов’язано з тим, що при робочому ході
механізму швидкість вихідної ланки
обмежується технологічним процесом.
При марноході такого обмеження немає,
крім того, сили опору є значно меншими,
і тому для підвищення продуктивності
машини швидкість вихідної ланки
вибирається більшою. Відповідно до
цього, рух коромисла з положення 1
у положення
2
приймаємо за робочий хід – кривошип
повернеться на кут
![]() ,
а рух у протилежному напрямі – за
марнохід – кривошип повернеться на кут
,
а рух у протилежному напрямі – за
марнохід – кривошип повернеться на кут
![]() .
Зазначимо, що більший з центральних
кутів повороту кривошипа
,
що відповідає крайнім положенням
вихідної ланки, називають кутом
робочого
ходу.
Як слідує з рис. 7.4, а
, за час
робочого ходу
.
Зазначимо, що більший з центральних
кутів повороту кривошипа
,
що відповідає крайнім положенням
вихідної ланки, називають кутом
робочого
ходу.
Як слідує з рис. 7.4, а
, за час
робочого ходу
![]() та марноходу
та марноходу
![]() кривошип повернеться, відповідно, на
кути
кривошип повернеться, відповідно, на
кути
![]() ,
де
,
де
![]() - кут перекриття,
кут між положеннями шатуна, що відповідають
крайнім положенням коромисла.
- кут перекриття,
кут між положеннями шатуна, що відповідають
крайнім положенням коромисла.
Отже,
![]() .
(7.8)
.
(7.8)
З виразу (7.8) знаходимо кут
![]() .
.
Після цього задача
зводиться до знаходження центра обертання
А кривошипа.
Побудуємо кут ходу коромисла з вершиною
у довільно вибраній точці D, а на його
сторонах відкладемо довжину коромисла
l![]() .
Отримуємо точки С1,
С2.
Проводимо бісектрису ЕD
кута
.
На продовженні прямої ЕD
зі сторони т.С2
відкладаємо кут перекриття
.
Через т.С2,
до перетину з продовженням ЕD,
проводимо пряму, що паралельна стороні
побудованого кута перекриття. З отриманої
точки перетину F,
як із центра, проводимо коло, що проходить
через точки С1,
С2.
Коло радіусом r=C2F
буде
геометричним місцем шуканих центрів
обертання кривошипа, оскільки при виборі
центра у будь-якій точці цього кола, кут
перекриття дорівнюватиме заданому
(кут, вписаний у коло, дорівнює половині
відповідного центрального кута,
.
Отримуємо точки С1,
С2.
Проводимо бісектрису ЕD
кута
.
На продовженні прямої ЕD
зі сторони т.С2
відкладаємо кут перекриття
.
Через т.С2,
до перетину з продовженням ЕD,
проводимо пряму, що паралельна стороні
побудованого кута перекриття. З отриманої
точки перетину F,
як із центра, проводимо коло, що проходить
через точки С1,
С2.
Коло радіусом r=C2F
буде
геометричним місцем шуканих центрів
обертання кривошипа, оскільки при виборі
центра у будь-якій точці цього кола, кут
перекриття дорівнюватиме заданому
(кут, вписаний у коло, дорівнює половині
відповідного центрального кута,
![]() С1АС2=
С1АС2=![]() С1FC2=
).
Щоб задача мала один розв’язок, задамося
додатковою умовою – центр обертання
кривошипа знаходиться на осі абсцис
(інколи додатковою умовою може бути
обмеження
С1FC2=
).
Щоб задача мала один розв’язок, задамося
додатковою умовою – центр обертання
кривошипа знаходиться на осі абсцис
(інколи додатковою умовою може бути
обмеження
![]() ).
Відмітимо, що для більшої точності
радіус r=C2F
допоміжного кола можна порахувати за
формулою
).
Відмітимо, що для більшої точності
радіус r=C2F
допоміжного кола можна порахувати за
формулою
![]() .
.
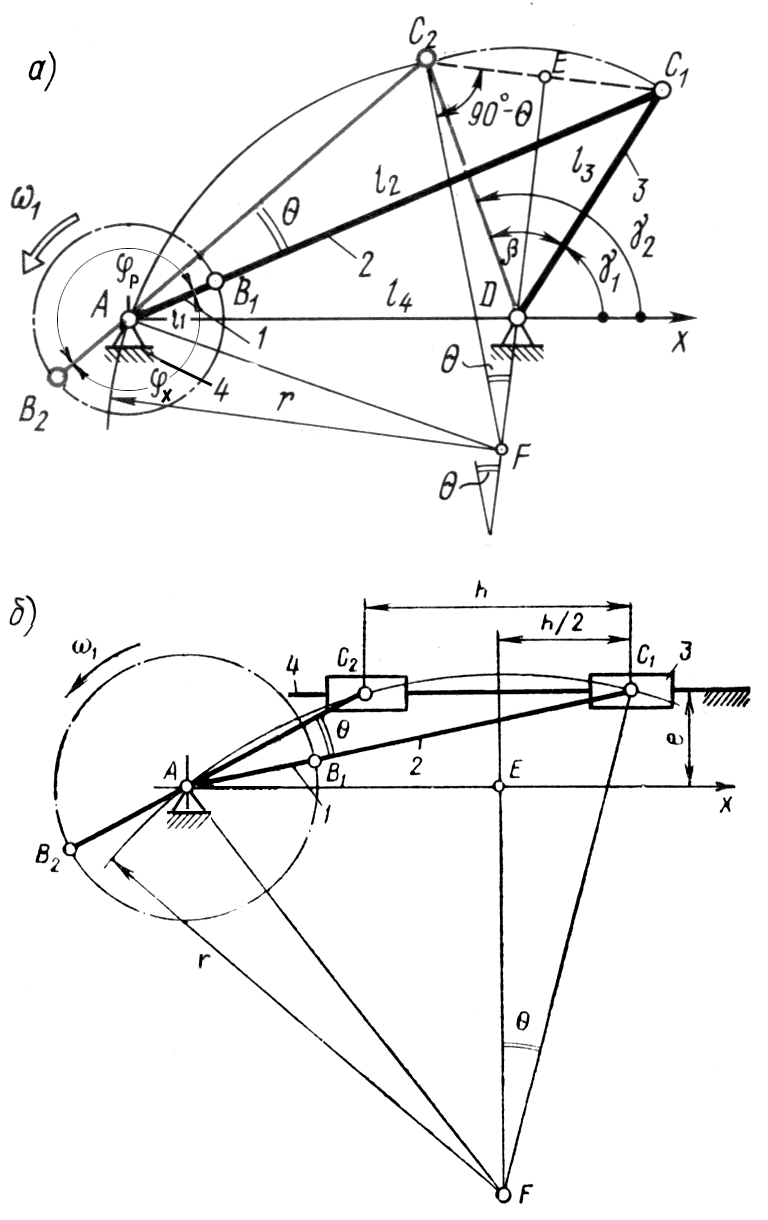
Рис. 7.4
Після цього довжини кривошипа та шатуна вираховуємо за формулами (7.5). Зазначимо, якщо в спроектованому механізмі максимальний кут тиску виявиться більшим за допустимий, слід вибрати інше положення центра обертання кривошипа (на колі радіуса r, вище за точку А ).
Кривошипно-повзунний
механізм. У
центральному кривошипно-повзунному
механізмі швидкість повзуна в прямому
та оберненому рухах однакова, коефіцієнт
зміни середньої швидкості
![]() .
.
При синтезі таких
механізмів часто виникає задача
проектування за відомою середньою
швидкістю
![]() вихідної ланки. Для центрального
механізму хід повзуна дорівнює подвоєній
довжині кривошипа. Тому можна записати
вихідної ланки. Для центрального
механізму хід повзуна дорівнює подвоєній
довжині кривошипа. Тому можна записати
![]() ,
(7.9)
,
(7.9)
де , об/хв – частота обертання кривошипа.
З (7.9) одержуємо довжину кривошипа
![]() .
.
Довжину шатуна
визначаємо за вибраним коефіцієнтом
![]() .
.
Синтез
кривошипно-повзунного механізму зі
зміщенням за заданим коефіцієнтом зміни
середньої швидкості
![]() та ходом вихідної ланки. Коефіцієнт
зміни середньої швидкості вихідної
ланки для даного механізму
та ходом вихідної ланки. Коефіцієнт
зміни середньої швидкості вихідної
ланки для даного механізму
![]() .
(7.10)
.
(7.10)
Розв’язавши рівняння (7.10) відносно кута , одержимо
![]() .
.
Після цього задача зводиться до знаходження центра обертання А кривошипа, яка є аналогічною до розглянутої задачі для кривошипно-коромислового механізму. Проводимо через середину хода h повзуна пряму, перпендикулярну до С2С1 (рис. 7.4, б). Далі, через точку С1 проводимо пряму, що складає кут з побудованим перпендикуляром. Коло радіуса r=C1F , буде геометричним місцем шуканих центрів обертання кривошипа. Якщо задана величина зміщення е , то центр А знаходиться як точка перетину побудованої дуги кола r=C1F та осі абсцис, що знаходиться на відстані е від ходу h.
Кулісний механізм. Розглянемо проектування цих механізмів на прикладі шестиланкового механізму з коливною кулісою (рис. 7.5). Для таких механізмів, як правило, відомо хід h вихідної ланки та коефіцієнт зміни її середньої швидкості .
Виявляється, що для механізмів даного виду коефіцієнт залежить лише від кутового ходу куліси .
.
Як і у попередніх задачах, де зустрічається коефіцієнт зміни середньої швидкості вихідної ланки, знаходимо кут
.
Для визначення довжини куліси розглянемо її крайнє ліве положення
![]() ,
,
а з прямокутного
АВС
визначаємо співвідношення між розмірами
ланок
![]()
![]() (7.11)
(7.11)

Рис. 7.5
З іншого боку, при
вертикальному положенні куліси можна
записати таке співвідношення, що зв’язує
розміри
![]()
![]() ,
(7.12)
,
(7.12)
де а – розмір, що вибирають з конструктивних міркувань.
З виразу (7.12), після підстановки (7.11), знаходимо
![]() .
.
Щодо кутів тиску,
то при ведучому кривошипі кут
![]() =0,
тобто за весь період руху напрям зусилля,
що передається від кулісного каменя
(повзун 2)
до куліси 3,
співпадає зі швидкістю точки прикладання
зусилля. Даний факт є важливою позитивною
властивістю цих механізмів.
=0,
тобто за весь період руху напрям зусилля,
що передається від кулісного каменя
(повзун 2)
до куліси 3,
співпадає зі швидкістю точки прикладання
зусилля. Даний факт є важливою позитивною
властивістю цих механізмів.
З метою забезпечення
найменшого кута тиску
![]() при передачі зусилля від шатуна 4
до веденого повзуна 5
його напрямну
хх необхідно
розмістити таким чином, щоб вона ділила
стрілку сегмента f
навпіл, тоді
при передачі зусилля від шатуна 4
до веденого повзуна 5
його напрямну
хх необхідно
розмістити таким чином, щоб вона ділила
стрілку сегмента f
навпіл, тоді
![]() ,
,
де
![]() .
.
Довжина шатуна 4 виражається через заданий допустимий кут тиску з NDE
![]() .
.
Для інших кулісних механізмів синтез виконується подібним способом.