

§ 19.3. Электродинамические реле
Принцип действия электродинамического реле основан на взаимодействии двух катушек с током, одна из которых подвижна, а другая неподвижна. От магнитоэлектрического реле электродинамическое реле отличается тем, что индукция в рабочем зазоре создается не постоянным магнитом, а неподвижной катушкой на сердечнике, т. е. электромагнитным способом. От электромагнитного реле электродинамическое реле отличается тем, что тяговое усилие воздействует не на стальной якорь, а на подвижную катушку.
Устройство электродинамического реле показано на рис. 19.2. На магнитопровод 3 надета неподвижная катушка 2, обтекаемая током /2. Между полюсными наконечниками магнитопровода находится цилиндрический стальной сердечник 4. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиально направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 1 с обмоткой из тонкого провода, к которой подводится ток /, по спиральным пружинам, создающим противодействующий момент, стремящийся установить плоскость рамки 1 вдоль оси полюсных наконечников.
При подаче управляющего тока /, в обмотку рамки 1 она будет поворачиваться в зазоре между полюсными наконечниками и сердечником. Жестко закрепленный на рамке подвижный контакт 5 замыкается с одним из неподвижных контактов б и 7.
Сила, действующая на проводники рамки электродинамического реле, так же как и для магнитоэлектрического реле, определяется законом Ампера. Следовательно, будут справедливы уравнения (19.1) и (19.2). Однако входящая в эти уравнения индукция В не постоянна, а определяется намагничивающей силой, создаваемой катушкой 2 с током /2:
где Д, — магнитное сопротивление на пути магнитного потока возбуждения; 55 — площадь поперечного сечения рабочего воздушного зазора.
![]()
![]()
![]()
Мвр = */,4 (19.5)
Из (19.5) видно, что направление поворота рамки зависит от направления токов в обеих обмотках реле, т. е. оно будет положительным при одинаковых направлениях токов и отрицательным при разных направлениях.
При работе реле на постоянном токе и питании ,его неизменным по значении) и направлению током возбуждения /2 электродинамическое реле (как и магнитоэлектрическое) является поляризованным и трехпозиционным. В зависимость от направления управляющего тока /, замыкается пара контактов 6—7 или 6—8, а при отсутствии тока /, контакт 6 находится в среднем, незамкнутом, положении.
Однако в отличие от магнитоэлектрического реле электродинамическое может работать при питании переменным ^оком. В этом случае на рамку воздействует Переменный магнитный поток, а направление поворота определяется средним за период значением вращающего момента
где /1 и /2 _ действующие значения токов в обмотках; ф — угол сдви га фаз между токами. •"'''.
Из -(19.6) следует, что электродинамическое реле реагирует на фазу входного сигнала, т. е. его можно использовать как реле сдвига фаз, срабатывающее при определенном значении ф. Это же реле может реагировать и на мощность переменного или постоянного тока. В этом случае на одну из обмоток подается ток, а на другую — напряжение цепи.
При последовательном соединении обмоток // = 12 = 1 вращающий момент
т. е. зависимость тягового усилия от тока будет аналогична электромагнитному нейтральному реле.
К недостаткам электродинамических реле следует отнести их большие габариты и вес.
$ tlil. Индукционные реле
"?***. Принцип действия индукционного реле основан на взаимодействии
переменных магнитных потоков с токами, индуцированными этими потоками.
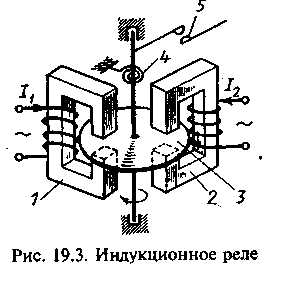
Индукционное реле (рис. 19.3) состоит из двух неподвижных да^кжромагнитов 1 и 2, по обмоткам которых протекают соответственно переменные токи /, и /2. В воздушном зазоре электромагнитов |*етановлен алюминиевый или медный диск 3, который может поворачиваться относительно оси 4. Переменные магнитные потоки, создаваемые электромагнитами 1 и 2, индуцируют ЭДС в диске J, под действием которых в диске создаются вихревые токи (так же, как в короткозамкнутом роторе асинхронного двигателя).
Для того чтобы взаимодействие магнитных потоков с вызванными ими же токами привело к созданию вращающего момента, необходимо наличие сдвига по фазе токов /, и /2. Только в этом случае в зазоре индукционного реле будет создано вращающееся магнитное поле, аналогично тому, как это происходит в двухфазном асинхронном двигателе. При сдвиге фаз между токами /, и /2 в 90° сила взаимодействия магнитного потока электромагнита / с током, индуцированным в диске от потока электромагнита 2, будет всегда совпадать по направлению с силой взаимодействия магнитного потока электромагнита 2 с током, индуцированным в диске от потока электромагнита 1. При совпадении токов /, и /2 по фазе в среднем за период результирующая сила будет равна нулю.
Вращающий момент, приложенный к диску, определяется так:
где К — постоянный коэффициент, зависящий от конструктивных и обмоточных данных реле; ф — фазовый сдвиг между /, и /2.
Этот вращающий момент, преодолевая сопротивление пружины 4, поворачивает диск до тех пор, пока не замкнутся контакты 5.
Поскольку индукционное реле реагирует на фазу, его (как и электродинамическое) можно применять в качестве реле фазы. Малая инерция подвижной части позволяет использовать такие реле как быстродействующие в схемах автоматической защиты и блокировки. Особенно они распростране-
Рассмотрим также применение индукционного реле в качестве реле скорости (рис. 19.4). Входной вал 5 реле связан с механизмом, скорость которого требуется контролировать. На валу 5 установлен цилиндрический постоянный магнит 4. При вращении поле магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора 6. В обмотке 3 наводится ЭДС, значение которой пропорционально скорости вращения входного вала 5. Под действием этой ЭДС по обмотке 3 проходит ток, сила взаимодействия которого с вращающимся полем магнита 4 стремится повернуть статор 6 в направлении вращения. При определенной скорости вращения сила возрастает настолько, что упор 2, преодолевая противодействие

плоской пружины, переключает контакты реле. В зависимости от направления вращения переключается контактный узел / или 7. Точность работы индукционного реле скорости невелика. В точных системах контроля скорости необходимо использование более сложной схемы, включающей в себя индукционный датчик скорости и высокочувствительное поляризованное реле.