

§ 17.5. Тяговая и механическая характеристики электромагнитного реле
Перемещение якоря электромагнитного реле происходит под действием двух сил: силы тяги, обусловленной электромагнитным полем, и противодействующей силы, обусловленной упругой деформацией пружин. Обе эти силы зависят от перемещения якоря, т. е. от величины зазора § между якорем и сердечником.
Зависимость7 "между Электромагнитной силой тяги F3 и величиной зазора 5 называется тяговой характеристикой Рэ =/(5). Зависи- • моеть между противодействующей силой Гы и величиной зазора 6 называется механической характеристикой: FM =/(5)v-
Рассмотрим сначала тяговую характеристику электромагнитного механизма реле. К обмотке реле, имеющей активное сопротивление
Магнитную
энергию, запасенную в воздушном зазоре,
приближенно
определяем как площадь всего треугольника
ОаФ:
![]()
![]()

![]()
Уравнение равновесия напряжения в процессе срабатывания реле записывается в соответствии со вторым законом Кирхгофа и законом электромагнитной индукции:
Умножим выражение (17.1) почленно на idt и проинтегрируем его за время от 0 до /, в течение которого магнитный поток возрастет от 0 до Ф:
Левая часть уравнения (17.2) — это вся энергия, полученная от источника питания. Первое слагаемое в правой части — это энергия, расходуемая на нагрев обмотки. Второе слагаемое в правой части — это энергия, запасенная в магнитном поле реле:
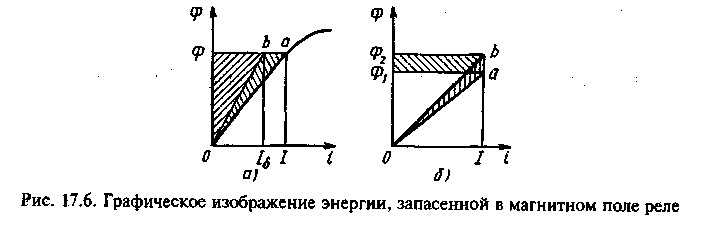
Данный интеграл может быть представлен графически как площадь фигуры, заключенной между кривой намагничивания и осью ординат (рис. 17.6). Энергия магнитного поля состоит из энергии, которая сосредоточена в воздушном зазоре (заштрихованная площадь ОЬФ на рис. 17.6, а), и энергии, распределенной в стальных частях магнитопровода (заштрихованная площадь ОаЬ на рис. 17.6, а). Магнитопровод реле обычно не насыщен, т. е. работа реле происходит на прямолинейном участке кривой намагничивания. Поскольку воздушный зазор имеет сравнительно большую величину, можно пренебречь второй частью энергии (площадью ОаЬ).
Теперь рассмотрим процесс изменения энергии магнитного поля при перемещении якоря, полагая ток в обмотке реле неизменным: /= const. При перемещении якоря уменьшается зазор, а магнитный поток увеличивается от Ф, до Ф2. Следовательно, изменение энергии Д W можно приближенно определить как площадь прямоугольника Ф,йМ>2 на рис. 17.6, 6:
![]()
![]()
До начала движения якоря энергия поля определялась площадью треугольника ОаФ, после перемещения якоря на 8 энергия поля определялась площадью треугольника ОЬФ2. Разница этих площадей и даст изменение магнитной энергии в воздушном2 зазоре:
Изменение энергии ДТК по уравнению (17.5) произошло за счет поступления энергии из сети. Половина ее, как видно из уравнения (17.6), пошла на изменение энергии в воздушном зазоре. Куда же была израсходована вторая половина энергии ДЖ, численно примерно равная Д Wb ?
Эта вторая половина энергии (на рис. 17.6, 6 она соответствует площади треугольника ОаЬ) расходуется на создание механической работы /4мех при перемещении якоря под действием электромагнитной силы F3
Магнитный поток в воздушном зазоре создается за счет магнитодвижущей силы (МДС) (Iw)s и пропорционален магнитной проводимости зазора <7S.
Так как мы приняли /= const, то и МДС (Iw)b = const, а изменение потока Af= F2 - f! происходит за счет изменения проводимости воздушного зазора Д(76:
![]()

![]()
![]()
![]()
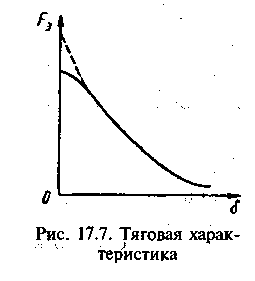
Из (17.12) следует, что электромагнитное тяговое усилие прямо пропорционально квадрату МДС, т. е. не зависит от направления тока в обмотке реле. Эта сила тяги обратно пропорциональна квадрату длины 8 воздушного зазора. Тяговая характеристика Рэ =/(5) показана на рис. 17.7. В зоне малых зазоров реальная тяговая характеристика отличается от теоретической, построенной по (17.12), — штриховая кривая на рис. 17.7. Напомним, что мы выводили уравнение силы тяги, приняв некоторые допущения. При малых зазорах необходимо учитывать магнитное сопротивление стальных участков магнитопровода, которыми мы пренебрегли.
Рассмотрим теперь механическую характеристику реле. Перемещению якоря реле в направлении сердечника противодействуют силы упругих элементов. Такими упругими элементами являются возвратная и контактная пружины.
где Е — модуль упругости материала пру-
Подвижный контакт реле обычно размещается на плоской пружине, представляющей собой упругую металлическую пластину, один конец которой жестко закреплен, а другой — может перемещаться (см., например, контакт б на рис. 17.2). Противодействующая сила, развиваемая плоской пружиной, определяется по формуле
жины; /=Z>/z3/12 — момент инерции пружины; Ь — ширина; h — толщина пружины; / — расстояние от места закрепления пружины до точки приложения силы; х — перемещение пружины в точке приложения силы.
В качестве возвратных обычно используются витые пружины. Зависимость усилия, развиваемого винтовой пружиной, от перемещения имеет вид, аналогичный уравнению (17.15):
В исходном состоянии пружина не деформирована, сила равна нулю. Перемещение пружины х при срабатывании реле будет происходить в направлении уменьшения зазора, поэтому зависимость fM(6) имеет вид
где G — модуль упругости при сдвиге; / — момент инерции при кручении; г — радиус витка пружины; п — число витков; ртч — сала предварительного натяга пружины.
Графики зависимости противодействующих сил пружин имевдт вид прямых линий, поскольку эти силы пропорциональны деформации (перемещению) пружины.
Рассмотрим построение механической характеристики реле на примере контактной группы, показанной на рис. 17.8, а. При срабатывании реле якорь 1 сначала преодолевает натяжение винтовой пружины 4, затем, когда конец рычага доходит до контактной пластины 2, добавляется усилие от ее деформации, а когда контакт пластины 2 замыкается с контактом пластины 3, добавляется и усилие от деформации этой пластины 3. Механическая характеристика FH =/(6) показана на рис. 17.8, б. В исходном состоянии на якорь действует лишь начальное усилие Гтч — предварительный натяг пружины 4.
При изменении зазора 6 на 5, будет холостой ход рычага якоря до соприкосновения с пластиной 2, противодействующая сила возрастает пропорционально деформации винтовой пружины 4 (участок аЬ),
Затем наклон прямой резко возрастает, поскольку началась де--формация пластины 2 (участок be). Такой наклон сохраняется при изменении зазора б на 62 — холостой ход пластины 2 до соприкосновения с пластиной 3. Затем наклон прямой еще возрастает, поскольку началась деформация пластины 3 (участок cd). Рост проти-
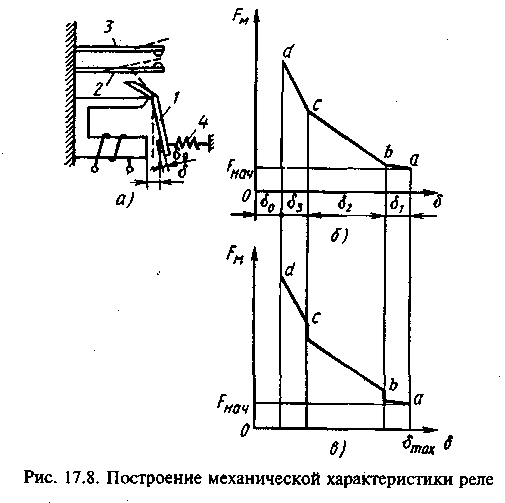
недействующего усилия прекращается, когда якорь полностью притянется к сердечнику. Величина зазора при этом равна толщине штифта отлипания 60. Из построения видно, что механическая характеристика имеет вид ломаной линии, где каждый отрезок характеризует работу какой-либо группы пружин.
В том случае, когда все пружины, создающие противодействующее усилие в контактной группе реле, имеют начальное натяжение, переход с одного отрезка на другой происходит скачком (в точках b и с на рис. 17.8, в).
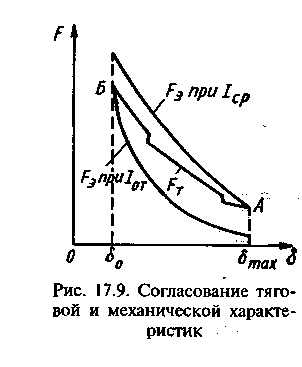
Для работы реле необходимо, чтобы тяговая и механическая характеристики были согласованы. Для срабатывания реле необходимо, чтобы тяговая характеристика, соответствующая току срабатывания, везде находилась выше механической характеристики. При начальном зазоре эти характеристики имеют общую точку (точка А на рис. 17.9). Для
отпускания реле необходимо, чтобы тяговая характеристика, соответствующая току отпускания, везде находилась ниже механической характеристики. При минимальном зазоре эти характеристики могут иметь общую точку (точка Б на рис. 17.9).