

Кафедра301 Рациональное управление объектами теория и приложения
.pdfТиповая схема модуля обнаружения показана на рисунке 2.29.
Модуль
диагностирования
|
|
Рисунок 2.29 – Модуль обнаружения |
|
|
||
На |
вход |
модуля |
поступает, |
например, |
сигнал |
отклонения |
uтг (t) = uтг (t) - uˆ тг (t). Если сигнал uтг (t) |
по абсолютной величине превышает |
|||||
допустимое отклонение, то блоком Switch формируется уровень “лог 1”, если нет – то “лог 0”. Сумматорами Running Sum1 и Running Sum2 с заданным периодом квантования в интервале диагностирования суммируются числа “лог 1” и “лог 0”. Если сумма “лог 1” превышает сумму чисел “лог 1” и “лог 0”, умноженную на коэффициент доверия, то на выходе модуля диагностирования устанавливается сигнал уровня “лог 1”, свидетельствующий о наличии дестабилизации в соединении «УМ + ДМ + ТГ».
Алгоритмы работы остальных модулей диагностирования аналогичны, за исключением незначительных отличий в части допусков пороговых отклонений контролируемых параметров и использовании дополнительных параметров для формирования достоверных результатов диагноза.
Для моделирования нештатных режимов функционирования вводили следующие виды дестабилизирующих воздействий: обрыв напряжения питания усилителя мощности; изменение коэффициентов преобразования усилителя мощности, двигателя-маховика и тахогенератора.
На рисунке 2.30 изображены графики состояния параметров в интервалах времени номинального режима функционирования при обрыве напряжения питания и после автоматического восстановления работоспособности по результатам диагностирования.
80
а |
б |
г
в
д е
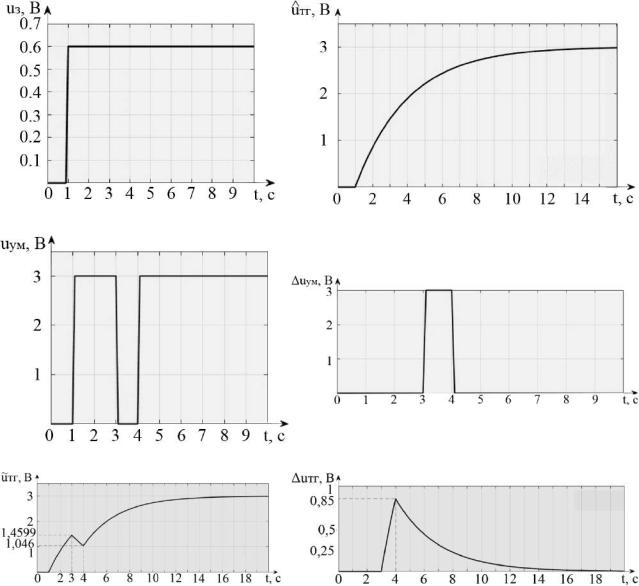
Рисунок 2.30 – Графическое изображение процессов диагностирования
ивосстановления работоспособности при обрыве напряжения питания УМ:
а– задающее воздействие; б – переходная характеристика эталонной модели;
в– напряжение питания УМ; г – диагностирование напряжения питания УМ;
д– переходная характеристика привода; е – диагностирование выходного
параметра привода uтг (t)
Графики отражают следующие параметры и события:
1) на вход электромаховичного привода и эталонную модель одновременно на первой секунде поступает задающий сигнал uз(t) (см. рисунок 2.30, а);
2) напряжение uум (t) на выходе усилителя мощности (см. рисунок 2.30, в) соответствует эталонному;
81
3) в интервале с первой по третью секунду электромаховичный привод функционирует в номинальном режиме uтг (t) = uˆ тг (t) - uтг (t) = 0 (см. рисунок 2.30, б, д, е);
4) на третьей секунде моделируется событие обрыва напряжения питания усилителя мощности (см. рисунок 2.30, в), в результате которого изменяется поведение контролируемых параметров uтг (t) и uум (t) (см. рисунок 2.30, г, е);
Блок |
диагностирования |
по |
отклонению |
uтг (t) = uˆ тг (t) - uтг (t) |
|||||
(см. рисунок 2.30, е) |
формирует признак |
наличия отказа, а по |
отклонению |
||||||
uум(t) = uум(t) -uˆ ум(t) |
(см. рисунок 2.30, |
г) − место |
отказа. |
Вид |
отказа |
||||
идентифицируется |
из |
условия |
|
uум(t) ≥ ρuˆ ум (t) -ρuум(t), |
где |
||||
ρuˆ ум(t) − |
допустимое |
отклонение |
для |
идентификации |
обрыва |
напряжения |
|||
питания. |
|
|
|
|
|
|
|
|
|
По |
результатам |
выполненных |
процедур |
диагностирования |
|||||
на “коммутатор” (см. рисунок 2.27) формируется сигнал с уровнем «1» для отключения УМОСН и включения в работу УМР. Работоспособность
электромаховичного |
привода |
восстанавливается |
на |
четвертой |
секунде (см. рисунок 2.30, д). |
|
|
|
|
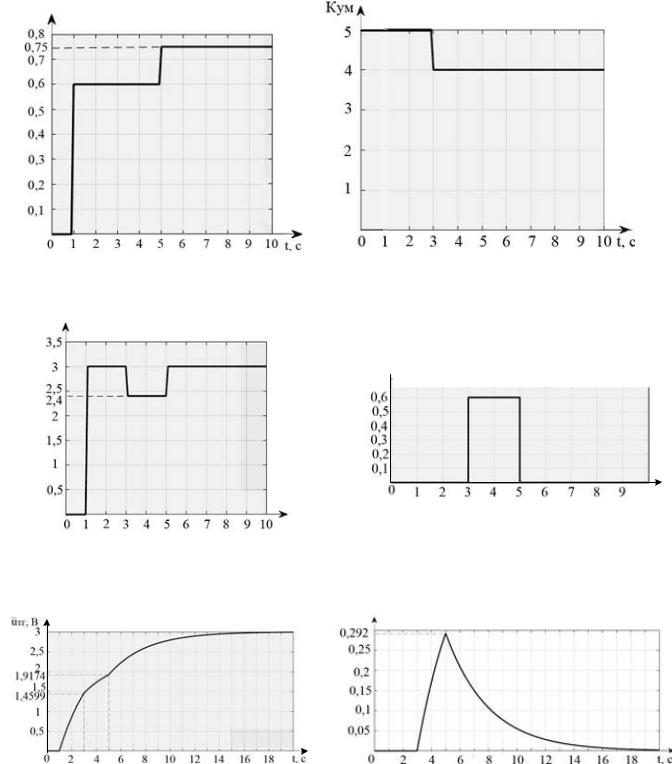
На рисунке 2.31 показаны результаты моделирования по диагностированию нештатной ситуации и восстановлению работоспособности электромаховичного привода при дестабилизации коэффициента преобразования усилителя мощности.
Управляющий сигнал uз(t) = 0,6 В на вход усилителя мощности поступает на первой секунде (см. рисунок 2.31, а). В интервале с первой по третью секунду электромаховичный привод экспоненциально набирает обороты и увеличивает величину кинетического момента.
Переходный процесс электромеханического привода соответствует эталонному поведению и поэтому сигнал отклонения uтг (t) ≡ 0 (см. рисунок 2.31, а). На третьей секунде моделируется событие уменьшения коэффициента преобразования кум с 5 до 4 (см. рисунок 2.31, б), что приводит к
уменьшению |
выходного |
напряжения |
усилителя |
мощности |
с |
uум(t) = 3В до uум = 2,4 В |
(см. рисунок 2.31, |
в). Скорость экспоненциального |
|||
наростания |
напряжения тахогенератора с |
uтг (t) =1,5 В |
до uтг (t) =1,9 В |
||
уменьшается (см. рисунок 2.31, д). |
|
|
|
||
82
uЗ, В
|
|
|
|
|
t, с |
t, с |
||
|
|
|
б
а
uУМ, В
uУМ, В
t, с
t, с
в
г
|
|
uТГ,В |
uТГ,В |
|
|
|
|
|
|
|
t, с |
|||
|
|
t, с |
||
д |
е |
|||
|
||||
Рисунок 2.31 – Графическое изображение процессов диагностирования
ивосстановления работоспособности при изменении кум:
а– задающее воздействие; б – изменение коэффициента передачи;
в– изменение напряжения УМ; г – диагностика изменения напряжения УМ;
д– восстановление работоспособности; е – погрешность напряжения ТГ
83

Блок диагностирования по отклонениям uтг (t) и uум (t) обнаруживает
наличие и место отказа. Идентифицируется вид отказа коэффициента преобразования кум.
Признак дестабилизации кум с уровнем “1” поступает в блок параметрической подстройки, в котором формируется необходимое приращение
задающего параметра для компенсации дестабилизации кум: |
|
|
||
ˆ |
Δuум(t)uз(t) |
|
|
|
uз(t)=uз(t)+Δuз; Δuз = |
|
. |
(2.47) |
|
uˆ ум(t)-Δuум(t) |
||||
|
|
|
||
Момент приращения uз(t) показан на рисунке 2.31, а, восстановление параметров усилителя мощности и тахогенератора до эталонных величин – на рисунке 2.31, в, д.
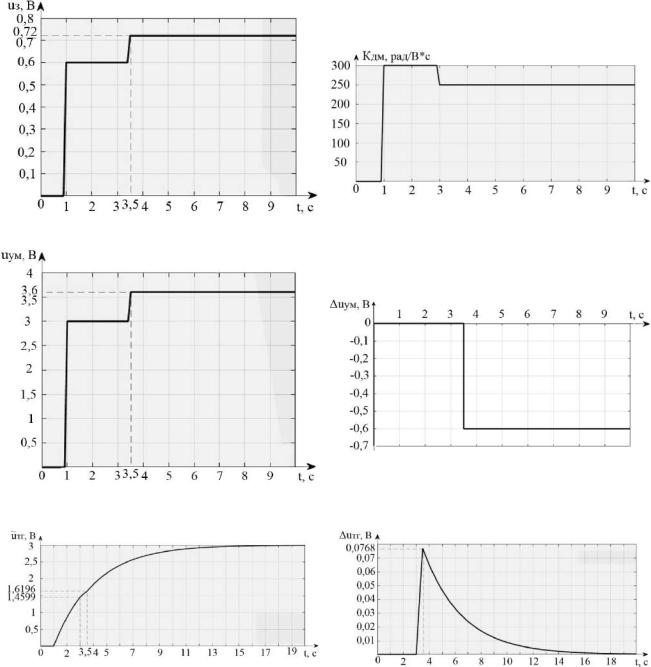
На рисунке 2.32 изображено графическое состояние параметров электромаховичного привода при дестабилизации коэффициента преобразования двигателя-маховика.
Управляющий сигнал uз(t) поступает на вход УМ на первой секунде. В интервале с первой по третью секунды параметры привода соответствуют эталонным величинам. На третьей секунде моделируется событие уменьшения коэффициента преобразования двигателя-маховика кдм (см. рисунок 2.32, б), что приводит к изменению напряжений uтг (t) и uтг (t)(см. рисунок 2.32, д, е).
Так как выходное напряжение uум (t) соответствует эталонному, то блок
диагностирования определяет наличие дестабилизации в соединении «ДМ+ТГ». Дестабилизация коэффициента кдм компенсируется путем подстройки
параметра uз (см. рисунок 2.32, а) из следующих условий:
к |
дм |
= |
Δuтг (t) |
к |
дм |
; |
|
|
uˆ тг (t) |
|
|
Δuум = ˆuˆкум(t)Δ- ккдм ;
дм дм
|
Δuум(t)Δкдм |
|
uз = |
|
. |
кум(ˆкдм - кдм) |
||
84
а |
б |
|
в
г
д |
г |
|
Рисунок 2.32 – Графическое изображение процессов диагностирования
ивосстановления работоспособности при изменении кдм :
а– задающее воздействие; б – изменение коэффициента передачи ДМ;
в – изменение напряжения УМ; г – изменение отклонения uум (k); д – восстановление работоспособности; е – изменение отклонения uтг (k)
На рисунке 2.33 показаны графики состояния параметров электромаховичного привода в интервалах времени: номинального режима
85
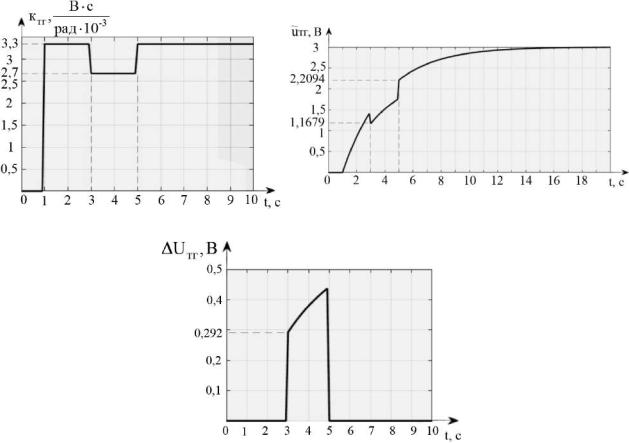
функционирования, при дестабилизации коэффициента преобразования тахогенератора и после восстановления работоспособности.
а |
б |
в
Рисунок 2.33 – Графическое изображение процессов диагностирования и восстановления работоспособности при изменении коэффициента передачи
тахогенератора:
а – изменение коэффициента передачи ТГ; б – восстановление работоспособности; в – погрешность напряжения ТГ
Процессы, показанные на рисунке 2.33, отражают:
1) номинальную величину коэффициента передачи ктг в интервале с первой по третью секунду;
2)дестабилизацию ктг в интервале 3 – 5 с;
3)изменение ктг путем параметрической подстройки:
ктг = ктг + ктг .
На рисунке 2.33, б изображен процесс восстановления выходного сигнала uтг (t) блока маховичного механизма при дестабилизации ктг.
86
Выводы
1.В результате проведенных исследований получены номинальные и функциональные диагностические модели электромаховичного привода как объекта автоматической стабилизации.
2.Разработаны алгоритмы обнаружения дестабилизации, поиска места дестабилизации и определения вида дестабилизации.
3.Исследованы алгоритмы восстановления работоспособности электромаховичного привода по результатам диагноза.
4.С помощью численных методов проведено моделирование электромаховичного привода в номинальных и нештатных режимах функционирования с восстановлением работоспособности.
5.В результате вычислительного эксперимента установлено, что время процедуры диагностирования и восстановления работоспособности намного меньше времени переходного процесса объекта автоматической стабилизации. Это свидетельствует об эффективности используемых методов и о принципиальной возможности рационального управления блоком электромаховичных приводов при различных дестабилизирующих воздействиях.
87

III |
МОДЕЛИРОВАНИЕ УДАРОСТОЙКОГО |
ЛЕТАТЕЛЬНОГО АППАРАТА КАК ОБЪЕКТА |
|
РАЦИОНАЛЬНОГО УПРАВЛЕНИЯ |
|
|
Любая модель − это некоторая абстракция |
космыслению открытых явлений и снова
кпрактике, киспользованию добытых знаний.
Н. Н. Моисеев (1917 − 2000) − известный советский и российский академик, основоположник машинного моделирования динамики биосферы
Ударостойкие беспилотные летательные аппараты − это новый класс малогабаритных летательных аппаратов вертикального взлёта. Исследование динамики движения таких аппаратов как объектов рационального управления невозможно без различного рода моделей. В главе представлены модели, отражающие штатные и нештатные режимы функционирования.
3.1 Устройство и принцип действия ударостойкого летательного аппарата
Ударостойкий летательный аппарат (ЛА) представляет собой аппарат вертолетного типа с двумя соосными воздушными винтами фиксированного шага и противоположного вращения, приводимыми в движение каждый своим валом электрического двигателя постоянного тока, имеющего два соосных и раздельно управляемых ротора противоположного вращения (рисунок 3.1). Питание электродвигателя – от аккумулятора. ЛА имеет две отклоняемые управляющие поверхности для продольного и бокового управления. Отклонение каждой управляющей поверхности осуществляется своей электрической рулевой машинкой. Управляют ЛА с помощью системы автоматизированного управления, работающей в режимах автоматического управления и ручного радиоуправления.
Защитная оболочка − это силовая пространственная стержневая конструкция. В защитной оболочке шарнирно закреплены наружное и внутреннее кольца карданового подвеса. Все шарниры свободные, в результате чего ЛА может свободно вращаться относительно защитной оболочки.
88

В терминах механики летательный аппарат − это механически изменяемая материальная система нескольких твердых тел, которые в рамках рассматриваемой задачи абсолютно твердые, т. е. деформации этих тел не учитываются. Такая материальная система может быть представлена двумя группами материальных тел. Первая группа − собственно ЛА, вторая − защитная оболочка в виде усеченного икосаэдра с кардановым подвесом, где шарнирно закреплён ЛА.
Рисунок 3.1 – Внешний вид ударостойкого летательного аппарата
Таким образом, изучаемый объект при его движении в воздухе − это свободная материальная система с изменяющимися частями и параметрами:
1)угловые скорости вращения роторов двигателя и их кинетические моменты;
2)угловое положение рулевых поверхностей и связанное с этим изменение положения центра масс ЛА и его моментов инерции. В первом приближении изменением положения центра масс ЛА и его моментов инерции можно пренебречь ввиду малой массы рулевых поверхностей;
3)угловое положение ЛА в кардановом подвесе и связанные с этим изменения положения центра масс ЛА в кардановом подвесе, а также положения центра масс системы и моментов инерции системы;
4)угловое положение колец карданова подвеса и защитной оболочки и связанное с этим изменение моментов инерции.
Неизменны следующие параметры:
1)масса системы, ЛА, колец карданова подвеса и защитной оболочки;
89