

Кафедра301 Рациональное управление объектами теория и приложения
.pdfF1
∂F1∂υ 0
= |
∂F1 |
|
|
V + |
∂F1 |
|
|
V + |
∂F1 |
Δθ + |
∂F1 |
|
Δθ + |
∂F1 |
Δυ + |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
∂V |
0 |
|
|
∂V 0 |
|
∂θ |
0 |
|
∂θ |
0 |
|
∂υ |
0 |
|
|||||||||||||||||||||
+ |
∂F1 |
|
P |
+ ∂F1 |
|
|
R + |
|
|
∂F1 |
|
|
|
P |
+ |
∂F1 |
|
|
Δσ |
|
+ ...; |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
||||||||||||||||||||||
|
∂P |
|
|
|
|
|
|
|
∂PП |
П |
|
|
∂σП |
|
|
|
|
||||||||||||||||||
|
0 |
|
|
∂R |
0 |
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|||||||||||||||||
|
∂F |
|
= mcos(θ0 ) |
= a11 |
; |
∂F |
|
= −msin(θ0 )θ0 = a12 ; |
|
||||||||||||||||||||||||||
|
|
1 |
|
|
1 |
|
|
||||||||||||||||||||||||||||
|
∂V |
0 |
∂F |
|
|
|
∂V |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
= −msin(θ0 ) V0 = a13; |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||||||||||
∂F |
|
|
|
|
|
|
∂θ |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
= −msin(θ0 ) V0 − mcos(θ0 ) V0θ0 − R0 sin(θ0 ) = a14; |
(3.86) |
|||||||||||||||||||||||||||||||||
|
1 |
|
|
||||||||||||||||||||||||||||||||
∂θ |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂F |
|
|
|
|
|
|
|||||||
= −P0 cos(υ0 ) − PП0 cos(σП0 )sin( |
υ0 ) = a15; |
= − sin(υ0 ) = a16; |
|||||||||||||||||||||||||||||||||
|
1 |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂P |
0 |
|
|
|
|
|
|||
∂F1 |
|
|
|
|
|
|
|
|
∂F1 |
|
|
= cos(σП0 )cos(υ0 ) = a18 ; |
|
||||||||||||||||||||||
|
= cos(θ0 ) = a17; |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
∂R 0 |
|
|
|
|
|
|
|
∂PП 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
∂F |
= −PП0sin(σП0 )cos(υ0 ) = a19; |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
∂σП 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
a11 |
V+ a12 |
V+ a13Δθ + a14Δθ + a15Δυ + |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
+a16 P+ a17 R + a18 PП + a19ΔσП = 0. |
|
|
|
|
|
|||||||||||||||||||||||
Разложим уравнения (3.77) в ряд Тейлора:
F2 = m(sin(θ) V + cos(θ) Vθ) − Pcos(υ) + Rsin(θ) − PП cos(σП )sin( υ) + mg;
|
∂F2 |
|
∂F2 |
|
∂F2 |
|
∂F2 |
|
∂F2 |
|
||||||||||||||||||||
F2 = |
|
|
|
|
0 |
|
V + |
|
|
0 |
V + |
|
|
0 Δθ + |
|
|
0 |
Δθ + |
|
0 |
Δυ + |
|||||||||
|
∂V |
|
|
∂V |
∂θ |
∂θ |
∂υ |
|||||||||||||||||||||||
|
|
|
|
∂F |
|
|
|
|
|
|
∂F |
|
|
|
∂F |
|
|
|
|
|
∂F |
|
|
|
||||||
+ |
|
|
2 |
|
|
|
P + |
|
2 |
|
|
R + |
|
|
2 |
|
|
PП |
+ |
2 |
|
ΔσП + ...; |
|
|||||||
∂P |
|
∂R |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
0 |
|
|
0 |
|
|
∂PП 0 |
|
|
∂σП 0 |
|
||||||||||||||||
|
|
|
|
∂F |
|
|
= msin(θ0 ) = a21; |
|
∂F |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
2 |
|
|
|
2 |
= mcos(θ0 )θ0 = a22 ; |
|
|||||||||||||||||||
|
|
|
|
∂V |
0 |
|
|
|
∂F |
|
|
|
∂V |
0 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= a23; |
|
|
|
|
(3.87) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
= mcos(θ0 ) V0 |
|
|
|
|
||||||||||||
|
∂F |
|
|
|
|
|
|
∂θ |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
= mcos(θ0 ) V0 |
− msin(θ0 ) V0θ0 + R0 cos(θ0 ) = a24; |
|
||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|||||||||||||||||||||||
|
|
|
∂θ |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
∂F |
|
= P0 sin(υ0 ) − PП0 cos(σП0 )cos(υ0 ) = a25 |
|
∂F |
|
= − cos(υ0) = a26; |
|
2 |
|
; |
2 |
|
||
|
∂υ |
0 |
|
|
∂P |
0 |
|
110
∂F2 |
= sin(θ0 ) = a27 |
|
∂F2 |
|
= − cos(σП0 )sin(υ0 ) = a28; |
|
; |
|
|||||
|
||||||
∂R 0 |
|
|
∂PП 0 |
|
||
|
∂F |
|
= PП0 sin(σП0 )sin(υ0 ) = a29; |
|
2 |
|
|
|
|||
|
∂σП 0 |
|
|
a21 |
V+ a22 V+ a23Δθ + a24Δθ + a25Δυ + |
||
+a26 P+ a27 R + a28 PП + a29ΔσП = 0.
Разложим уравнения (3.78) в ряд Тейлора:
|
|
|
F3 = Iz1прω z − PПlП cos(σ П ) − ( m2l2 − m1l1 ) gsin( υ ) ; |
|
||||||||||||||||||
F |
= |
|
|
∂F3 |
|
Δω |
+ |
|
∂F3 |
|
Δσ |
|
+ |
|
∂F3 |
|
Δυ + |
|
∂F3 |
|
P |
+ ...; |
|
|
|
|
|
П |
|
|
|
|
|||||||||||||
3 |
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
П |
|||||||
|
|
|
|
∂ωz 0 |
|
|
|
∂σП 0 |
|
|
|
∂υ |
0 |
|
|
∂PП 0 |
|
|
||||
|
∂F |
|
|
|
∂F |
|
= PП0lП sin(σП0 ) = a32 ; |
|
3 |
|
= Iz1пр = a31 |
; |
3 |
|
|
|
|
||||||
|
∂ωz 0 |
|
|
∂σП 0 |
|
||
∂F3 |
= − (m2l2 |
− m1l1)gcos(υ0 ) = a33 |
|
∂F3 |
|
= −lП cos(σП0 ) = a34; |
|
; |
|
||||||
|
|||||||
∂υ 0 |
|
|
|
∂PП 0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a31Δωz + a32Δσ П + a33Δυ + a34 PП = 0. |
||||||||||||||||||||||||
Разложим уравнения (3.80) в ряд Тейлора: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
υ = ωz ; Δυ = Δθ + Δα ; |
H + a41 V + a42Δθ = 0, |
|||||||||||||||||||||||||||||||||
где a41 = − sin(θ0 ) ; |
a42 = −V0 cos(θ0 ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Разложим уравнения (3.81) в ряд Тейлора: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
F5 = ny − |
|
Pcos(υ) − Rsin |
(θ) + PП cos(σП )sin(υ) |
; |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mg |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
∂F5 |
|
|
|
|
|
|
+ |
∂F5 |
|
|
|
|
+ |
∂F5 |
|
|
R + |
|
∂F5 |
|
|
|
|
||||||||||
|
F = |
|
|
|
|
|
n |
|
|
P |
|
|
|
|
P + |
|||||||||||||||||||||||
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
5 |
|
|
|
∂ny |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
∂P |
|
0 |
|
|
∂R |
|
0 |
|
|
|
|
∂PП 0 |
|
||||||||||||||
|
|
|
∂F2 |
|
|
|
|
|
∂F2 |
|
|
|
|
∂F5 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
+ |
|
|
|
Δυ + |
|
|
|
Δθ + |
|
|
|
|
ΔσП + ...; |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
∂σП |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
∂υ |
0 |
|
|
|
|
∂θ |
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
∂F |
|
|
|
|
|
∂F |
|
|
|
|
cos(υ |
) |
|
|
|
|
|
∂F |
|
|
|
sin(θ |
) |
|
|||||||||||||
|
|
= 1; |
|
|
|
5 |
|
|
= − |
|
|
0 |
|
|
= a51; |
|
|
|
5 |
|
|
= |
0 |
|
|
= a52 ; |
||||||||||||
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
∂ny |
|
|
|
|
|
|
|
|
|
|
|
|
mg |
|
|
|
|
|
∂R |
|
|
|
mg |
|
|
|
|||||||||||
|
0 |
|
|
|
|
∂P |
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||
111
(3.88)
(3.89)
(3.90)

|
|
|
|
|
|
∂F |
|
|
|
|
cos(σ |
П0 |
)sin(υ |
) |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
5 |
|
|
= − |
|
|
|
|
0 |
|
= a53; |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
mg |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
∂PП 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
∂F |
|
|
P0 sin(υ0 ) − PП0 cos(σП0 )cos(υ0 ) |
|
|
|
∂F |
|
|
|
R0 cos(θ0 ) |
|
|
||||||||||||||
|
2 |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= a54 |
; |
|
5 |
|
|
= |
|
= a55 |
; |
|
∂υ |
|
|
mg |
|
|
|
|
|
|
|
|
∂θ |
|
mg |
||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
sin(σ |
|
|
)sin(υ |
) |
|
|
|
|
|
|
||||||
|
|
|
|
|
∂F |
|
|
P |
|
П0 |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
5 |
|
|
= |
П0 |
|
|
|
|
0 |
|
|
= a56 |
; |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
mg |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
∂σП 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ny + a51 P + a52 R + a53 PП + a54Δυ + a55Δθ + a56ΔσП = 0 .
В уравнениях (3.76), (3.77), (3.90) отклонение аэродинамической силы сопротивления можно найти путём разложения (3.8) в ряд Тейлора с учетом (3.82):
|
∂R |
|
∂R |
V + ...; |
R = |
|
Δα + |
|
|
|
∂α 0 |
|
∂V 0 |
|
|
|
|
|
|
∂R |
|
ρV2S ∂R ∂C |
R |
|
|
|
ρSV2 |
α |
|
|
|
|||||||||||||
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
0 |
CR0 |
= aRα ; |
(3.91) |
||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
∂α 0 |
|
|
|
|
∂CR ∂α |
|
|
0 |
|
2 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
∂R |
|
ρS |
∂R ∂C |
R |
|
|
|
|
|
|
|
|
|
ρSV |
|
V |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
= |
|
|
|
|
|
|
|
+ |
2VCR |
|
|
= |
|
|
|
0 |
(V0CR0 |
+ 2CR0 ) = aRV ; |
|
||||||||
2 |
|
|
|
|
|
|
2 |
|
|
||||||||||||||||||||
|
∂V 0 |
|
|
∂CR ∂V |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
R ≈ aRα Δα + aRV V .
По аналогии для выражений суммарной силы тяги винтов и силы руля продольного управления
|
∂P |
|
|
где aP = |
|
|
; aP |
|
|||
|
|
|
П |
|
∂ωp 0 |
|
|
|
∂P |
; aσ |
= |
П |
|
|
|
|
|
∂ωp 0 |
|
P ≈ aPΔωp ; |
(3.92) |
|
PП ≈ aP |
ω p + aσ σ П , |
(3.93) |
П |
|
|
=∂PП .∂σП 0
Подставим формулы (3.89), (3.91) – (3.93) в выражения (3.86) – (3.88), (3.90)
ивыполним преобразования с учетом начальных условий (3.85).
Влинеаризованных уравнениях (3.94) можно выделить апериодический характер внутренней динамики ЛА по отношению к воздушной скорости и углу атаки и колебательный – по углу тангажа. В целом это характеризует продольное движение как колебательное или маятниковое.
112
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V + aV |
|
|
V + aα Δα + aυΔυ + a |
ωpΔω + aσ |
Δσ |
П |
|
= 0; |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
x |
|
|
x |
|
|
|
|
x |
|
|
p |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δα + aα |
Δα + aV |
V |
− Δω + aυ |
Δυ + aωp |
Δω + aσ Δσ |
П |
= |
0; |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
y |
|
|
z |
|
|
|
y |
|
|
|
|
y |
|
|
|
p |
|
|
|
|
|
y |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δω + a |
υ |
|
|
|
Δυ + aωp Δω + aσ |
|
Δσ |
П |
= 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
mz |
|
|
mz |
p |
mz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H + aθHΔθ = 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.94) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δυ = Δω |
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δυ = Δθ + Δα; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= n |
α |
Δα + nυΔυ + nωp |
Δω + n |
σ |
Δσ |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
y |
|
|
|
|
y |
|
y |
|
|
p |
|
|
y |
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где aVx = |
|
ρSV0 |
(V0CRV |
+ 2CR |
0 |
) ; aαx |
= ρSV02 CαR |
0 |
+ V0θ0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
2m |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
2m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
aυx |
|
= −V0θ0 |
|
− |
1 |
|
(P0 cos(υ0) + PП0 cos(σП0)sin(υ0 )) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
aωxp = |
1 |
(PПω0p cos(σП0)cos(υ0) − P0ωp sin(υ0)); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
cos(υ |
) |
|
(PПσ0 cos(σП0 ) − PП0 sin(σП0 )); aαy |
|
|
|
R |
|
|
|
|
|
|
|
|
|
θ |
|
|
|
|||||||||||||||||||||||||||||||||
aσx |
= |
|
|
|
|
|
|
|
0 |
|
|
|
= |
|
0 |
|
; |
|
aVy |
|
= − |
0 |
; |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
m |
|
|
|
|
|
|
V |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
mV |
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
aυy = −aαy − |
1 |
(P0 sin(υ0 ) + PП0 cos(σП0 )cos(υ0 )) ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
mV |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υ0 )) |
|
|
|
|
|
|
tg(υ |
|
|
) |
|
|
|
|
|
|
||||||
ω |
|
|
|
|
|
1 |
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
||||||||||||||
ayp = |
|
|
|
(P0 p |
cos(υ0 ) + PП0p |
cos(σП0 )sin( |
; aσy = |
|
|
|
|
|
aσx |
; |
|
|
|
||||||||||||||||||||||||||||||||||||||||
mV |
|
|
|
V |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lП cos(σП0 ) |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
||||||||||||
amυ z = − |
m2l2 − m1l1 |
gcos( υ0 ) ; |
aωmpz = − |
PПω0p ; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Iz1пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iz1пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
aσm |
z |
= |
|
lП |
(PП0 sin(σП0 ) − PПσ0 cos(σП0 )) ; aθH = − V0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
Iz1пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
nVy |
|
|
= |
sin(θ0 ) |
aVx |
; nαy = |
|
|
V0 |
aαy ; |
nυy |
= |
V0 |
(aυy + 2aαy ); nωyp |
= |
|
V0 |
|
aωyp . |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|||||
Для решения задачи диагностирования в дальнейшем целесообразно выделить более простой режим полета с минимальным влиянием колебательной составляющей.
113
3.4 Общие положения диагностирования объекта
Как известно, диагностирование – это процесс выявления причин нарушения работоспособности объекта рационального управления [6]. Он сводится к обнаружению дестабилизирующих воздействий, их локализации и идентификации.
Например, для аналоговой техники характерно применение ручных способов диагностики отказов с использованием функциональных и электрических схем с нанесенными эпюрами сигналов в контрольных точках. Однако такой подход требует определенной подготовки специалистов, а иногда из-за недостаточной полноты и достоверности информационных ресурсов приводит к неправильным диагностическим выводам.
Подобно тому, как на схемах аналоговых устройств приводят осциллограммы и некоторые параметры аналоговых сигналов, в цифровой технике применяют сигнатуры в контрольных точках, которые измеряют на заведомо работоспособной системе и отмечают на принципиальной схеме. Другими словами, сопоставляют реальную сигнатуру (в конкретной точке устройства), отображенную на дисплее сигнатурного анализатора, с эталонной сигнатурой этой точки (указанной на схеме или в таблице).
Основываясь на приведенных примерах, рассмотрим методику формирования диагностических моделей для получения и обработки разностного сигнала, характеризующего дестабилизацию, проведем исследования с учетом различных дестабилизирующих факторов в целях разработки предложений по созданию структуры машинного поиска нарушения работоспособности.
3.4.1 Формирование диагностических моделей
Функционирование аналоговой техники описывают системой дифференциальных уравнений, решение которой зачастую затруднено. Также более сложна интерпретация результатов: значения сигналов становятся непрерывными и протяженными во времени. Однако для диагностирования технического состояния объекта необходимо получать и обрабатывать разностный сигнал, характеризующий дестабилизацию.
Рассмотрим методику формирования диагностической модели на примере продольного неколебательного движения ударостойкого летательного аппарата. Для формирования линеаризованных уравнений математической модели такого режима проанализируем выражения коэффициентов системы (3.94).
114
Отсутствие в конструкции ЛА аэродинамических несущих поверхностей приводит к необходимости уравновешивания силы веса силой тяги винтов. Таким
образом, малые отклонения силы тяги |
P, а следовательно, и угловой скорости |
||
вращения Δωp |
винтов от номинального режима можно использовать для |
||
стабилизации высоты полета с малым изменением воздушной скорости |
V. При |
||
фиксированном |
положении руля |
продольного управления ( |
σ П = 0) |
коэффициент передачи ЛА по углу тангажа при изменении угловой скорости вращения ротора двигателя
|
|
|
Δυ |
|
a |
ωmp |
|
ω |
|
k |
υ |
= |
|
= |
|
z |
≈ P |
p . |
(3.95) |
|
|
|
|||||||
|
|
Δω |
|
a |
υ |
П0 |
|
||
|
|
|
p |
|
|
mz |
|
|
|
Чувствительностью силы руля продольного управления PПω0p к изменению угловой скорости Δωp в режиме полета с малой скоростью по траектории,
близкой к вертикальной, можно пренебречь. Тогда линеаризованные уравнения (3.94) представим в виде
|
V + aVx V + aαx Δα = 0; |
|
|||
|
|
Δα + aV |
|
ωpΔω = 0; |
|
Δα + aα |
V + a |
|
|||
|
y |
y |
|
y p |
(3.96) |
|
|
|
|
|
|
H − aθHΔα = 0; |
|
|
|
||
|
ny = nαyΔα. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Геометрические, массовые, инерционные и аэродинамические характеристики исследуемого ЛА для рассматриваемого примера упрощены.
Переход из временной области в область изображений Лапласа позволяет представить систему уравнений (3.96) в следующем виде:
(s + aVx )V(s) + aαxα (s) = 0; |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
V |
V |
ωp |
ωp (s) = 0; |
|
|
(s + ay )α (s) + ay |
(s) + ay |
(3.97) |
|||||||||
|
(s) − aθHα (s) = 0; |
|
|
||||||||
sH |
|
|
|
||||||||
|
y ( |
s |
) |
y |
( |
s |
) |
|
|
|
|
|
|
|
|
|
|||||||
n |
|
|
= nα α |
|
|
|
|
|
|
||
и поставить в соответствие полученной системе уравнений структурную схему (рисунок 3.7).
115
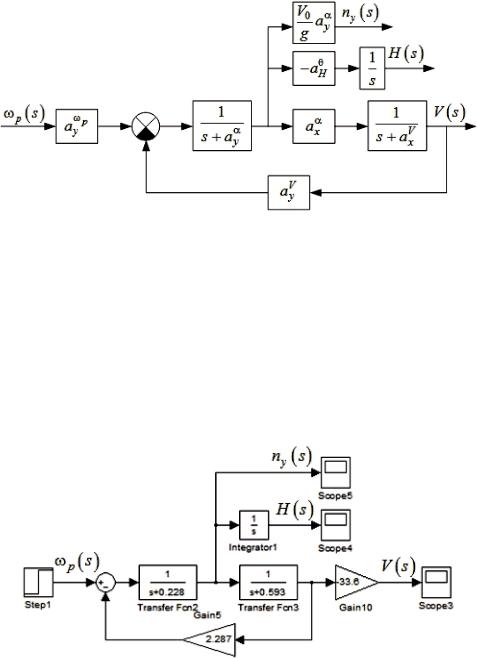
Рисунок 3.7 – Структурная схема продольного движения ЛА
Примем представленную структурную схему как идеальную модель продольного движения ЛА. Для дальнейшего анализа ограничимся выходными сигналами вертикальной скорости Vy , высоты полета H и перегрузки ny .
Схема моделирования продольного движения ЛА в среде Matlab / Simulink [7] с учетом принятых ограничений показана на рисунке 3.8.
Рисунок 3.8 – Схема моделирования продольного движения ЛА
Значения коэффициентов модели определены на основании массогабаритных характеристик и результатов летных испытаний ЛА.
Для исследования влияния дестабилизирующих факторов и формирования разностных сигналов, характеризующих неисправность, последовательно преобразуем полученную модель следующим образом. Блок формирования сигнала управления преобразуем так, чтобы была возможность задавать сигнал управления различной формы и вносить его изменения как дестабилизирующий фактор. Преобразованный блок сигнала управления показан на рисунке 3.9.
116
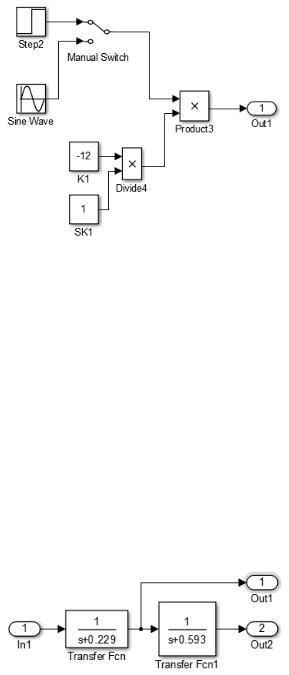
Рисунок 3.9 – Преобразованный блок формирования сигнала управления
На рисунке 3.9 даны обозначения: K1 – коэффициент передачи для управляющего сигнала, SK1 – его смещение, т. е. дестабилизирующее влияние. На втором шаге блоки выбранной модели (см. рисунок 3.8) приведем к стандартному виду инерционного звена, в котором предусмотрена возможность изменения коэффициента передачи Kx и постоянной времени Tx.
На рисунке 3.10 показаны блоки исходной модели, подлежащие преобразованию.
Рисунок 3.10 – Блоки исходной модели
Выполнив преобразования, получим развернутую модель первого (рисунок 3.11) и второго (рисунок 3.12) блоков исходной модели, которые позволяют формировать постоянные времени, коэффициенты передачи и вводить их дестабилизацию.
117
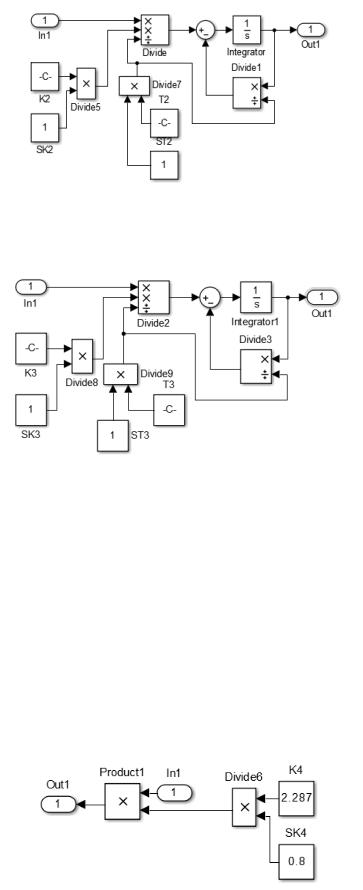
Рисунок 3.11 – Развернутая модель первого блока
|
Рисунок 3.12 – Развернутая модель второго блока |
|
|||
На |
рисунках |
3.11, |
3.12 |
следующие |
обозначения: |
K2, K3 |
– коэффициенты |
передачи, T2, |
T4 – постоянные времени |
||
соответствующих звеньев. Для имитации дестабилизирующих влияний введены элементы SK2, SK3 ST2, ST4, позволяющие изменять значения исходных параметров модели.
Аналогичным образом выполним преобразуем элементы обратной связи (рисунок 3.13) и канала перегрузки (рисунок 3.14) исходной модели.
Рисунок 3.13 – Преобразованный канал обратной связи
118
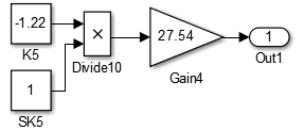
Рисунок 3.14 – Преобразованный канал перегрузки
Как и в предыдущих случаях, обозначим коэффициенты передачи элементов через K4, K5, а для имитации дестабилизирующих влияний введем операторы SK4, SK5.
Таким образом, выполнив преобразования элементов исходной идеальной модели к форме, позволяющей вводить дестабилизирующее влияние, получим развернутую схему моделирования ЛА (рисунок 3.15).
Дальнейший этап предлагаемой методики подразумевает получение разностного сигнала от объекта рационального управления и его эталонной модели с последующей обработкой для формирования предложений по созданию структуры машинного поиска нарушения работоспособности.
Разностный сигнал можно сформировать довольно просто при вычитании значения исследуемого параметра преобразованной модели из соответствующего ему значения эталонной модели. Для проведения промежуточных наблюдений и контроля эти сигналы обозначим как NevН, NevV и NevN – невязки по высоте (H), вертикальной скорости полета (Vy ) и перегрузке (ny ).
На рисунке 3.16 показана модель для формирования разностных сигналов, а на рис. 3.17 − вид разностного сигнала для некоторых значений дестабилизирующих факторов. Из анализа этих диаграмм видно, что непосредственное определение места неисправности крайне затруднено. Поэтому при формировании результата целесообразно ввести пороговый уровень, исключающий помеху, и выполнить нормирование сигнала к уровням «+1» и «-1» в относительных единицах измерения.
119