

Кафедра301 Рациональное управление объектами теория и приложения
.pdf2.2 Исследование линейных моделей ОАС при изменении параметров
В результате обработки полученных экспериментальных характеристик сформированы уравнения и атрибуты линейных моделей.
Двигатели-маховики:
1) максимальная погрешность линеаризации
δmax = umax 100%≤ 6%;
1pm
2) координаты рабочей точки
|
|
|
|
{ |
} |
; |
{ |
} |
; |
{ |
|
|
|
|
} |
{ |
|
|
} |
; |
||
|
|
|
|
1.71;500 |
|
|
2;500 |
|
1.97;500 |
; 1.63;500 |
||||||||||||
3) |
диапазон линеаризации по напряжению |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
Δu1 = 3,3 B; Δu2 = 3,32 B; Δu3 = 3,33 B; Δu4 = 2,8 B; |
|||||||||||||||||||
4) |
диапазон линеаризации по угловой скорости: |
|
|
|||||||||||||||||||
|
|
|
|
|
ω1 =1000рад/с; |
|
ω2 =843,5рад/c; |
|
|
|||||||||||||
|
|
|
|
|
ω3 =860,1рад/с; |
|
ω4 =938,8рад/с; |
|
|
|||||||||||||
5) |
оценочные значения коэффициентов: |
|
|
|
|
|
|
|
|
|
||||||||||||
|
к |
дм1 |
= |
ω1 |
=303рад/(В с); |
|
к |
дм2 |
= |
ω2 |
= 251,4рад/ (В с); |
|||||||||||
|
|
|
Δu |
|
|
|
|
|
|
|
|
Δu |
2 |
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кдм3 |
= |
ω3 = 258,3рад/(В с); |
кдм4 |
= |
|
|
ω4 =335,3рад/(В с); |
||||||||||||||
|
|
|
|
Δu3 |
|
|
|
|
|
|
|
|
|
|
|
Δu4 |
|
|
||||
6) |
передаточная функция |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
W |
(s) = Ωi(s) |
= |
кдмi |
|
|
, |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
i =1,4; |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
дм |
|
|
|
Ui(s) |
|
|
Tдмis+1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
7) масштаб времени mt =1.
Усилители мощности:
1) максимальная погрешность линеаризации
δmax ≤ 2%;
2) координаты рабочей точки
{175;1.71} ; {205; 2} ; {202;1.97} ; {1676;1.63} ; 3) диапазон линеаризации по входу
Δuзi = |
Ti |
|
|
|
|
= 500, i =1,4; |
|
||||
|
|||||
|
Δti |
||||
4) диапазон линеаризации по напряжению
uумi = 5 B, i =1,4;
50
5) оценочные значения коэффициентов
кумi = 5 B, i =1,4;
6) передаточная функция
W |
(s) = |
Uумi(s) |
= к |
|
|
|
|
|
умi |
, i =1,4; |
|
||||||
|
||||||||
умi |
|
τ i(s) |
|
|
|
|||
|
|
|
|
|
|
|||
7) масштаб времени mt =1.
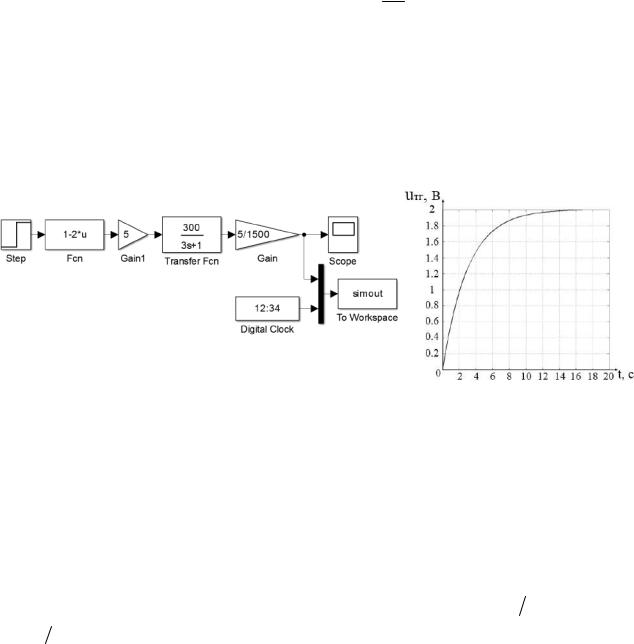
Для моделирования электромаховичных приводов создана S-модель в среде
Simulink (рисунок 2.8).
а б Рисунок 2.8 – Номинальный режим функционирования: а – схема моделирования; б – переходный процесс
Реализация задающего воздействия uз(t) выполняется с помощью блоков «Step» (ступенчатый сигнал) и «Fcn» (математическая функция, прописываемая
пользователем, входной сигнал |
в блок |
|
обозначен символом |
U), в которых |
||||||
реализована |
математическая функция |
( |
) |
. Параметр |
U |
изменяется в |
||||
|
1- 2U |
|
||||||||
пределах 0…1 и отражает физическую величину отношения |
τ T в выражении |
|||||||||
( |
) |
. |
Электромаховичный |
привод |
моделировали при |
номинальных |
||||
1- 2τ T |
|
|||||||||
значениях |
параметров |
элементов |
|
кум = 5,кдм = 300 рад / (В с), |
||||||
Тдм =3с,ктг = 0,003(В с)/ рад и их дестабилизации. Период квантования для всех режимов работ T0 = 0,1c. Результаты моделирования номинальных режимов работы показаны на рисунке 2.8, б.
Схемы моделей и результаты моделирования режимов работы с дестабилизацией параметров изображены на рисунках (2.9) – (2.16).
Дестабилизация коэффициента передачи усилителя мощности происходит в начале моделирования (см. рисунок 2.9) и на четвертой секунде моделирования (см. рисунок 2.10). Эталонная величина кум = 5.
51
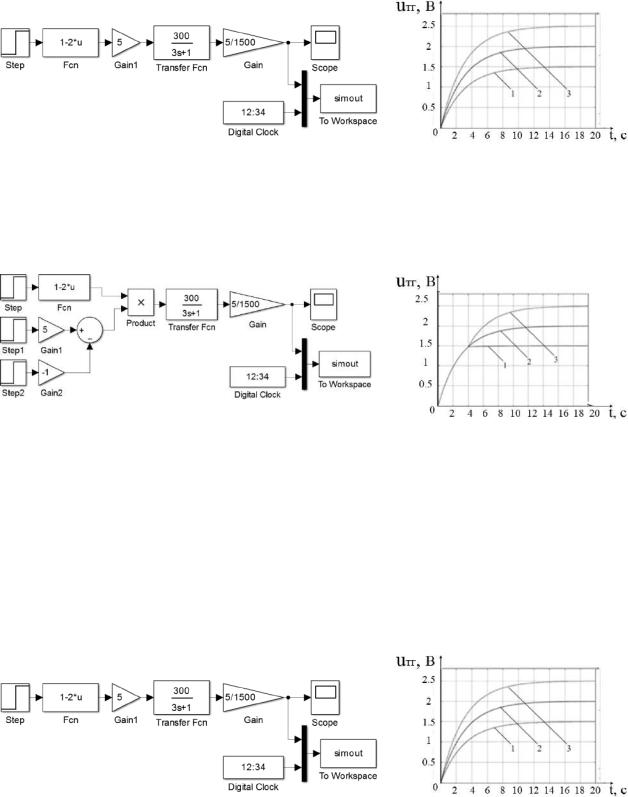
а б Рисунок 2.9 – Дестабилизация коэффициента передачи усилителя мощности
в начале моделирования:
а – схема моделирования; б – переходный процесс;
1-кум = 3,5; 2 -кум = 5; 3-кум = 6,5
а б Рисунок 2.10 – Дестабилизация коэффициента передачи усилителя мощности
на четвертой секунде моделирования:
а – схема моделирования; б – переходный процесс;
1-кум = 4; 2 -кум = 5; 3-кум = 6
Дестабилизация коэффициента передачи двигателя-маховика происходит в начале моделирования (см. рисунок 2.11) и на четвертой секунде моделирования (см. рисунок 2.12). Номинальная величина кдм =300рад /(В с).
а б Рисунок 2.11 – Дестабилизация коэффициента передачи двигателя-маховика
в начале моделирования:
а – схема моделирования; б – переходный процесс;
1-кдм = 225рад /(В с); 2-кдм =300рад /(В с); 3-кдм =375рад /(В с)
52
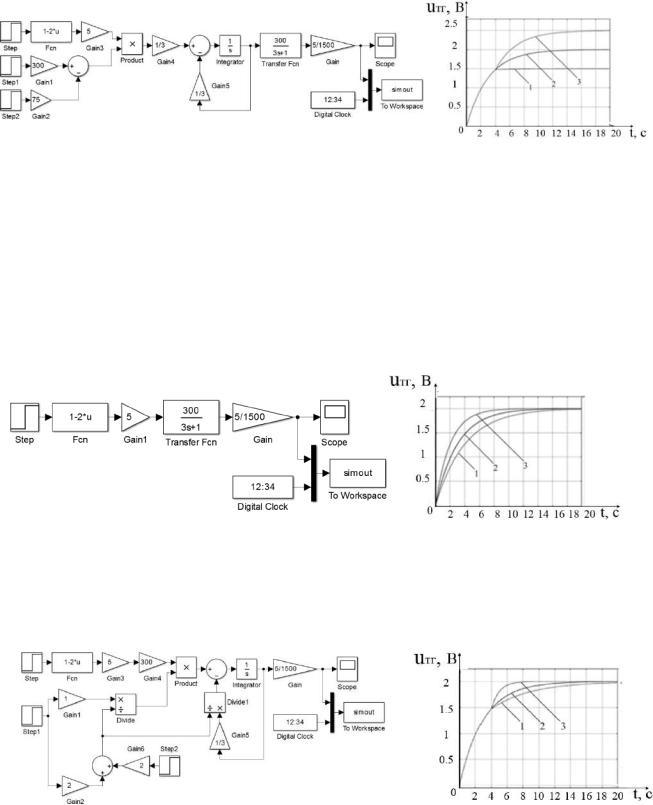
а б Рисунок 2.12 – Дестабилизация коэффициента передачи двигателя-маховика
на четвертой секунде моделирования:
а – схема моделирования; б – переходный процесс;
1-кдм = 225рад /(В с); 2-кдм =300рад /(В с); 3-кдм =375рад /(В с)
Дестабилизация постоянной времени двигателя-маховика происходит в начале моделирования (см. рисунок 2.13) и на четвертой секунде моделирования (см. рисунок 2.14). Эталонная величина Tдм = 3 с.
а б Рисунок 2.13 – Дестабилизация постоянной времени двигателя-маховика
в начале моделирования:
а – схема моделирования; б – переходный процесс;
1-Tдм = 4с; 2-Tдм =3с; 3-Tдм = 2с
а б Рисунок 2.14 – Дестабилизация постоянной времени двигателя-маховика
на четвертой секунде моделирования:
а – схема моделирования; б – переходный процесс;
1-Tдм =5с; 2-Tдм =3с; 3-Tдм =1с
53
В реальных условиях эксплуатации объекта автоматической стабилизации величины коэффициентов преобразования кум ,кдм ,ктг могут изменяться только в
сторону уменьшения, а постоянная времени Tдм – в сторону увеличения.
Функции электромаховичного привода с дестабилизацией этих параметров моделировали как в сторону уменьшения, так и увеличения для получения объема информации, достаточного для анализа и разработки диагностических функциональных моделей.
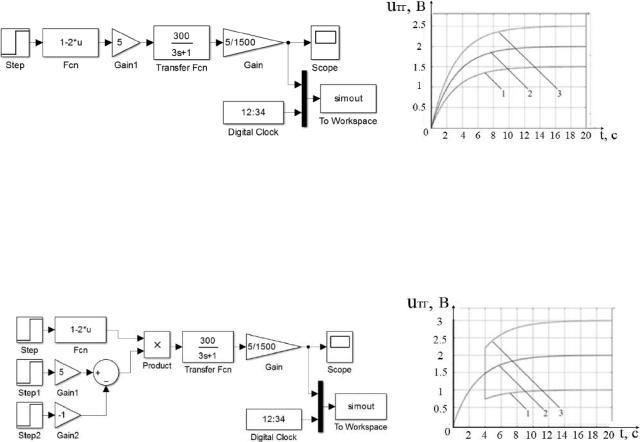
Дестабилизация коэффициента передачи тахогенератора происходит в начале моделирования (см. рисунок 2.15) и на четвертой секунде моделирования (см. рисунок 2.16). Номинальная величина ктг =0,0033(В с)/ рад.
а |
|
б |
Рисунок 2.15 – Дестабилизация коэффициента передачи тахогенератора |
||
|
в начале моделирования: |
|
а – схема моделирования; |
б – переходный процесс; |
|
1-ктг = 0,0017 (В с) / рад; |
2 -ктг = 0,0033(В с) / рад; 3-ктг = 0,05(В с) / рад |
|
|
|
а |
|
|
б |
Рисунок 2.16 – Дестабилизация коэффициента передачи тахогенератора |
|||||
|
|
на четвертой секунде моделирования |
|
||
|
а – схема моделирования; |
б – переходный процесс; |
|||
1-ктг = 0,0017 (В с) / рад; |
2 -ктг = 0,0033(В с) / рад; 3-ктг = 0,05(В с) / рад |
||||
Из результатов моделирования очевидно, что отклонения выходного |
|||||
параметра |
uтг (t) |
в |
переходных |
процессах |
функционирования |
|
|
|
54 |
|
|
электромаховичного привода от номинальных значений имеют индивидуальные особенности, обусловленные дестабилизацией коэффициентов преобразования кум,кдм,ктг . Следовательно, индивидуальность характера отклонения uтг (t) от
дестабилизации кум,кдм,ктг можно использовать при формировании конкретных диагностических признаков места и вида дестабилизации.
2.3 Диагностические модели объекта автоматической стабилизации
Процедура диагностирования предназначена для оценки текущего функционального состояния исследуемого объекта автоматической стабилизации. Основная задача диагностирования – получение достоверной информации о функциональном состоянии объекта автоматической стабилизации и его составных частей. От качества и оперативности информации зависят правильность и оперативность принимаемых решений по восстановлению работоспособности объекта автоматической стабилизации.
Процедура диагностирования в контуре системы автоматической стабилизации (см. рисунок 2.3) – это часть общей задачи управления.
С помощью блока диагностирования решают комплекс задач – от обнаружения дестабилизации до определения вида дестабилизации.
Задача обнаружения дестабилизации заключается в установлении факта
нарушения |
работоспособности |
объекта |
|
автоматической |
||||||||||||
стабилизации (рисунок 2.17). |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
x(t) |
|
|
y(t) |
|
|
|
|
|
|||||||
|
Объект |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
} |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δy(t) |
Классификационная |
|
Результаты |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
обработкаэлементов |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
классификации |
|||
|
|
|
|
|
|
|
|
|
|
|
|
дестабилизации |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эталонная |
|
|
|
|
|
|
|
|
допуски |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
модель |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
объекта |
|
y(t)ˆ |
|
Допуски |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.17 – Функциональная схема процедуры обнаружения дестабилизации
Под нарушением работоспособности понимают любое отклонение статических и динамических характеристик объекта автоматической стабилизации и его фрагментов от номинальных (паспортных) значений.
55
Процедура обнаружения дестабилизации представлена следующими операциями:
1)воспроизведение эталонного поведения контролируемых переменных;
2)сравнение контролируемых переменных с эталонными;
3)формирование допусков для результатов сравнения;
4)классификационная обработка результатов сравнения.
Такая последовательность выполнения операций по обнаружению дестабилизации справедлива как для объекта автоматической стабилизации, так и для отдельных фрагментов [4].
Эталонное поведение ˆy( t) (см. рисунок 2.17) объекта формируется с помощью эталонной модели (ЭМ) на основе входных сигналов x( t) . По разностному сигналу Δy(t) выполняют классификационную обработку (КО) относительно заранее сформированных допусков. Выходной сигнал элемента сравнения Δy(t) есть диагностический признак объекта. Этот принцип обнаружения дестабилизации справедлив для объектов с известным входом. Система угловой стабилизации относится к таким объектам, так как величина задающего сигнала для создания необходимого управляющего момента всегда известна.
Согласно функциональной схеме, отражающей процедуру обнаружения дестабилизации, для получения диагностического признака необходимыми элементами процедуры диагностирования являются эталонные модели всех функциональных элементов системы. Исходные данные для построения эталонных моделей функциональных элементов системы – это структуры уравнений, которые описывают преобразовательные свойства и номинальные значения параметров статических и динамических характеристик.
Математическую конструкцию эталонной модели объекта автоматической стабилизации формируют из эталонных моделей ее элементов.
Для построения эталонной модели объекта автоматической стабилизации с электромаховичными приводами достаточно наличия статических и динамических характеристик:
1)усилителей мощности;
2)двигателей-маховиков;
3)датчиков угловой скорости двигателей-маховиков;
4)датчиков углового перемещения микроспутника.
Статические характеристики усилителя мощности, двигателя-маховика, тахогенератора и датчика угла поворота пирамидальной платформы в общем виде можно представить следующими уравнениями:
56
1) |
усилитель мощности |
|
|
uум (t) = кумuз(t); |
(2.3) |
2) |
двигатель-маховик |
|
|
ω(t) = кдмuум (t); |
(2.4) |
3) |
тахогенератор |
|
|
uтг (t) = ктгω(t); |
(2.5) |
4) |
датчик углового перемещения микроспутника |
(2.6) |
|
ϕ(t) = кмсmу(t). |
В составе системы угловой стабилизации с маховичными органами управления все ее элементы, кроме двигателей-маховиков и объекта управления, – безынерционные звенья. Двигатель-маховик можно представить
апериодическим звеном первого порядка [3]: |
|
|
|
|
|
||||
W |
(s)= |
Ω(s) |
= |
кдм |
|
, |
(2.7) |
||
U |
|
(s) |
T s+ 1 |
||||||
дм |
|
ум |
|
|
|||||
|
|
|
|
|
дм |
|
|
||
а объект управления (микроспутник) – интегрирующим звеном второго порядка с передаточной функцией [3]:
W (s) = |
ϕ(s) |
|
= кмс . |
|
(2.8) |
||||
|
|
|
|||||||
мс |
|
|
Му |
(s) |
|
s2 |
|
|
|
|
|
|
|
|
|
||||
Эталонная модель объекта автоматической стабилизаци после структурных |
|||||||||
преобразований будет иметь такой вид: |
|
|
|
|
|
|
|
|
|
W(s)= |
Uду(s) |
= |
к0 |
, |
(2.9) |
||||
U |
з |
(s) |
s2(T s+1) |
||||||
|
|
|
|
|
дм |
|
|
||
где к0 = кумкдмкмскду.
Дифференциальное уравнение движения системы получают с помощью обратного преобразования Лапласа
Tдм |
d3uду(t) |
+ |
d2uду(t) |
= к0uз(t). |
(2.10) |
dt3 |
dt2 |
Для выполнения экспериментальных исследований эталонную модель удобно представить в дискретной форме, так как блоки диагностирования и управления в контуре системы автоматической стабилизации реализуются посредством цифровых вычислительных устройств. Первая, вторая и третья производные выходного сигнала объекта автоматической стабилизации в дискретной форме представлены формулами Эйлера:
duду(t) |
≈ |
uду(к = k +1)-uду(k) |
; |
(2.11) |
dt |
|
|||
|
Т0 |
|
||
|
57 |
|
|
|

|
|
|
d2u |
ду |
(t) |
≈ |
u |
ду |
(k +2)-2u |
ду |
(k +1)+u |
ду |
(k) |
; |
|
|
|
(2.12) |
|||||||
|
|
|
|
dt2 |
|
|
|
|
|
|
|
Т02 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
d3u |
ду |
(t) |
≈ |
|
u |
ду |
(k +3)-3u |
ду |
(k +2)+3u |
ду |
(k +1)-u |
ду |
(k) |
. |
(2.13) |
||||||||||
dt3 |
|
|
|
|
|
|
|
|
|
|
|
|
Т30 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
После подстановки выражений(2.11) – (2.13) в уравнение (2.10) получим
uду(k +3) = (3- TT0 ) uду(k + 2) +(3-
дм
|
T |
к T3 |
|
-(1- |
0 |
) uду(k)+ |
0 0 uз(k). |
|
|||
|
Tдм |
Tдм |
|
2T0 ) uду(k +1)-
Tдм (2.14)
Диагностический |
признак |
функционального |
|
состояния |
объекта |
|||||||||
автоматической стабилизации |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
uду(k + 3) = uˆ ду(k + 3) - uду(k + 3). |
(2.15) |
||||||||||
Тогда любая дестабилизация может быть обнаружена по отклонению (2.15) |
||||||||||||||
при использовании предикатного уравнения [4]: |
|
|
|
|
|
|||||||||
|
|
Z0 =s2{ |
|
uду(k +3) |
|
|
; ρ0 = 0,9, |
|
||||||
|
|
|
≥ δ0}; k =1,n0 |
(2.16) |
||||||||||
где δ0 – допуск на отклонение; |
|
|
|
|
|
|
|
|
|
|||||
n0 – количество измерений на интервале диагностирования; |
|
|||||||||||||
ρ0 – коэффициент доверия; |
|
|
|
|
|
|
|
|
|
|||||
uˆ ду(k + 3) |
– выходной |
параметр |
эталонной модели объекта автоматической |
|||||||||||
стабилизации; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uду(k + 3) |
– выходной параметр объекта автоматической стабилизации. |
|
||||||||||||
Отклонение |
контролируемого |
выходного |
параметра |
объекта |
||||||||||
автоматической стабилизации от его эталонной величины |
|
uду(k+3) |
|
≥ δ0 – это |
||||||||||
|
|
|||||||||||||
косвенный диагностический признак наличия дестабилизации. При этом параметру Z0 предикатного уравнения присваивается значение логической «1», что является стартовым условием для выполнения последующих процедур поиска места, установления класса и определения вида дестабилизации. Выполнение условия uду(k+3) < δ0 свидетельствует о нормальной работе
объекта автоматической стабилизации (параметру Z0 присваивается значение логического «0»).
Создание условий, близких к реальным, для экспериментальных исследований системы угловой стабилизации с электромаховичными приводами в пределах лаборатории – сложная задача, поэтому моделирование в среде
58
Simulink и экспериментальные исследования управления по диагнозу ограничиваются фрагментом действующего макетного образца системы автоматической стабилизации, а именно, одноканальным электромаховичным приводом.
2.4 Диагностирование и восстановление работоспособности электромаховичного привода
Виерархической схеме процесса диагностирования на верхнем уровне находятся диагностические модели, необходимые для обнаружения дестабилизации, а на нижнем – для определения вида дестабилизации.
Для реализации каждой из задач используют свой тип функциональных диагностических моделей (ФДМ), отражающих особенности задачи. Определение вида дестабилизации обеспечивается количеством доступных измерений и соответствующим характером входных воздействий [4].
Применение принципа управления по диагнозу позволяет при проектировании обеспечивать восстанавливаемость технических систем по отношению к потенциальному множеству видов дестабилизации [5].
Впроцессе проектирования разработка диагностических моделей и алгоритмического обеспечения процедур диагностирования и восстановления работоспособности – самостоятельные задачи [6,7].
Передаточная функция электромаховичного привода
|
|
U |
|
|
|
(s) |
|
кумкдмктг |
|
|
к |
|
|
|
|
|
|
W(s)= |
|
тг |
|
= |
|
= |
|
|
1 |
|
|
, |
(2.17) |
||
|
|
|
T s+1 |
T |
|
s+1 |
||||||||||
|
|
U |
з |
(s) |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
дм |
|
дм |
|
|
|
|
|
||
где к1 = кум кдм ктг. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
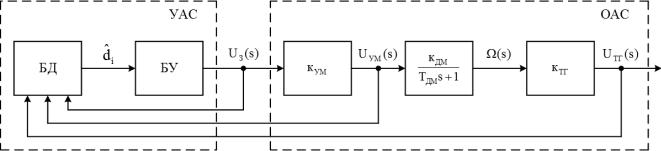
Структурная |
схема |
|
|
электромаховичного |
|
|
привода |
изображена |
||||||||
на рисунке 2.18. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.18 – Структурная схема электромаховичного привода
59