

Кафедра301 Рациональное управление объектами теория и приложения
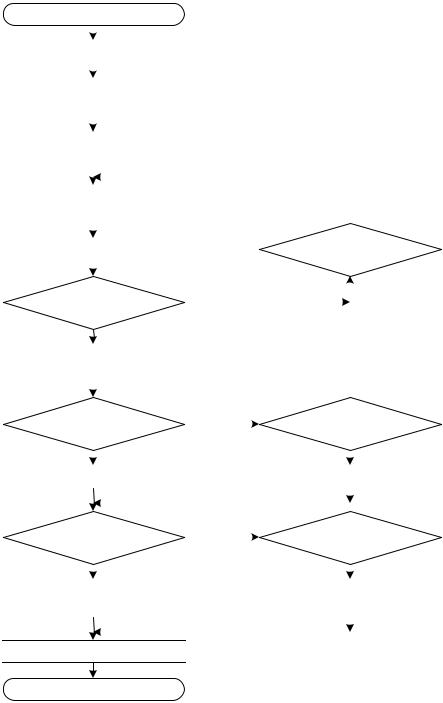
.pdfПри обнаружении дестабилизации электромаховичного привода (признак
дестабилизации |
|
uтг(k +1) |
|
≥ δ0 ) и поиска места дестабилизации |
усилителя |
||||
|
|
||||||||
мощности (признак дестабилизации |
|
uтг(k) |
|
≥ δ1) выполняют |
процедуру |
||||
|
|
||||||||
определения вида дестабилизации параметров усилителя мощности. Последовательность выполнения процедуры определения вида дестабилизации УМ регламентируется алгоритмом «Определение вида дестабилизации УМ».
Начало
Ввод данных: n;k;N;m;uЗ;кУМ;p
n:= 0; k: = 0; N: = 10; p: = 0,8;
m:= 0,9
uУМ (k) = uˆУМ (k)− uУМ (k)
n:= n+1
u |
УМ (k) ≥ uˆУМ (k) |
Нет |
n ≥ N |
Нет |
||||
|
|
|||||||
|
|
|
Да |
|
|
|
Да |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k: = k+1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нет
k ≥ pN
Да
Обрыв uПИТ |
|
Диагностирование УМ |
|
|
|
|
|
Анализ отказов и восстановление работоспособности
Конец
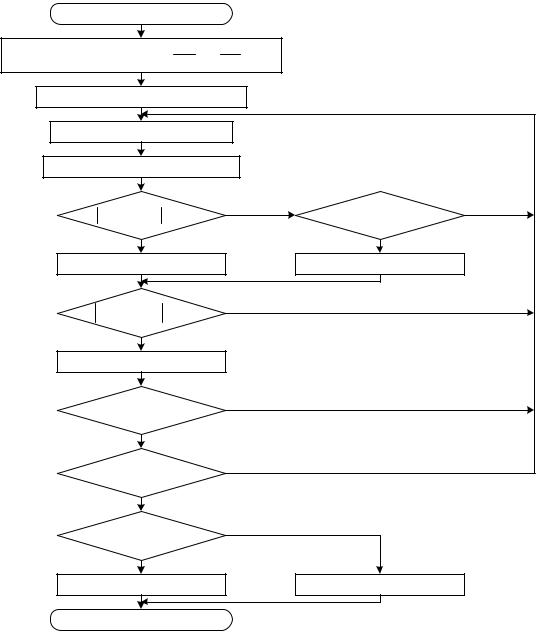
Рисунок 2.22 – Схема алгоритма определения обрыва Uпит
70
Техническая реализация процедуры определения обрыва питания возможна при наличии в базе данных следующих параметров:
1) p – коэффициент доверия;
2) кум – коэффициент передачи УМ;
3) n – текущее число измерений;
4) N – заданное число измерений в интервале диагностирования; 5) k – число измерений с признаком дестабилизации.
|
|
|
|
|
Начало |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ввод данных: кУМ;τ;n;N;δ;к1;к2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
τ := τ;кУМ := кУМ;к1 := 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
к2 := 0;N:= N; |
δ := 0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Вычисление uˆ |
З |
= 2τ |
−1;uˆ |
УМ |
= uˆ |
З |
к |
УМ |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Измерение uУМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
Вычисление |
uУМ |
= uˆУМ |
− uУМ |
|
|
|
|
|
|
|
|
Нет |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
n: = n+1 |
|
|
|
|
Нет |
|
|
n ≥ N |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
uУМ |
|
≥ δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Вычисление |
|
|
uЗ |
= |
uУМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
uПИТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нет |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
uУМ |
|
|
|
|
|
τ |
|
|
|
|
|
Нет |
|
|
uУМ |
|
|||||||||||
|
|
|
|
|
= |
|
|
|
|
|
|
|
= 1− |
τ |
|
|||||||||||||||||
|
|
|
|
uПИТ |
|
T |
|
|
|
|
|
|
|
|
|
|
uПИТ |
T |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
к1 := к1 + 1 |
|
|
|
|
|
|
|
|
|
|
к2 := к2 + 1 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к1 ≥ pN |
|
|
|
|
|
|
Нет |
|
|
к2 ≥ pN |
|
|
Нет |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Обрыв |
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обрыв |
|
1− |
|
τ |
|
|
||||
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 Диагностирование УМ
Диагностирование УМ 

Конец
Рисунок 2.23 – Схема алгоритма диагностирования отсутствия uз
71
Техническая реализация алгоритма диагностирования отсутствия задающего напряжения возможна при наличии в базе данных следующих параметров:
1)τ – длительность импульса ШИМ сигнала;
2)T – период ШИМ сигнала;
3)кум– коэффициент преобразования УМ;
4)ˆuз – эталонная величина задающего напряжения;
5)ˆuум – эталонная величина выходного напряжения УМ;
6)uум – величина выходного напряжения контролируемого УМ;
7)uум – величина дестабилизации выходного напряжения УМ;
8) n – текущее число измерений параметра uум ;
9)N – число всех измерений uум в интервале диагностирования;
10)к1 – число измерений с признаком обрыва цепи τ/T;
11) |
к2 – число измерений с признаком обрыва цепи |
T-τ |
; |
12) δ – допуск на отклонения от нормы параметра |
T |
|
|
uум ; |
|
||
13) |
p – коэффициент доверия. |
|
|
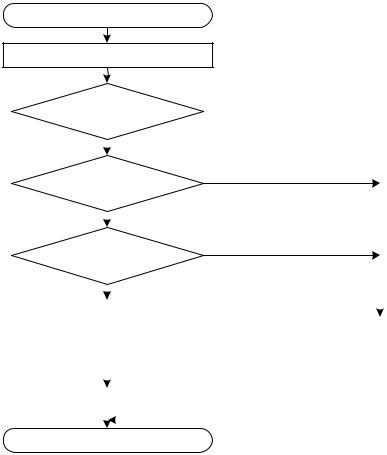
Техническая реализация алгоритма «Диагностирование кум» возможна при наличии в базе данных следующих параметров:
1)кум – коэффициент преобразования УМ;
2)ˆuз – эталонная величина задающего напряжения;
3)ˆuум – эталонная величина выходного напряжения УМ;
4)uум – величина выходного напряжения контролируемого УМ;
5)uум – величина дестабилизации выходного напряжения УМ;
6) |
n – текущее число измерений параметра uум ; |
|
|
|
7) |
N – предельное число |
всех измерений |
uум |
в интервале |
диагностирования; |
|
|
|
|
8) |
к– число измерений uум |
с признаком дестабилизации; |
|
|
9) |
δ – допуск на отклонения от нормы параметра |
uум ; |
|
|
10) p – коэффициент доверия.
72
Начало
Ввод данных: к;n;N;p;δ;uЗ(k)
к:= 0;n:= 0;N:= N;p:= p;
δ:= δ;uЗ(k):= uˆЗ
uУМ (k) = uˆУМ (k)− uУМ (k)
n:= n+1
|
|
|
uУМ (k) ≥ δ |
Нет |
|
n ≥ N |
Нет |
||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
Да |
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
к: = к+1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
УМ = |
|
|
|
uУМ (k) |
|
|
|
|
|
|
|||
|
|
|
|
uЗ |
(k) |
|
|
|
|
|
|
||||
Нет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кУМ |
|
≥ δ |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к ≥ pN |
|
Нет |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||
|
Дестабилизация кУМ |
|
|
Неопознанный отказ |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Анализ неисправностей и восстановление работоспособности
Конец
Рисунок 2.24 – Схема алгоритма диагностирования кум
73
Начало |
|
|
|
|
Ввод данных: |
|
|
|
|
кДМ;кТГ;ТДМ;Т0;к1 = 1,N;к2 |
= 1,N1;n = 1,M;δ1;δ2 |
|
|
|
к1 := 0;к2 := 0;N1 := N1;N2 := N2 |
|
|
||
Измерение uТГ (k);uДУ (k) |
|
|
|
|
Вычисление uТГ (k + 1);uДУ (k + 3) |
|
|
||
uТГ (k +1) ≥ δ1 |
Нет |
к1 ≥ 1 |
Нет |
|
|
|
|||
Да |
|
|
Да |
|
к1 := к1 + 1 |
|
n: = n+1 |
|
|
uДУ (k + 3) ≥ δ2 |
Нет |
|
|
|
|
|
|
||
Да |
|
|
|
|
к2 := к2 + 1 |
|
|
|
|
к1 ≥ N |
|
Нет |
|
|
|
|
|
|
|
Да |
|
|
|
|
к1 ≥ P1 ( N+ n) |
Нет |
|
|
|
|
|
|
||
Да |
|
|
|
|
к1 ≥ P2 ( N+ n) |
Да |
|
|
|
|
|
|
||
Нет |
|
|
|
|
Отказ ТГ |
|
Отказ ДМ |
|
|
Конец |
|
|
|
|
Рисунок 2.25 – Схема алгоритма диагностирования ДМ+ТГ |
||||
Исходные данные для реализации алгоритма «Диагностирование ДМ+ТГ»:
1)кум,Тдм,ктг – коэффициенты преобразования двигателя-маховика,
тахогенератора и постоянная времени двигателя-маховика;
2) T0 – период квантования, выбирают из условий Tдм >> Т0 ;
3) |
к1 |
– |
количество опросов |
с признаками |
дестабилизации параметра |
uтг (k +1) |
; |
|
|
|
|
4) |
N1 |
– |
заданное количество |
измерений с |
признаками дестабилизации |
uтг (k +1) |
, достаточное для принятия решения о наличии отказа; |
||||
|
|
|
|
74 |
|
5) n1 – количество измерений с признаком «Норма» параметра uтг (k +1) в интервале диагностирования;
6)к2 – количество опросов с признаком «Не норма» параметра uду(k + 2);
7)n2 – количество опросов с признаком «Норма» параметра uду(k + 2) на
интервале диагностирования;
8)N1 +n1 – интервал диагностирования;
9)p1 – коэффициент доверия результатов диагностирования параметра
uтг (k +1);
10)p2 – коэффициент доверия результатов диагностирования параметра
uду(k + 2);
11)uтг (k +1) – выходное напряжение тахогенератора;
12)uду(k + 2) – выходное напряжение датчика углового перемещения
объекта (платформы).
Начало
Анализ признака отказов УМ
|
|
Отказ |
Да |
||||||
|
|
uПИТ |
|
|
|
|
|||
|
|
|
|
Нет |
Да |
|
|||
|
|
|
|
||||||
|
|
|
|
||||||
|
|
Отказ |
|
||||||
|
|
uЗ |
|
|
|
|
|||
|
|
|
|
Нет |
Нет |
|
|||
|
|
|
|
||||||
|
|
|
|
||||||
|
Дестабилизация кУМ |
|
|||||||
|
|
|
|
|
|||||
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
Вычислить приращение |
|
|
|
|
||||
|
|
|
|
|
|||||
|
uЗ = |
uУМ (k)uЗ(k) |
|
|
Откл. УМОСН |
||||
|
|
|
|
|
|
|
Вкл. УМРЕЗ |
||
|
uˆУМ (k)− uУМ (k) |
|
|
||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
УстановитьuЗ (k) = uЗ (k)+ |
uЗ |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Конец |
|
|
|
|
|||
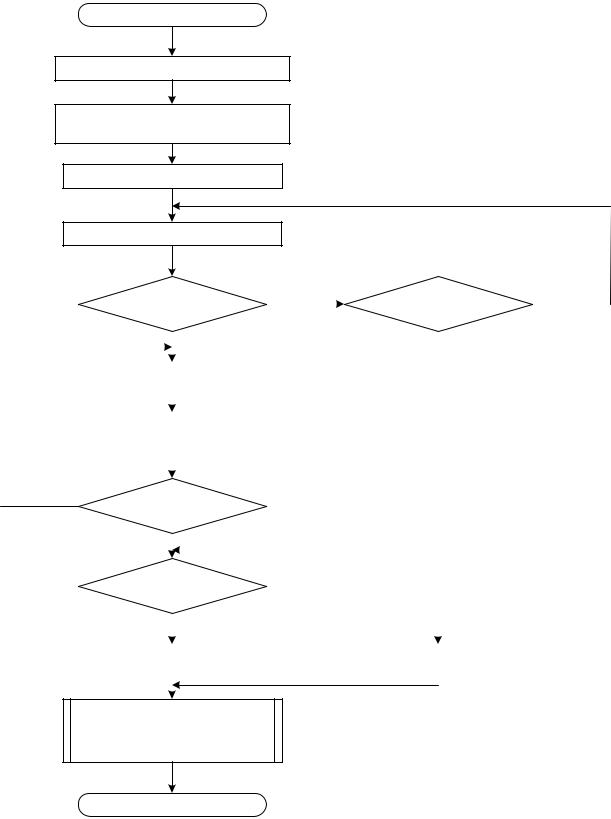
Рисунок 2.26 – Схема алгоритма восстановления работоспособности при дестабилизации параметров усилителя мощности
75
2.6 Моделирование алгоритмов диагностирования и восстановления работоспособности электромаховичного привода
Методы диагностирования и восстановления работоспособности электромаховичного привода исследовали в среде Simulink при выполнении следующих операций:
1)моделирование движения в номинальных и нештатных режимах функционирования;
2)введение в функциональные элементы дестабилизирующих воздействий;
3)диагностирование работоспособности с глубиной до вида дестабилизирующего воздействия;
4)восстановление работоспособности с использованием избыточных ресурсов;
5)визуализация параметров, отражающих физическое состояние привода. Разработанную модель реализуют с помощью модели электромаховичного
привода и его эталонной модели, блока обнаружения, поиска места, определения вида дестабилизации и блока восстановления работоспособности.
Электромаховичный привод – это исполнительный элемент в составе системы автоматической стабилизации малого космического аппарата. Управляющий момент, создаваемый маховичным механизмом, формируют в промежутке времени изменения угловой скорости двигателя-маховика. В режиме постоянной угловой скорости маховичный механизм на состояние объекта управления влияния не оказывает. По этой причине основное внимание при исследованиях уделяли переходным процессам при работе привода в номинальных и нештатных режимах функционирования.
Работу по исследованию функционирования электромаховичного привода в среде Simulink условно подразделяют на два этапа.
На первом этапе рассматривали и анализировали поведение только выходного сигнала uтг (t) при изменении коэффициентов преобразования усилителя мощности, двигателя-маховика, тахогенератора, питающих напряжений и постоянной времени двигателя-маховика.
На втором – была решена основная задача – обеспечение глубины диагностирования до определения вида дестабилизации и восстановления работоспособности вследствие имеющихся избыточных ресурсов.
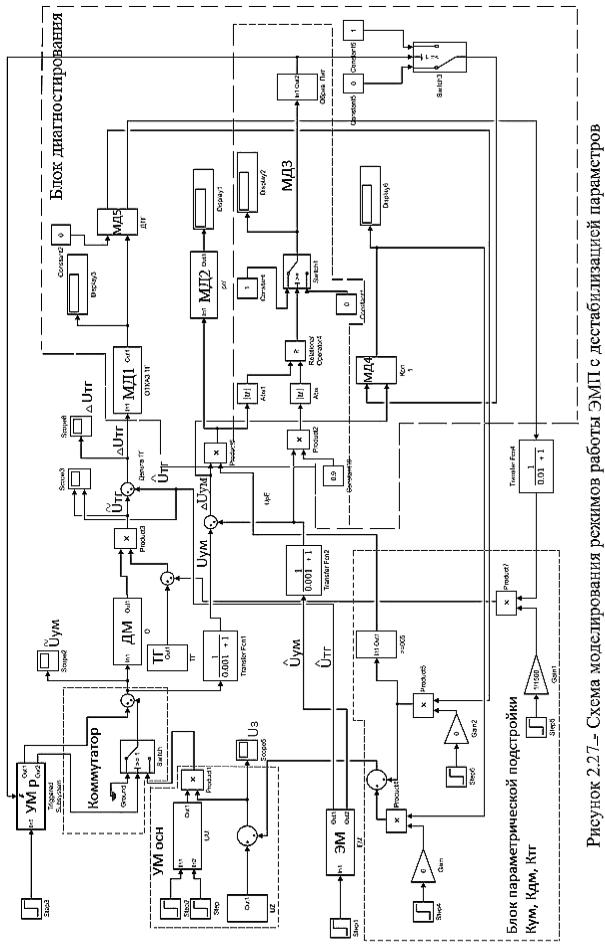
На рисунке 2.27 показана полная блок-схема моделирования движения электромаховичного привода в номинальных и нештатных режимах функционирования.
76
Блок-схема содержит:
1)модель электромаховичного привода;
2)эталонную модель электромаховичного привода (ЭМ);
3)модель блока диагностирования (БД);
4)модель коммутатора;
5)модель блока параметрической подстройки.
Модель электромаховичного привода представлена отдельными элементами: усилителями мощности – основным (УМОСН) и резервным (УМР), двигателем-маховиком (ДМ) и тахогенератором (ТГ).
Эталонная модель электромаховичного привода приведена одним элементом (ЭМ).
Блок диагностирования состоит из модулей диагностирования (МД), которые обеспечивают последовательное диагностирование от обнаружения наличия дестабилизации до места и вида дестабилизации.
Блок параметрической подстройки компенсирует дестабилизацию параметров усилителя мощности, двигателя маховика, тахогенератора.
Для исследования режимов функционирования в нештатных ситуациях в конструкцию модели электромаховичного привода (рисунок 2.28) введены дополнительные блоки, позволяющие в любой момент времени вводить дестабилизацию.
Так, для моделирования нештатной работы усилителя мощности в модель введены элементы дестабилизации задающего сигнала uз(t) и коэффициента преобразования кум.
Моделирование нештатной работы двигателя-маховика реализуется аналогично: путем дестабилизации коэффициента преобразования кдм и
постоянной времени Tдм .
Модель тахогенератора позволяет изменять его коэффициент преобразования ктг .
Эталонная модель реализована передаточной функцией соединения «УМ+ДМ+ТГ».
Контролируемые параметры электромаховичного привода и эталонной
модели: выходное напряжение усилителя мощности uум (t) |
и напряжение uтг (t) |
||
на выходе тахогенератора. |
ˆ |
|
ˆ |
Отклонение сигналов |
|
||
ΔUум(t)= Uум(t)-Uум(t) |
и ΔUтг(t)=Uтг(t)-Uтг(t), |
||
поступающих в блок диагностирования, в котором осуществляется обработка сигналов в целях выявления причин дестабилизации.
77
78
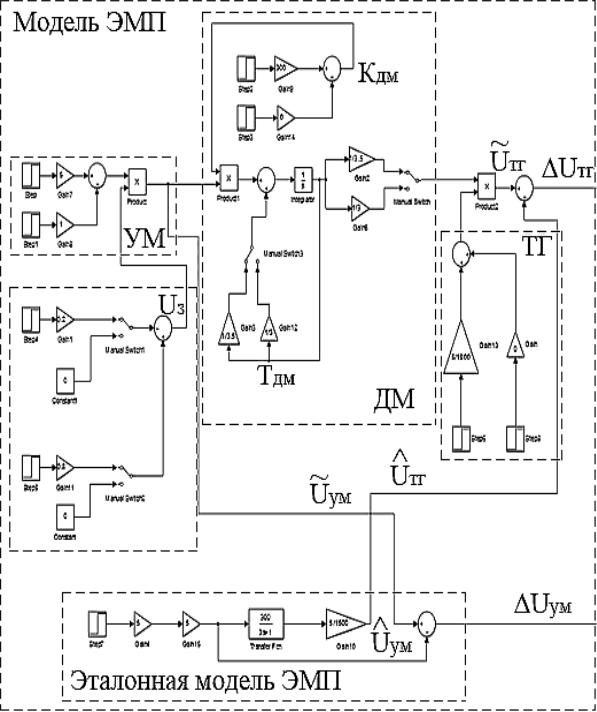
Рисунок 2.28 – Модель электромаховичного привода и эталонная модель
Структура блока диагностирования состоит из модулей диагностирования, каждый из которых имеет свое функциональное назначение в иерархии процедуры идентификации дестабилизации: обнаружение, поиск места и определение вида дестабилизации.
Модули диагностирования соединяются в процессе диагностирования в зависимости от дестабилизирующего воздействия.
79