

1. Основные определения и классификация систем логического управления.
Данные САУ применяются для управления процессами и оборудованием с циклическим режимом работы (пуск и остановка сложных технологических систем, логическая последовательность действий узлов, механизмов, транспортеров и т. п.), сигнализация). В таких системах информация поступает от элемента к элементу в дискретном виде.
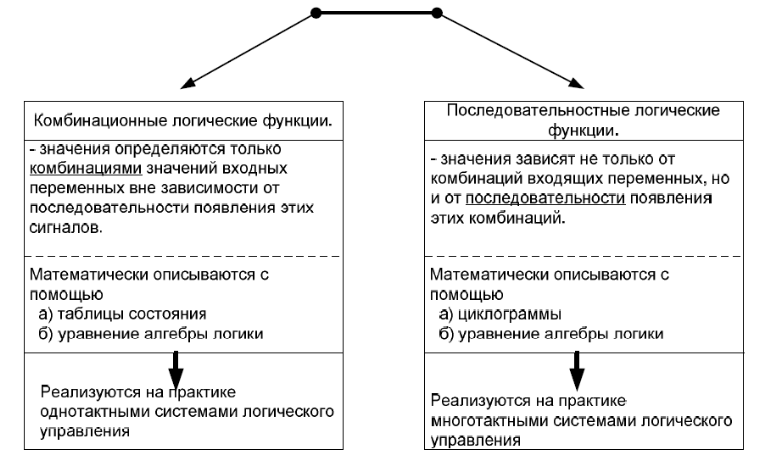
По способу действия системы логического управления (СЛУ)
классифицируют:
2. Показатели качества сау.
При эксплуатации САУ ее устойчивость (см. 3.3.1.) является необходимым условием её работоспособности. Достаточным условием является обеспечение показателей качества процесса регулирования, которые определяются из переходного процесса, т.е. процесса при котором ОУ переходит из одного режима в другой.
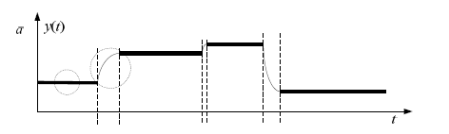
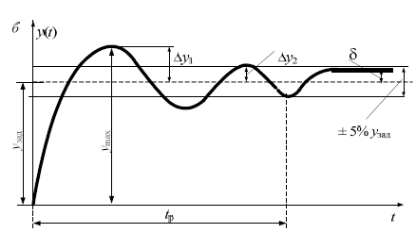
Рис. 3.1. Типичная временная диаграмма работы технологического
оборудования. Жирными горизонтальными линиями обозначены участки работы
оборудования при заданном режиме (y – любая технологическая переменная), а
тонкой – переходные процессы, осуществляемые САУ для перевода (перехода)
ОУ из одного заданного режима в другой б) типичный вид переходного процесса
с указанием его основных характеристик
Показатели качества САУ оцениваются следующими основными количественными характеристиками переходного процесса:
а) время регулирования tр – время, в течении которого, начиная с момента приложения воздействия к системе, отклонение регулируемой величины y(t) отличается от нового установленного, т.е. yзад на ± 5 %.
Характеризует быстродействие системы: чем меньше tр, тем лучше система реагирует на изменение задания и внешние возмущения.
б) перерегулирование σ – отношение величины первого отклонения (от заданного значения) к заданному значению yзад
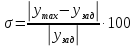
Перерегулирование не должно превышать 10-30%. Характеризует колебательность системы.
в) статическая ошибка (точность) δ – величина отклонения установившегося значения регулируемой величины y(∞) от заданного yзад (её ещё называют остаточным отклонением)
δ = yзад – y(∞) .
Характеризует точность системы: чем меньше δ, тем точнее система устанавливает выходную переменную y на заданное значение yзад.
г) колебательность m – число колебаний регулируемой величины за время переходного процесса.
д) степень затухания φ – отклонение разности двух соседних амплитуд колебаний направленных в одну сторону к первой из них
при φ = 0 – возникают незатухающие колебания с постоянной амплитудой,
при φ = 1 – переходный процесс стремится к апериодическому (т.е. без колебаний).
Это прямые оценки определения качества: по графику переходного процесса, снятого экспериментально. Его не всегда можно получить, поэтому используют косвенные оценки (без построения графика).
1. Интегральный метод – без решения дифференциальных уравнений системы:
а) без перерегулирования
б) колебательный
Чем меньше критерии I1 и I2, тем лучше. Оценка качества САУ происходит по площади, заключённой между кривой переходного процесса и осями координат (д.б. минимальной).
2. Частотный метод: по вещественной частотной характеристике системы Re.