1 Математическое описание работы сау с помощью временных и частотных характеристик
Временная характеристика - зависимость от времени t выходной переменной y(t) при подаче на вход объекта управления x(t) типового воздействия (скачок и импульс).
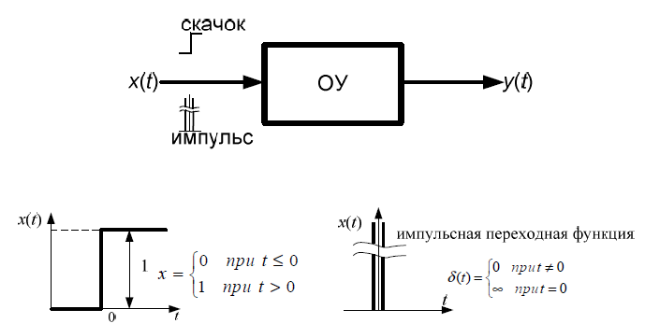
а) скачок - единичное ступенчатое входное воздействие x(t), которое часто возникает в системе при её включении (отключении) и/или резком изменении заданного режима.
Если скачок приложен к системе в течение всего времени ее перехода из одного устойчивого состояния в другое, то временную характеристику называют переходной функцией, а её графическое изображение - переходной характеристикой.

где х(р) - скачок на входе x(t) = 1{t) , учитывая, что изображение ступенчатой функции равно
1 /р, получим:
![]()
Для отыскания оригинала (т.е. значение во временной области) используют специальные таблицы.
б) импульс —мгновенное (кратковременное) изменение входного воздействия x(t). Используется для имитации возмущающего воздействия на систему. Для его описания используют δ-функции.
Частотные характеристики
Для определения динамических свойств системы на ее вход подают гармонические колебания вида
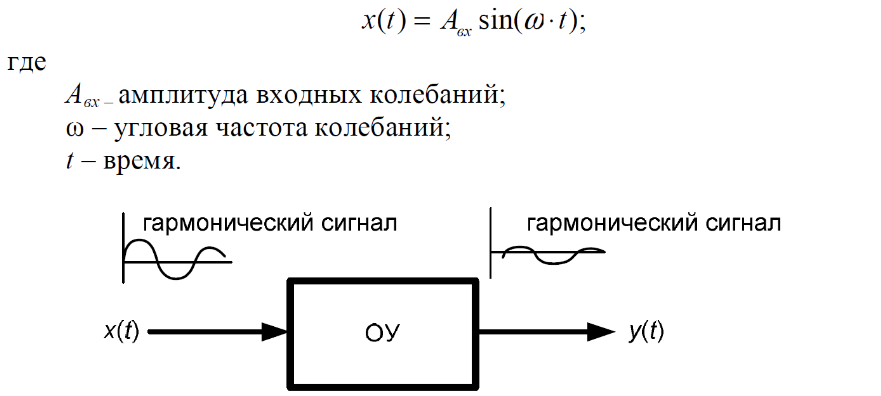
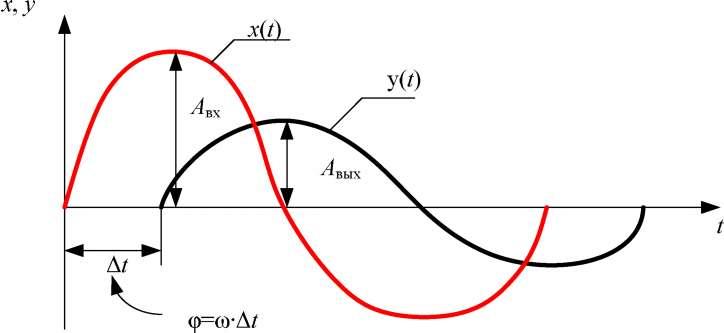
Если САУ линейная, то на её выходе также устанавливаются синусоидальные колебания с частотой со, но с амплитудой Авых и сдвинутые по фазе относительно входного сигнала на угол ср:
![]()
Параметры Авых и ср зависят от частоты и амплитуды входных сигналов и динамических свойств системы. Знак «минус» перед ср обусловлен тем, что в реальных системах выходное колебание отстаёт по фазе от входного.
Запишем переменные х и у в комплексной форме:
Поведение динамической системы характеризуют частотные характеристики.
2 Структурные схемы сау
Передаточные функции отдельных блоков (звеньев) на основе типовых элементарных динамических звеньев образуют структурную схему САУ, являющуюся динамической моделью системы. Т.е. для её получения надо каждый элемент САУ заменить соответствующим динамическим звеном и соединить в той же последовательности.
Графически структурная схема изображается в виде прямоугольников, внутри которых записываются передаточные функции звеньев. Связи между звеньями обозначаются линиями со стрелками, указывающими направление передачи информации.
![]()
а) в общем виде; б) конкретизировано: апериодическое звено 1-го порядка
Звенья, образующие структурные схемы, могут быть соединены:
а) последовательно;
б) параллельно;
в) с обратной связью.
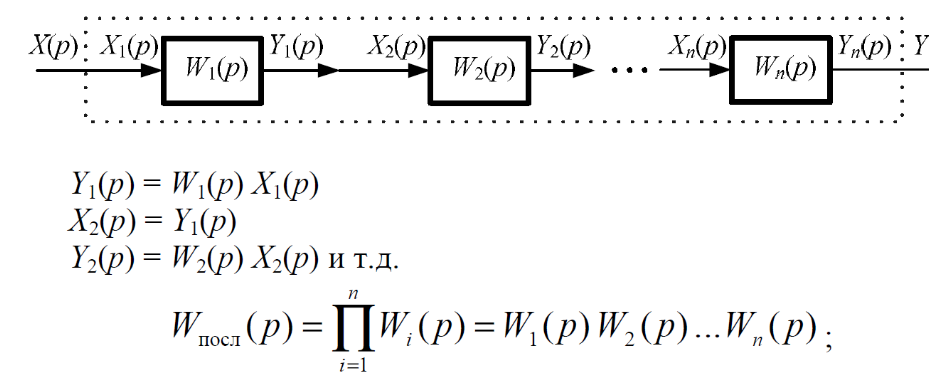
Последовательное соединение звеньев - выход каждого звена связан с входом следующего.
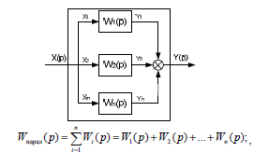
Параллельное соединение звеньев - входные сигналы на все звенья одинаковыХ(р) = Х1(р) = Х2(р) = ... = Х„(р), а выходящий равен сумме выходных сигналов Y(p) = Y1(p) + Y2(p) + ... + Y„(p)
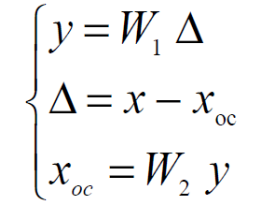
Соединение звеньев с обратной связью - выходной сигнал посредством обратной связи возвращается на вход системы.
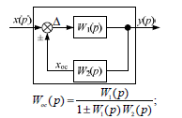
В этой формуле знак «плюс» соответствует отрицательной обратной связи, а знак «минус» - положительной. Для вывода уравнения соединения с ОС составляется система уравнений (случай с отрицательной обратной связью) и решается относительно соотношения у(р)/х(р)