

Частотный метод синтеза регуляторов для систем с распределенными параметрами Постановка задачи синтеза
Для заданного распределенного объекта (известна его математическая модель, либо имеется сам объект управления, на котором можно проводить экспериментальные исследования) синтезировать регулятор, стабилизирующий функцию выхода. При этом на статическую ошибку и на запасы устойчивости разомкнутой системы наложены следующие ограничения:
-
статическая ошибка
 ;
; -
запас по модулю
 ;
; -
запас по фазе
 ;
; -
при решении задачи синтеза будем полагать, что входное воздействие представимо в виде ряда
![]() ,
,
здесь
![]() - заданные числа;
- заданные числа;
![]() - коэффициенты разложения входного
воздействия в ряд Фурье;
- коэффициенты разложения входного
воздействия в ряд Фурье;
![]() - переменные, представляющие собой
комбинацию тригонометрических функций.
- переменные, представляющие собой
комбинацию тригонометрических функций.
Процедура синтеза
Процедура синтеза регуляторов распределяется на следующие этапы:
1. Для выбранных значений ,
![]() строим
частотные характеристики объекта,
полагая, что их число равно
строим
частотные характеристики объекта,
полагая, что их число равно
![]() .
Определим интервал изменения обобщенной
координаты G:
.
Определим интервал изменения обобщенной
координаты G:
![]() ,
,
![]() .
.
Рекомендуется значения
![]() ,
для которых строятся частотные
характеристики объекта, выбирать таким
образом, чтобы интервал
,
для которых строятся частотные
характеристики объекта, выбирать таким
образом, чтобы интервал
![]() разбивался функциями
разбивался функциями
![]() на
на
![]() равных, по возможности, частей
равных, по возможности, частей
В рассматриваемом случае, для сохранения
ясности построений, выберем
![]() ;
;
![]() ;
;
![]()
![]() .
Частотные характеристики объекта
приведены на рис. 4.1.а, г, кривые 1,2.
.
Частотные характеристики объекта
приведены на рис. 4.1.а, г, кривые 1,2.
2. По построенным частотным характеристикам объекта строим график статической кривой (рис. 4.1.б, кривая 1).
3. На плоскость
![]() наносим график желаемого статического
коэффициента усиления разомкнутой
системы (выбор значения K
приведен в п.4.1):
наносим график желаемого статического
коэффициента усиления разомкнутой
системы (выбор значения K
приведен в п.4.1):
![]() ,
,
![]() ,
(рис. 4.1.б, кривая 4).
,
(рис. 4.1.б, кривая 4).
4. Вычитая графически из желаемого статического коэффициента усиления разомкнутой системы статический коэффициент усиления объекта, получим график желаемого статического коэффициента усиления регулятора (рис. 4.1.б, кривая 2).
5. Для реализации желаемого коэффициента усиления регулятора используем распределенный блок. Передаточная функция распределенного блока имеет вид:
 ,
,
где
![]() ,
,
![]() ,
,
![]() - заданное число.
- заданное число.
Определяя по графику (рис. 4.1.б, кривая
2) величины статических коэффициентов
усиления
![]() в точках
в точках
![]()
![]() и подставив их в (3.40), вычислим значения
вектора E:
и подставив их в (3.40), вычислим значения
вектора E:
![]() .
.
6. Строим график коэффициента усиления синтезированного регулятора (рис. 4.1.б, кривая 3):
 .
.
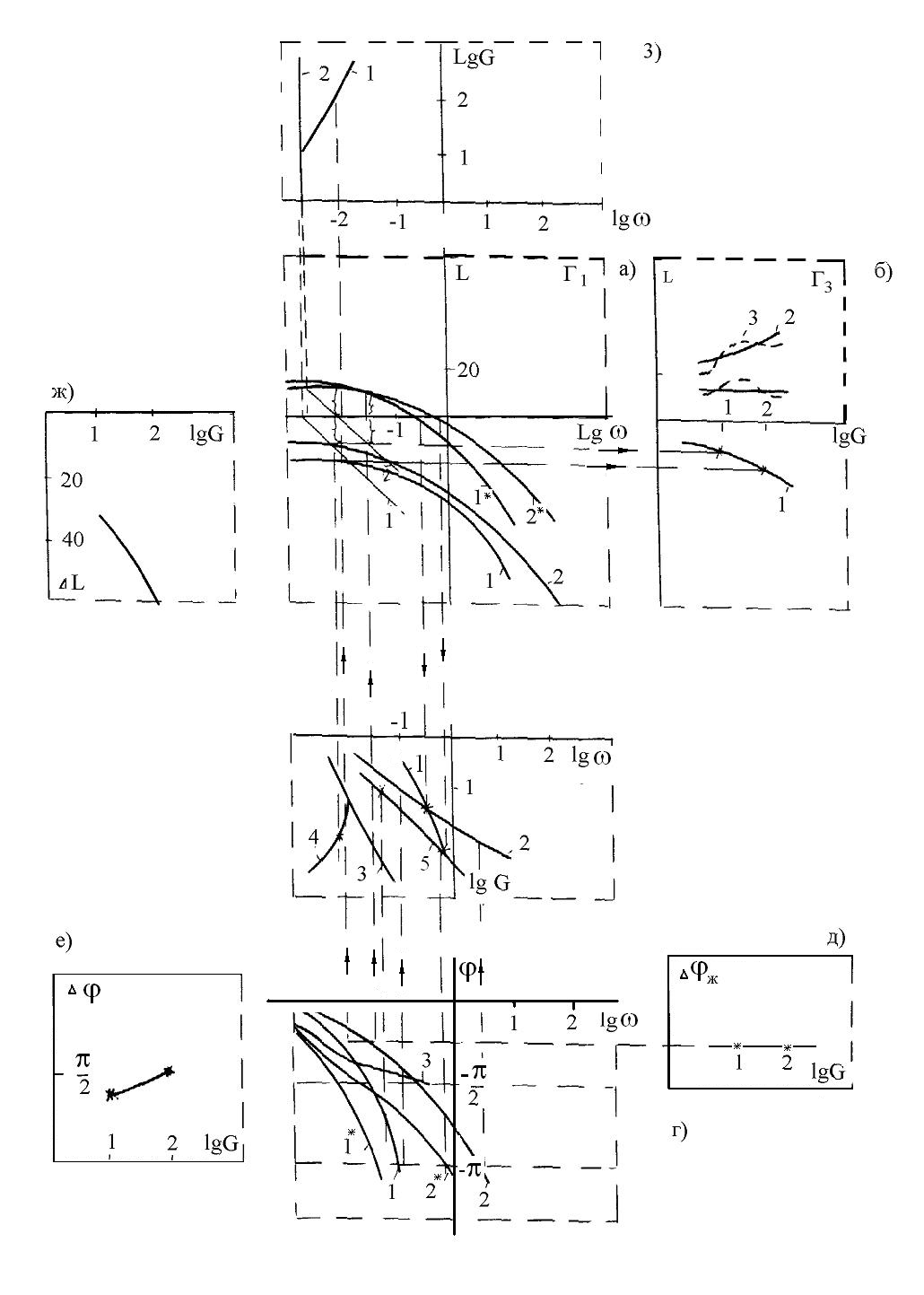
Рис 4.1. Синтез регулятора.
7. Складывая графически статический коэффициент усиления найденного регулятора и статическую кривую объекта, получим график статического коэффициента усиления разомкнутой системы (рис. 4.1.б, кривая 5).
8. Используя график статического коэффициента усиления разомкнутой системы, строим графики амплитудных частотных характеристик системы (рис. 4.1.а, кривые 1*, 2*) и графики линий модуля и фазы (рис. 4.1.в, кривые 1, 2).
По построенным графикам анализируем устойчивость системы. При этом возможны следующие случаи:
-
система устойчива и запасы по модулю и по фазе не менее заданных;
-
система устойчива, но запасы по модулю и по фазе менее заданных;
-
система неустойчива.
В первом случае процедура синтеза закончена. В остальных необходимо применение дополнительных корректирующих звеньев. В качестве корректирующих звеньев могут быть использованы распределенные блоки, передаточные функции которых рассмотрены ранее. В некоторых частных случаях могут применяться и стандартные звенья сосредоточенных систем.
Из построенных на рис. 4.1, в. графиков следует, что замкнутая система, согласно критерию Найквиста, будет неустойчива.
В качестве корректирующего устройства будем использовать, для простоты изложения, апериодическое звено, передаточная функция которого имеет вид
![]() .
.
Процесс выбора постоянной времени (![]() )
корректирующего звена может носить
итерационный характер.
)
корректирующего звена может носить
итерационный характер.
Для первой итерации положим, что сдвиг
по фазе корректирующего звена равен
![]() .
.
9. Строим график желаемого запаса устойчивости по фазе разомкнутой системы (рис.4.1.д).
10. Используя график
![]() и фазовые характеристики разомкнутой
системы, построим график желаемой линии
среза модуля разомкнутой системы (рис.
4.1.в, кривая 3).
и фазовые характеристики разомкнутой
системы, построим график желаемой линии
среза модуля разомкнутой системы (рис.
4.1.в, кривая 3).
11. Определим кривую частоты среза корректирующего звена. Для этого из точек, лежащих на кривой 3 (рис. 4.1.в) и помеченных *, проводим вертикальные прямые до пересечения с амплитудными характеристиками (объект + регулятор). Полученные точки пересечения зеркально отображаем относительно оси lg и через отображенные точки проводим прямые под наклоном (-20 дб/дек). Точки пересечения указанных прямых с осью lg переносим в плоскость lgG, lg и соединяем их кривой (рис. 4.1.з, кривая 1), получим желаемую линию частоты среза корректирующего звена.
12. Так как корректирующее звено ищется
в виде апериодического звена, то выберем
такое значение постоянной времени
![]() ,
чтобы график желаемой линии частоты
среза корректирующего звена располагался
на плоскости lgG,
lg
правее прямой
,
чтобы график желаемой линии частоты
среза корректирующего звена располагался
на плоскости lgG,
lg
правее прямой
![]() .
.
Таким образом, получим график линии
частоты среза корректирующего звена
(рис. 4.1.з, кривая 2). (Если наложены условия
на близость графиков желаемой линии
частоты среза и линии частоты среза
корректирующего звена, то их выполнения
добиваются посредством применения для
корректировки распределенных звеньев
или распределенных блоков.) Из полученного
графика линии частоты среза корректирующего
звена определяем значение
![]()
13. По найденным параметрам корректирующего звена, используя частотные характеристики системы «объект + регулятор», строим частотные характеристики скорректированной разомкнутой системы «объект + регулятор + корректирующее звено». Амплитудные характеристики приведены на рис. 4.1.а, кривые 1, 2; фазовые характеристики – на рис. 4.1.г, кривые 1, 2 (фазовая характеристика корректирующего устройства представлена кривой 3).
14. Используя частотные характеристики разомкнутой скорректированной системы, строим графики линий среза модуля и фазы (рис. 4.1.в, кривые 4, 5).
15. По построенным характеристикам
оцениваем запасы по модулю и по фазе
(рис. 4.1.е, ж). Если полученные запасы по
модулю менее заданных, то их корректировку
обеспечивают изменением значения
![]() (смещая график прямой 2, рис. 4.1.з).
(смещая график прямой 2, рис. 4.1.з).