

Вопрос 6. Основной закон динамики вращательного движения твердого тела.
Опыт показал, что при вращении тела, например закручивании болта гаечным ключом, существенным оказывается понятие момента силы, а не только модуля силы и длины рычага. Вектором момента силы относительно точки О (рис. 3.3) называют вектор М, модуль которого равен произведению модуля силы F на ее плечо I
М = Frsina = Fℓ, Н·м.
М омент
силы относительно неподвижной
точки О представляет векторное
произведение радиуса-вектора
омент
силы относительно неподвижной
точки О представляет векторное
произведение радиуса-вектора
![]() точки
приложения силы на
силу
точки
приложения силы на
силу
![]() :
.
:
.![]() =
[
=
[![]()
![]() ].
Радиус-вектор г, проведенный из точки
О в точку приложения силы, и сила F
лежат
в плоскости рисунка.
Вектор момента силы
].
Радиус-вектор г, проведенный из точки
О в точку приложения силы, и сила F
лежат
в плоскости рисунка.
Вектор момента силы
![]() перпендикулярен
плоскости рисунка. Его направление
определяется по правилу правого винта.
Поворот головки винта в направлении
силы вызывает перемещение
винта в направлении вектора момента
силы. В данном
случае вектор
перпендикулярен
плоскости рисунка. Его направление
определяется по правилу правого винта.
Поворот головки винта в направлении
силы вызывает перемещение
винта в направлении вектора момента
силы. В данном
случае вектор
![]() момента силы направлен от нас и изображен
на рисунке 3.3 кружком с крестиком. Точка
О
находится
в центре кружка.
момента силы направлен от нас и изображен
на рисунке 3.3 кружком с крестиком. Точка
О
находится
в центре кружка.
Плечом силы называют длину перпендикуляра, опущенного из точки О на прямую, вдоль которой действует сила.
Если
сила приложена к одной из точек
твердого тела, то вектор
![]() характеризует
способность силы вращать тело
вокруг точки О.
В
реальных условиях под действием силы
твердое тело
вращается вокруг оси, проходящей
через точку О.
При
этом все точки
тела описывают окружности с центрами
на этой оси и имеют одинаковую угловую
скорость ω = dφ/dt
и
одинаковое ускорение ε = dω/dt.
Проекция
вектора
характеризует
способность силы вращать тело
вокруг точки О.
В
реальных условиях под действием силы
твердое тело
вращается вокруг оси, проходящей
через точку О.
При
этом все точки
тела описывают окружности с центрами
на этой оси и имеют одинаковую угловую
скорость ω = dφ/dt
и
одинаковое ускорение ε = dω/dt.
Проекция
вектора
![]() на
неподвижную ось z
является
скалярной физической величиной и
называется моментом силы относительно
оси z
(рис.
3.4): Mz=
[
на
неподвижную ось z
является
скалярной физической величиной и
называется моментом силы относительно
оси z
(рис.
3.4): Mz=
[![]()
![]() ].
Значение момента Мг
не
зависит от выбора положения точки О
на
оси z.
].
Значение момента Мг
не
зависит от выбора положения точки О
на
оси z.
Моментом инерции тела относительно оси вращения z называют сумму произведений масс п материальных точек этого тела на квадраты их расстояний до этой оси
![]() кг·м2.
кг·м2.
Указанную сумму можно свести к интегралу J=∫r2dm . Здесь величину r следует понимать как функцию положения точки с координатами х, у, z.
П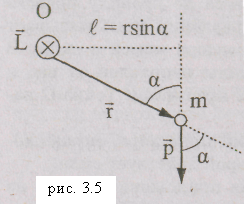 о
аналогии с моментом силы можно получить
еще одну важную
векторную характеристику вращающейся
материальной
точки — момент импульса материальной
точки относительно точки О.
о
аналогии с моментом силы можно получить
еще одну важную
векторную характеристику вращающейся
материальной
точки — момент импульса материальной
точки относительно точки О.![]() ,
где
,
где
![]() - радиус-вектор, определяющий положение
материальной точки относительно точки
О, а
- радиус-вектор, определяющий положение
материальной точки относительно точки
О, а
![]() —
импульс этой материальной
точки. Модуль момента
импульса материальной точки можно
представить в виде произведения
L
=
rpsina
=
рℓ, Дж·с.
—
импульс этой материальной
точки. Модуль момента
импульса материальной точки можно
представить в виде произведения
L
=
rpsina
=
рℓ, Дж·с.
Если материальная точка движется прямолинейно, то модуль момента импульса равен L = mvl, при движении материальной точки по окружности радиусом R момент импульса относительно центра окружности равен L = mvR.
Момент импульса твердого тела относительно оси z представляет собой сумму моментов импульса отдельных частиц
![]() , Дж·с.
, Дж·с.
Используя
формулу
![]() получим
получим
![]() ,
то
есть
,
то
есть
Lz=Jzω, Дж·с. (1)
Следует обратить внимание на то, что у ω индекс не ставится, так как эта величина одинакова для всех точек тела.
Итак, момент импульса твердого тела относительно оси z равен произведению момента инерции тела относительно той же оси на его угловую скорость.
Продифференцируем
уравнение (1) по времени
![]()
Момент силы относительно оси z может быть преобразован к виду:
![]()
Таким
образом, dLz/dt
=
M
. Наряду с изложенным, имеет место
векторное равенство
![]() .
.
Из равенства Мz =Jz dw /dt с учетом того, что dw/dt представляет собой угловое ускорение, следует основной закон динамики вращательного движения твердого тела относительно неподвижной оси Мz= Jze, H • м.
Очевидно, что угловое ускорение, сообщаемое телу моментом силы, тем больше, чем меньше момент инерции, то есть момент инерции характеризует инерционные свойства тела при вращательном движении. Но в отличие от массы, момент инерции конкретного тела может иметь множество значений соответственно множеству возможных осей вращения.
Кинетическая энергия одной частицы массой тi вращающегося, тела, движущейся со скоростью vi по окружности радиусом ri , равна:
Eki= тi vi2/2 = тi ri2w2/2= Jiw2/2, Дж,
где Ji — момент инерции материальной, точки; w — угловая скорость вращения тела. Суммируя энергии Екi всех материальных точек, получим формулу для кинетической энергии тела, вращающегося вокруг неподвижной оси z: Ek= Jzw2/2, Дж.
В технике для равномерного хода прокатных станов, кораблей, тракторов и других машин широко используют маховое колесо, аккумулирующее кинетическую энергию вращения вала. К сведению, скорость вращения композитных роторных устройств (маховиков в том числе) достигает 600 тыс. оборотов в минуту. Это чрезвычайно высокая скорость. Прочность, необходимая при этом, обеспечена композитом.
Если тело одновременно участвует в поступательном и вращательном движениях, то его кинетическая энергия определяется следующим образом:
Ek = mv2/2 + Jzw2/2, Дж.
Работа
вращающего момента силы, приложенной
к телу, равна
изменению кинетической энергии тела А
=
Jz![]() /2
— Jz
/2
— Jz
![]() /2,
Дж.
/2,
Дж.