

Общая схема метода Гаусса для систем, имеющих единственное решение
Пусть
![]() .
(В противном случае в качестве первого
уравнения возьмем какое-либо другое).
Разделим первое уравнение на
.
(В противном случае в качестве первого
уравнения возьмем какое-либо другое).
Разделим первое уравнение на
![]() .
.
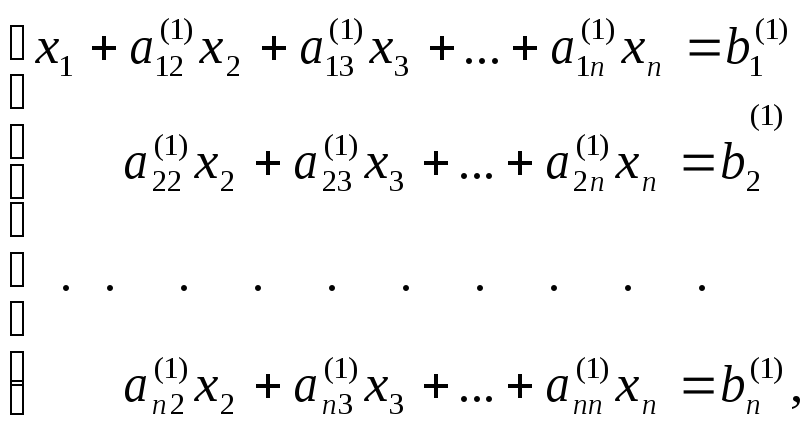
Получим
![]() ,
(4)
,
(4)
где
![]() ;
;
![]()
![]() ,
,
![]()
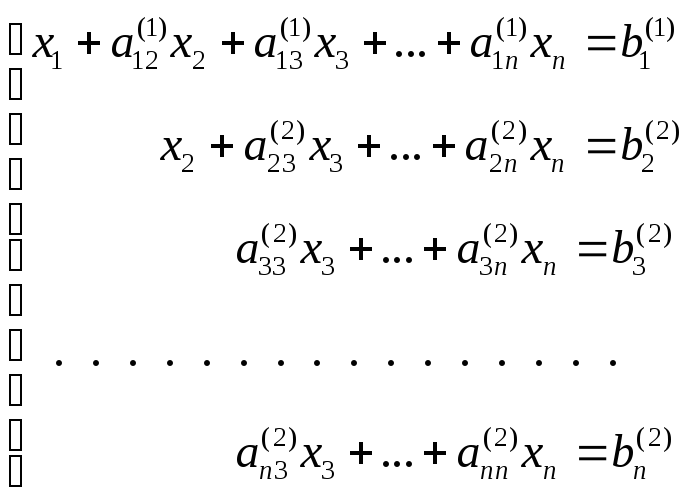
Умножим разрешающее уравнение (4) на
![]() и вычтем полученное уравнение из второго
уравнения системы (3). Аналогично
преобразуем остальные уравнения. Система
примет вид
и вычтем полученное уравнение из второго
уравнения системы (3). Аналогично
преобразуем остальные уравнения. Система
примет вид
 (5)
(5)
где
![]()
![]()
![]()
![]()
![]()
Если какой-либо из коэффициентов
![]() окажется
равным нулю, то j-ое
уравнение системы (3) войдет в систему
(5) без изменений т.е.
окажется
равным нулю, то j-ое
уравнение системы (3) войдет в систему
(5) без изменений т.е.
![]()
![]()
![]()
(То есть если в какой-либо из уравнений
отсутствовала переменная
![]() ,
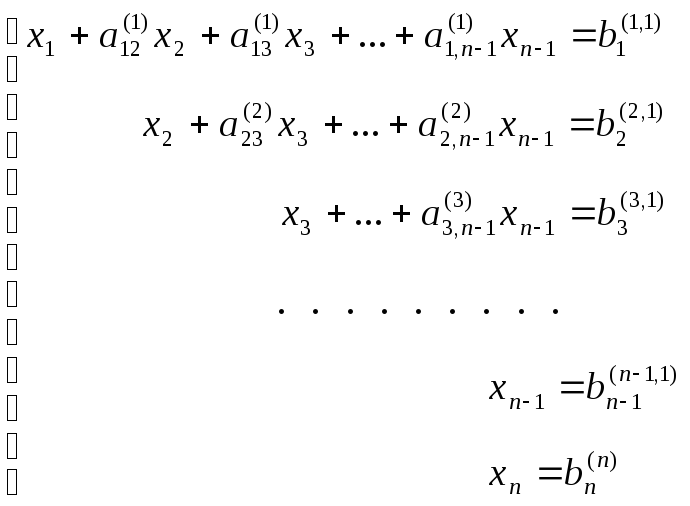
то уравнение не преобразуется). Теперь,
оставив без изменения первое уравнение
системы (5), сделаем разрешающим второе
уравнение и применим описанную процедуру
к системе из n-1 уравнений,
исключая
,
то уравнение не преобразуется). Теперь,
оставив без изменения первое уравнение
системы (5), сделаем разрешающим второе
уравнение и применим описанную процедуру
к системе из n-1 уравнений,
исключая
![]() из оставшихся уравнений. Получим систему
из оставшихся уравнений. Получим систему
где
![]()
![]()
![]()
![]()
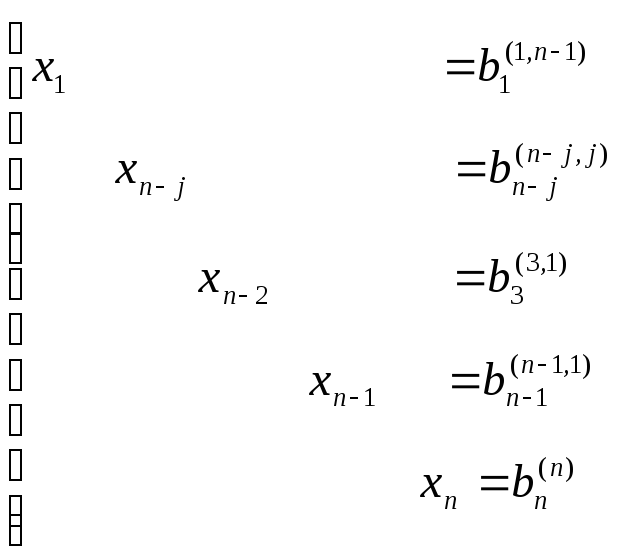
Продолжая аналогичные вычисления, приведем систему (3) к эквивалентной системе с треугольной матрицей коэффициентов
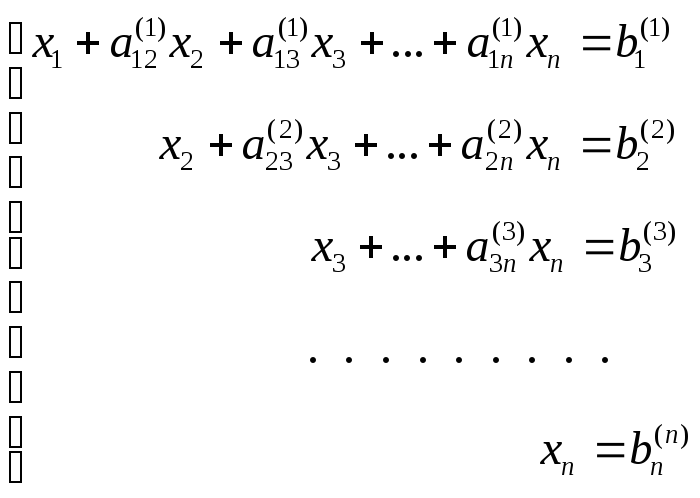 (6)
(6)
Прямой ход решения выполнен.
Обратный ход:
-
последовательно исключаем неизвестное
 ,
начиная с
,
начиная с
 уравнения и заканчивая первым. Получаем
уравнения и заканчивая первым. Получаем
 (7)
(7)
Затем исключаем неизвестное
![]() из уравнений с номером j
из уравнений с номером j
![]() и т.д.
и т.д.
В результате получаем решение системы
Для уменьшения погрешности вычислений существуют различные модификации метода Гаусса.
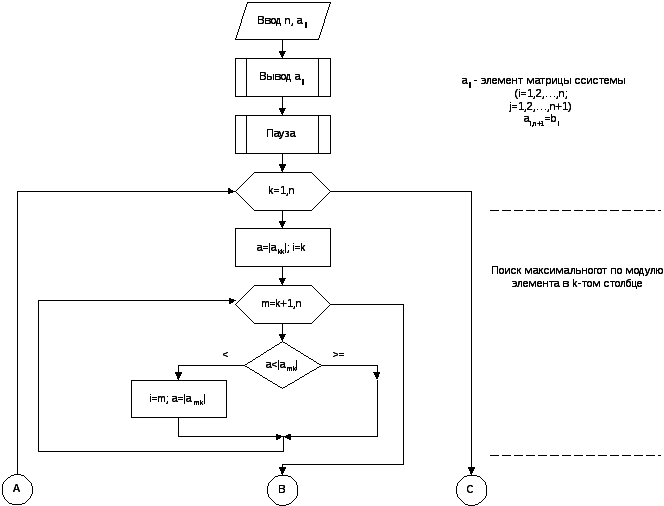
Метод Гаусса с выбором максимального элемента по столбцу
В начале первого шага прямого хода среди
коэффициентов
![]()
![]() при неизвестном
при неизвестном
![]() находят наибольший по модулю. Пусть это
находят наибольший по модулю. Пусть это
![]() .
После этого в исходной системе делают
перестановку: меняют местами 1-ое и j-ое
уравнения. Далее выполняют описанные
действия.
.
После этого в исходной системе делают
перестановку: меняют местами 1-ое и j-ое
уравнения. Далее выполняют описанные
действия.
В начале второго шага прямого хода
максимальный по модулю элемент выбранный
среди коэффициентов
![]()
![]() при неизвестном
при неизвестном
![]() .
Снова возможна перестановка уравнений
и исключение
.
Снова возможна перестановка уравнений
и исключение
![]() из
третьего и последующих уравнений и т.д.
из
третьего и последующих уравнений и т.д.
При выполнении процедуры прямого хода возможны следующие случаи:
-
матрица А приводится к треугольной (получаю решение).
-
число преобразованных уравнений системы меньше числа неизвестных (ранг матрицы А< n) – Это происходит, если в системе получаются в процессе преобразований тождества 0=0. Система имеет бесконечное множество решений.
-
все коэффициенты при неизвестных в каком-либо уравнении равны нулю, свободный член отличен от нуля. Система не имеет решения.
Блок-схема решения системы линейных алгебраических уравнений методом Гаусса с выбором главного элемента (по столбцу)

ЛЕКЦИЯ 4
Метод итераций
Рассмотрим систему линейных алгебраических уравнений
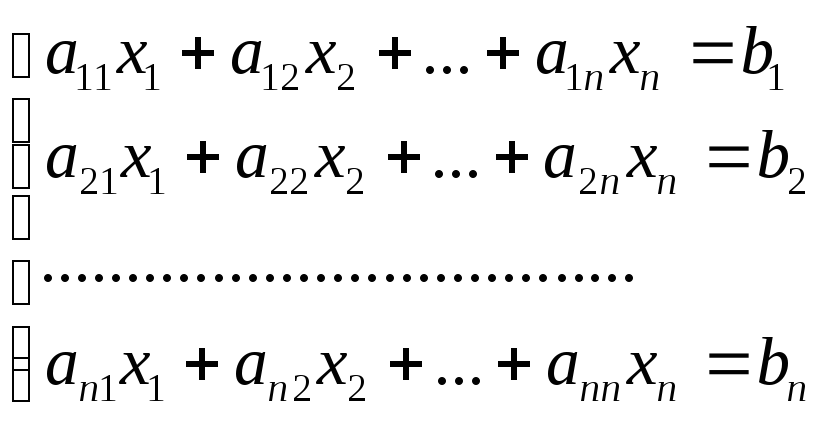 (1)
(1)
Если все диагональные элементы
![]()
![]() ,
то систему (1) можно представить в
приведенном виде
,
то систему (1) можно представить в
приведенном виде
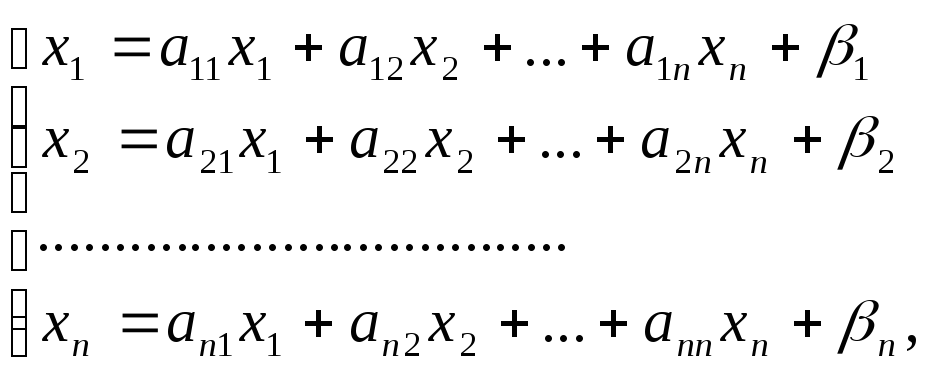 (2)
(2)
где
![]()
![]()
Введем обозначения
Тогда система (2) запишется в виде
![]() (3)
(3)
В качестве начального приближения
![]() возьмем вектор и
подставим его в уравнение (3). Получим
возьмем вектор и
подставим его в уравнение (3). Получим
![]() .Продолжая
процесс, получим последовательности
приближений:
.Продолжая
процесс, получим последовательности
приближений:
![]() -
первое приближение
-
первое приближение
![]() -второе
приближение (4)
-второе
приближение (4)
. . . . . . . . .
![]() -
(k+1)-ое приближение.
-
(k+1)-ое приближение.
Если существует предел
последовательности векторов
![]() то, переходя к пределу в равенстве
то, переходя к пределу в равенстве
![]() при
при
![]() ,
убеждаемся, что
является решением уравнения (3), т.е.
,
убеждаемся, что
является решением уравнения (3), т.е.
![]()
Достаточное условие сходимости итерационного процесса:
Теорема. Если какая-нибудь норма
матрицы А меньше единицы:
![]() ,
то уравнение (3) имеет единственное
решение , к которому
стремится последовательность итераций
(4) при любом выборе начального приближения.
,
то уравнение (3) имеет единственное
решение , к которому
стремится последовательность итераций
(4) при любом выборе начального приближения.
Под нормой матрицы
![]()
![]() понимают
следующие выражения:
понимают
следующие выражения:
 (m
– норма - максимальное значение суммы
модулей элементов строки)
(m
– норма - максимальное значение суммы
модулей элементов строки)
 (l
– норма - максимальное значение суммы
модулей элементов столбца)
(l
– норма - максимальное значение суммы
модулей элементов столбца)
![]() (k
- норма)
(k
- норма)
Пример: для матрицы
![]()
![]()
![]()
В расчетах полагают
![]() .
Погрешности приближенного решения
уравнения (3) на k-м шаге
оценивают неравенством
.
Погрешности приближенного решения
уравнения (3) на k-м шаге
оценивают неравенством
![]() , (5)
, (5)
где
![]() -
норма вектора X
-
норма вектора X
![]() m-норма или кубическая
норма
m-норма или кубическая
норма
![]() l-норма
или октаэдрическая норма
l-норма
или октаэдрическая норма
![]() k-норма
или сферическая норма.
k-норма
или сферическая норма.
Из неравенства (5) можно получить оценку числа итераций k, необходимых для обеспечения заданной точности .
Отклонение приближения
![]() от решения по норме
не будет превышать ,
если
от решения по норме
не будет превышать ,
если
![]() (6)
(6)
Для вывода (6) достаточно рассмотреть равенства:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
и т.д.
;
и т.д.
![]()
Далее
![]() .
.
И, учитывая, что
![]() ,
т.к. норма
,
т.к. норма
![]() .
.
В неравенствах (5) и (6) используются согласованные нормы для матриц и векторов, т.е. m и l-нормы.
Неравенство (6) дает завышенную оценку
числа итераций k. Из (6)
можно получить удобное условие,
позволяющее принять приближение
![]() в качестве решения с точностью .
в качестве решения с точностью .
![]() (7)
(7)
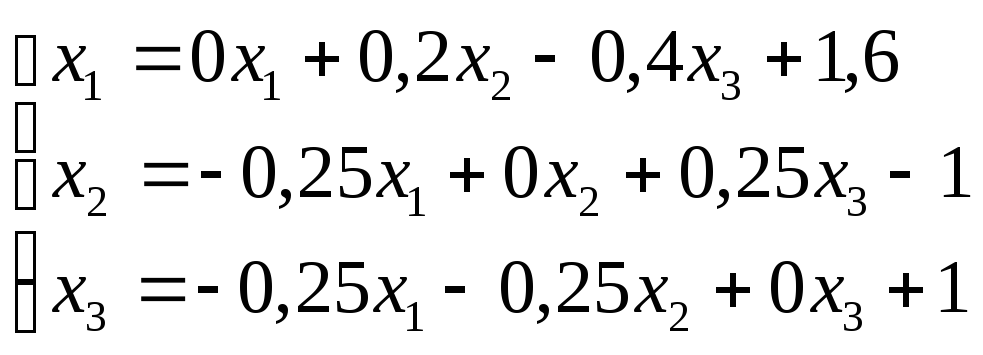
Пример: Найти решение системы уравнений
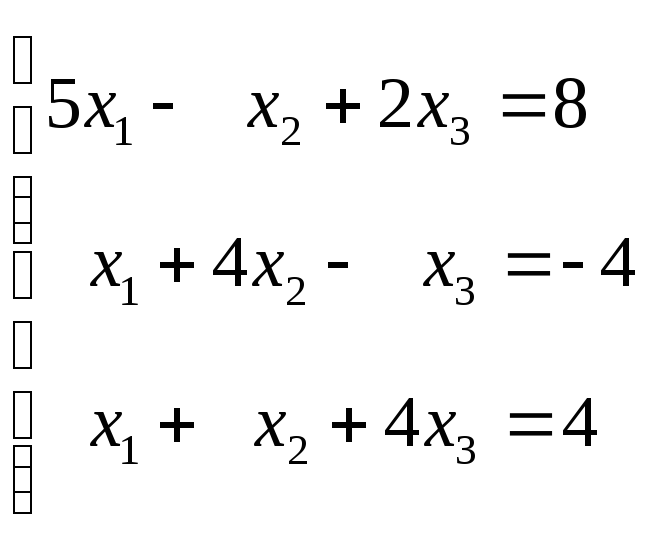
методом итераций с точностью 10-2.
Решение: Приведем систему к виду (2)
Запишем последовательность итераций
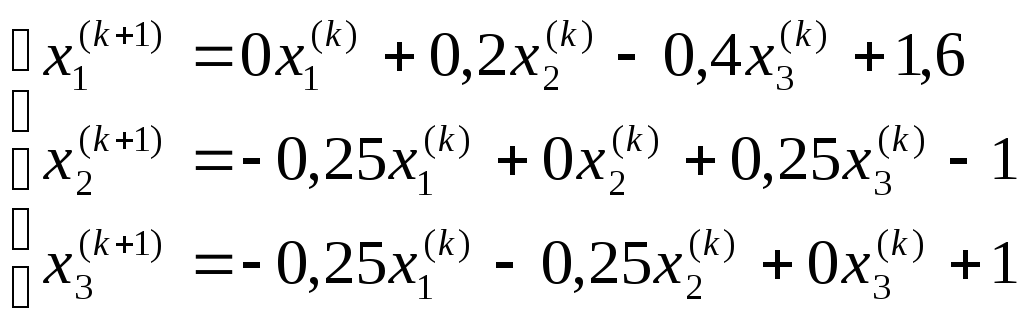 (8)
(8)
Для приведенной матрицы
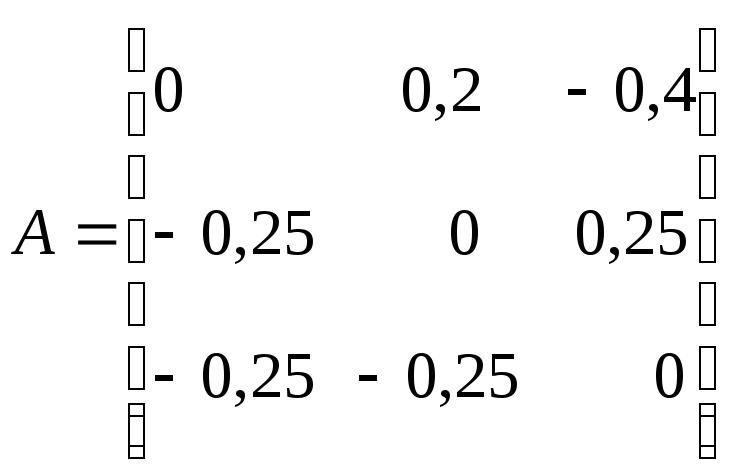 достаточное условие сходимости
выполняется по m-норме:
достаточное условие сходимости
выполняется по m-норме:

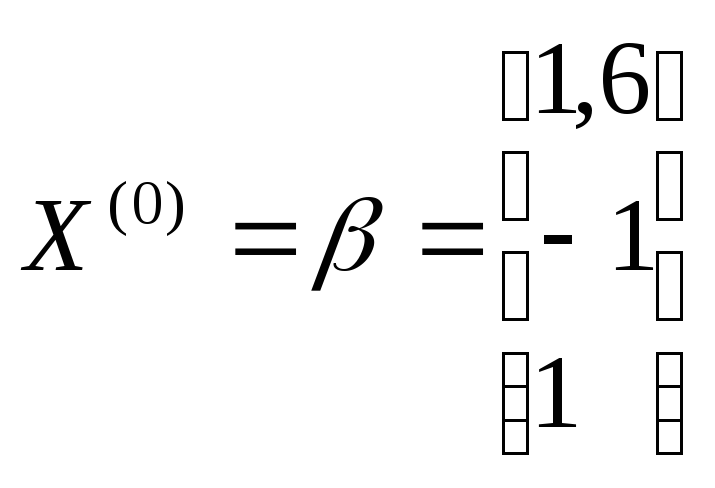
В качестве начального приближения
возьмем вектор-столбец свободных членов
приведенной системы
![]() .
.
Число итераций для достижения заданной
точности
![]() определяем из неравенства (6)
определяем из неравенства (6)
![]() ,
которое запишем так:
,
которое запишем так:
![]() ,
действительно:
,
действительно:
![]()
![]() .
.
![]() ;
;
![]() т.к.
т.к.
![]() то
то
![]() ;
;
![]() .
.
Вычислим теперь три последовательных приближения по формулам (8) и оценим погрешность каждого результата, используя неравенство (6) в виде:
![]() .
.
Первое приближение:

![]()
Следовательно,
 дает
значение корня ξ с погрешностью, не
превышающей величины
дает
значение корня ξ с погрешностью, не
превышающей величины
![]() .
.
Далее последовательно находим:
 ;
;
![]()
![]() .
.
Третья итерация:
 ;
;
![]()
![]() .
.
Заданная точность достигается за 5
шагов. Точное решение
 .
.