

3.2 Математические модели
3.2.1 Понятие математической модели
Построение математической модели на этапе Э1 включает в себя пять взаимосвязанных подэтапов :
-
Уяснение и постановка задачи, определение целей исследования.
-
Декомпозиция системы на компоненты, допускающие удобное математическое или алгоритмическое описание.
-
Определение параметров, переменных, пространства состояний системы, установление пределов изменения каждой характеристики.
-
Выбор показателей КЦФ, т.е. вектора
 .
. -
Описание концептуальной модели S` системы S по одному из представленных ниже типов и проверка ее адекватности.
В качестве примеров рассмотрим:
А) гибкую производственную систему обработки несущих конструкций РЭС (рис. 3.3), состоящей из автоматизированного склада, крана- штабелера, пунктов контроля, робота, накопителей и станков с ЧПУ.
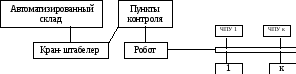
Рис. 3.3 ГПС обработки несущих конструкций РЭС
Б) Локальную сеть сбора, обработки и выдачи сигналов управления для разнесенных пространственных объектов (рис.3.4), состоящую из Аn преобразователей и Вn микропроцессорных модулей приемо-передатчиков, выдающих с заданным периодом по радиоканалу информацию о текущих значениях параметров и с высшим приоритетом аварийные сигналы. Центральный приемо-передающий модуль-концентратор (ЦППК), центральный процессор (ЦП), способный вырабатывать и передавать на преобразователи новые уставки и сигналы управления
А1 В1

 связь по радиоканалу
связь по радиоканалу
ЦППК ЦП






АN ВN
 команды управления
команды управления


Рис. 3.4 Локальная информационно-управляющая сеть
Введем
обозначения:
![]() - временной интервал моделирования
системы S
(интервал модельного времени), где:
- временной интервал моделирования
системы S
(интервал модельного времени), где:
-
t0 время начала моделирования (обычно полагают t0 = 0);
-
Т – время окончания моделирования;
-
 -
текущее значение модельного времени.
-
текущее значение модельного времени.
Построение математической модели системы S начинается с определения параметров системы и переменных, определяющих процесс функционирования системы.
Физическую интерпретацию вводимых здесь понятий будем давать, используя пример ГПС (рис.3.3).
Параметры
системы
![]() - это характеристики системы, остающиеся
постоянными на всем интервале моделирования
- это характеристики системы, остающиеся
постоянными на всем интервале моделирования
![]() .
.
Если
значения
![]() определены
на некотором множестве
определены
на некотором множестве
![]() , т.е.
, т.е.
![]() ,
,
то говорят, что имеется параметрическое семейство систем.
Пример. Количество единиц оборудования и технические характеристики оборудования в ГПС.
Множество переменных разбивают на два подмножества – независимых и зависимых переменных.
1. К независимым переменным отнесем следующие характеристики.
-
Входные воздействия на систему (сигналы): u1, u2,…,un1. Входные воздействия в момент t
 Т
характеризуются вектором
Т
характеризуются вектором
u
= u(t) = (u1(t),…,un1(t))
![]() U
U![]() Rn1.
Rn1.
Среди
{ui}
могут быть управляющие воздействия,
например, u1,
u2,…,![]()
![]() а остальные n1-n1'
а остальные n1-n1'![]() воздействий - неуправляющие.
воздействий - неуправляющие.
Пример входных воздействий - управляющие воздействия, поступающие с ЦПУ на управляемые компоненты ГПС.
-
Воздействия внешней среды: Среди них могут быть контролируемые (наблюдаемые) и неконтролируемые (ненаблюдаемые), детерминированные и случайные воздействия. В момент t
 Т
они характеризуются вектором
Т
они характеризуются вектором
v=
v(t)
= (v1(t),…,vn2(t))![]() V
V
![]() Rn2.
Rn2.
Пример. Наличие дефектов у заготовок: внешние дефекты - контролируемые, а внутренние (скрытые) - неконтролируемые воздействия; случайные интервалы времени между поступлением деталей на обработку.
-
Переменные, характеризующие состояние системы , x1, x2,…,xn3. В отличие от {
 }
состояния {xi}
характеризуют свойства системы,
изменяющиеся во времени. Состояние
системы в момент
}
состояния {xi}
характеризуют свойства системы,
изменяющиеся во времени. Состояние
системы в момент
 описывается
вектором
описывается
вектором
x=
x(t)
= (x1(t),…,xn3(t))![]() X
X![]() Rn3
Rn3
где X - пространство состояний или фазовое пространство системы (множество возможных значений вектора х). Если t1< t2 <… - моменты изменения cостояния системы, то последовательность x(t1), x(t2),… называется фазовой траекторией системы.
Пример.
x(t) = (x1,
x2)
- вектор, описывающий состояние
обрабатывающих центров ГПС в момент
![]() ,
,
xi=
X
= {(0,0), (0,1), (1,0), (1,1)}![]()
2. К зависимым переменным отнесем следующие характеристики.
-
Выходные характеристики (сигналы) системы у1, у2, ...,уn1 определяемые в момент
 вектором
вектором
y
= y(t)=
(y1(t),…yn4(t))![]() .
.
Пример. Сигналы, поступающие из ОЦ1 и ОЦ2 на ЦПУ, являются выходными для обрабатывающих центров и управляющими для ЦПУ.
-
Показатели КЦФ системы q1, q2,…qk характеризуют ее цели, (т.е. характеризуют достижения системой функционирования системы) и образуют вектор
q
= q(t) = (q1(t),…,qk(t))![]() Q
Q![]() Rk,
t
Rk,
t![]()
Пример. Производительность ГПС за смену, расход материальных ресурсов.
При
наличии в системе случайных факторов
(например, случайных воздействий внешней
среды) значения
![]() являются также случайными и поэтому не
могут служить показателями КЦФ. В этих
случаях в качестве Q
используют
средние значения {Qi}
, определяемые соотношениями
являются также случайными и поэтому не
могут служить показателями КЦФ. В этих
случаях в качестве Q
используют
средние значения {Qi}
, определяемые соотношениями
![]()
где E{.} - символ математического ожидания (см. раздел 2.3).
-
Внутренние параметры СУ
 ,
практически не зависящие от времени
и могущие изменяться только по желанию
исследователя.
,
практически не зависящие от времени
и могущие изменяться только по желанию
исследователя.
![]()
Связи между зависимыми и независимыми переменными изображены на рис. 3.5.
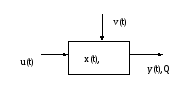
Рис. 3.5. Связь между переменными
Процесс функционирования системы во времени описывается операторными соотношениями (заданными аналитически или алгоритмически) для состояний, выходных характеристик КЦФ системы:
![]()
![]() (3.1)
(3.1)
![]()
где
![]() обозначают реализацию процесса u(t)
на отрезке [0,t],
аналогично обозначены x(t),
y(t)
.
обозначают реализацию процесса u(t)
на отрезке [0,t],
аналогично обозначены x(t),
y(t)
.
Через
![]() обозначены соответствующие операторы,
описывающие динамику зависимых и
независимых переменных и показателей
эффективности.
обозначены соответствующие операторы,
описывающие динамику зависимых и
независимых переменных и показателей
эффективности.
Зависимости
(3.1) называются законами
функционирования системы
S;
зависимость y
= y(t),
t![]()
![]() называется выходной
траекторией
системы, в зависимость x
= x(t),
t
называется выходной
траекторией
системы, в зависимость x
= x(t),
t![]()
![]() - фазовой
траекторией.
- фазовой
траекторией.
В
выборе переменных x(t)
, характеризующих состояние системы в
момент времени t![]() T
, обычно имеется произвол, который
используется так, чтобы упростить закон
функционирования (4.1) и привести его к
виду
T
, обычно имеется произвол, который
используется так, чтобы упростить закон
функционирования (4.1) и привести его к
виду
x (t)
= F(x(0),
u(t),
v(t),
(t)
= F(x(0),
u(t),
v(t),
![]() ,
t),
,
t),
y(t) = G1(x(t), t), (3.2)
q(t)
= G2
(x(t),
t),
t![]()
![]()
где
![]() - некоторые операторы; x(0)
- начальное состояние системы. Закон
(3.2) отличается от (3.1) следующими
особенностями:
- некоторые операторы; x(0)
- начальное состояние системы. Закон
(3.2) отличается от (3.1) следующими
особенностями:
-
состояние системы S в момент времени t
 зависит
от начального состояния системы x(0);
зависит
от начального состояния системы x(0); -
выходные характеристики и показатели эффективности системы в момент времени t зависят от состояний x(t) и текущего времени.
Пример. Для ГПС, состоящей из двух обрабатывающих центров, влияние воздействия внешней среды, состоящее в наличии отклонений параметров заготовок от стандартов, учтем при формировании фазового пространства, Пусть xi(t), i = 1,2 - переменная, характеризующая состояние i-го ЧПУ в момент времени t. Положим:
,
Тогда влияние на y(t), w(t) воздействия внешней среды v(t) будет учтено в состоянии системы x(t) .
Математической моделью системы называют множество переменных u, v, θ, y, q вместе с законом функционирования в виде (3.1) или (3.2).
Опишем теперь классификацию математических моделей. Операторные соотношения в (3.1), (3.2) могут быть заданы аналитически, то есть с помощью функциональных соотношений или логических условий, либо алгоритмически. В зависимости от способа задания закона функционирования математические модели делятся на аналитические и алгоритмические.
Отметим,
что время t
может рассматриваться и как непрерывная
переменная: t
![]() Т
= [0,T],
и как дискретная.
Т
= [0,T],
и как дискретная.
t
= i![]() ,
i
= 0,1,...,M,
М = [Т/
,
i
= 0,1,...,M,
М = [Т/![]() ],
],
где
![]() - шаг дискретизации. При этом, соответственно,
имеем непрерывные (H)
и дискретные (Д) математические модели.
Если математическая модель не содержит
случайных элементов, то имеем
детерминированную модель (Дт); в противном
случае имеем вероятностную (В) модель.
Таким образом, по признакам непрерывности
и стохастичности можно выделить четыре
обширных класса математических моделей:
непрерывно-детерминированные (НДт)
модели; дискретно-детерминированные
(ДДт) модели; дискретно-вероятностные
(ДВ) модели; непрерывно-вероятностные
(НВ) модели. Элемент классификации
аналитических моделей приведен в таблице
3.1
- шаг дискретизации. При этом, соответственно,
имеем непрерывные (H)
и дискретные (Д) математические модели.
Если математическая модель не содержит
случайных элементов, то имеем
детерминированную модель (Дт); в противном
случае имеем вероятностную (В) модель.
Таким образом, по признакам непрерывности
и стохастичности можно выделить четыре
обширных класса математических моделей:
непрерывно-детерминированные (НДт)
модели; дискретно-детерминированные
(ДДт) модели; дискретно-вероятностные
(ДВ) модели; непрерывно-вероятностные
(НВ) модели. Элемент классификации
аналитических моделей приведен в таблице
3.1
Таблица 3.1 Классификация математических моделей
|
Харак- теристика |
НДт |
ДДт |
ДВ |
НВ |
|
Вид зависимости
|
Дифференциальные и интегральные уравнения |
Теория разностных уравнений, конечные автоматы |
Разностные стохастические уравнения, вероятностный автомат |
Стохастические дифференциальные уравнения, теория массового обслуживания |
 Тип
ММ
Тип
ММ
Примечание: Представленная таблица не претендует на полноту, является лишь иллюстрацией предлагаемой классификации. Остальные модели можно посмотреть в монографии автора, в данном учебном пособии представлены только непрерывно-вероятностные модели, представляющие интерес для имитационного моделирования, один из представителей НВ моделей – теория массового обслуживания выделена в таблице.