

Аналого-цифровые преобразователи.
Аналоговые величины могут быть представлены сигналами различных типов:
э лектрические
сигналы (напряжение, ток и т.д.), сигналы
неэлектрической природы (акустические,
угол поворота и т.д.). Мы будем рассматривать
наиболее часто применяемые АЦП -
преобразователи напряжения в код
(ПНК).Все алгоритмы преобразования ПНК
базируются на уравновешивании входного
напряжения некоторым количеством
квантов, взятых из наперед заданного
набора эталонов. Все алгоритмы
преобразования можно классифицировать
по признаку использования соответствующего
набора эталонов. Наборы эталонов для
различных методов преобразования могу
быть следующими:.
лектрические
сигналы (напряжение, ток и т.д.), сигналы
неэлектрической природы (акустические,
угол поворота и т.д.). Мы будем рассматривать
наиболее часто применяемые АЦП -
преобразователи напряжения в код
(ПНК).Все алгоритмы преобразования ПНК
базируются на уравновешивании входного
напряжения некоторым количеством
квантов, взятых из наперед заданного
набора эталонов. Все алгоритмы
преобразования можно классифицировать
по признаку использования соответствующего
набора эталонов. Наборы эталонов для
различных методов преобразования могу
быть следующими:.
Т.к. минимальный квант и динамический диапазон преобразователя конечные – то все уровни можно пронумеровать и затем построить алгоритм уравновешивания входной величины.
-
Последовательного счета - Кол-во квантов – 1.Кол-во тактов преобр-ния – до 2


-
Цифроследящий алгоритм - Кол-во квантов – 1.Кол-во тактов преобр-ния – до 2


-
Поразрядного сравнения - Кол-во квантов – n.Кол-во тактов преобр-ния –
 n+1
n+1
-
Параллельного действия или считывающего типа - Кол-во квантов – 2n-1 .Кол-во тактов преобр-ния –1.
Итак, в зависимости от способа образования кодовых комбинаций, представляющих собой эквивалент преобразуемой аналоговой величины (напряжение) различают следующие основные типы цифровых преобразователей – ПКН.
а) ПНК последовательного счета.
б) ПНК, реализующий метод цифровой следящей системы.
в) ПНК с поразрядным сравнением.
г) ПНК считывающего типа (или параллельного действия).
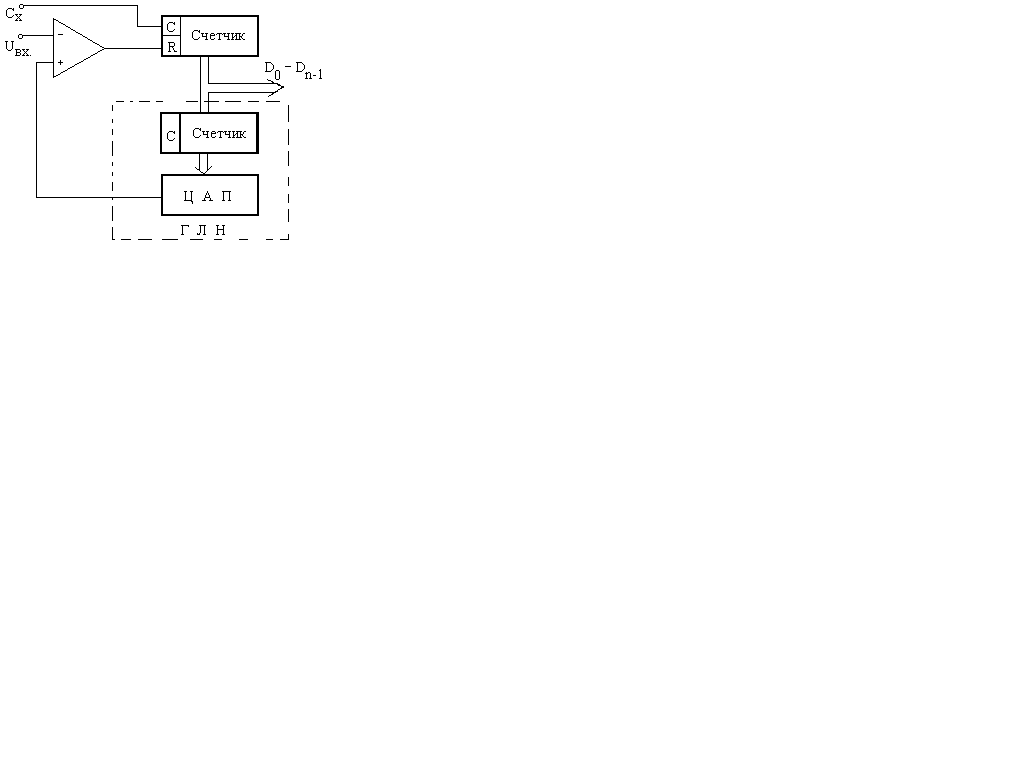
ПНК последовательного счета – в нем измеряемое напряжение сравнивается с линейно изменяющимся напряжением, таким образом, преобразуясь во временной интервал, за время длительности которого специальный счетчик производит подсчет суммы элементарных квантов, цифровой эквивалент которой после цикла преобразования пропорционален измеряемому напряжению.
Б
Пример
функциональной схемы:
Временные
диаграммы работы схемы

Основной недостаток таких ПНК – сравнительно большое время преобразования.
М
N
– max число уровней квантования n
– разрядность преобразователя![]()
,
где![]()
Tв – время возврата схемы в исходное состояние перед следующим тактом преобразования.
TT – период следования импульсов тактовой частоты Сх.
Т.к. входное напряжение за время преобразования изменяется, это приводит к динамической погрешности преобразования ., значение которой можно определить из следующих условий:

Процесс
уравновешивания входной величины
(сравнить).
Рассмотрим один цикл преобразования, предположив, что входное напряжение изменяется с максимальной крутизной (т.к. мы хотим измерить максимальную динамическую погрешность, которая должна быть меньше ошибки квантования).

(1)
Свяжем крутизну входного сигнала с его спектром:

Максимальная крутизна будет у гармоники с fmax. ,тогда учитывая, что период синусоиды:

![]()
(2)
, подставим в первое неравенство
![]()
В предельном случае, когда на преобразователь подается сигнал синусоиды с частотой max Δf и амплитудой –2А = Umax это выражение для FT еще на порядок выше.
Пример:
n=10 Δf=10 Гц.![]()
П
Блок-схема
АЦП цифро - следящего типа Функциональная
схема ПКН.


Пример
реализации реверсивного счетчика А В 1
0 - суммирование 0
1 - вычитание
 начальный
момент компаратор подключает реверсивный
счетчик к Сх
в режиме суммирования, а в моменты
времени Uпкн
= Uвх.
Счетчик переключается в режим вычитания,
начальный
момент компаратор подключает реверсивный
счетчик к Сх
в режиме суммирования, а в моменты
времени Uпкн
= Uвх.
Счетчик переключается в режим вычитания,
Крутизна
входного сигнала. При
ее увеличении > I,
преобразователь выходит из рабочего
режима. Из
условия недопустимости превышения
динамической погрешности – погрешности
преобразования, просто для обеспечения
нормального режима функционирования,
т.к. за период следования тактовой
частоты показания счетчика изменяются
только на единицу.
Таким
образом, ПНК цифроследящего типа
непрерывно «отслеживает» изменение
входного напряжения, т.е.,в отличие от
преобразователя последовательного
счета, здесь преобразование в установившемся
режиме заканчивается через один такт.
Следовательно, если![]() то окончательно:
то окончательно:


Тогда для ПНК цифроследящего типа при n = 10, fvax = 10 Гц., FT = 4 кГц.