

Содержание отчета
-
М-файл построения ПХ объекта, ее график и анализ устойчивости объекта.
-
М-файл построения ПХ замкнутой системы с П- регулятором, ее график и анализ устойчивости.
-
М-файл построения ПХ замкнутой системы с цифровым ПД- регулятором, характерные графики
 ,
анализ устойчивости и показателей
качества переходного процесса.
,
анализ устойчивости и показателей
качества переходного процесса. -
М-файл построения ПХ замкнутой системы с цифровым ПИД- регулятором, характерные графики h(t), значения
 и
и
 ,
финальную h(t),
G
% и
,
финальную h(t),
G
% и
 .
. -
Финальные значения параметров
 ,
обеспечивающие заданные показатели
качества переходного процесса.
,
обеспечивающие заданные показатели
качества переходного процесса. -
Вывод об эффективности использованной методики выбора параметров ПИД- регулятора.
Контрольные вопросы
-
Какой порядок астатизма будет иметь замкнутая система с ПД- регулятором, если удастся обеспечить ее устойчивостью?
-
Какой порядок астатизма будет иметь замкнутая система с ПИД- регулятором?
-
Какое влияние на быстродействие системы влияет величина
 ?
? -
Какое влияние на величину перерегулирования оказывает величина
 ?
? -
Какое влияние на величину перерегулирования оказывает величина
 ?
? -
Известны ли другие методики настройки параметров ПИД- регулятора?
Лабораторная работа № 6 исследование дискретных систем с апериодическим регулятором
Цель работы:
-
приобретение навыков определения параметров апериодических регуляторов, обеспечивающих минимальную длительность переходного процесса замкнутой системы;
-
изучение влияния величины периода дискретизации на устойчивость и длительность переходных процессов.
Теоретическая подготовка к проведению данной лабораторной работы включает изучение разделов курса лекций или (и) разделов рекомендованной литературы, посвященной методикам определения параметров апериодических регуляторов по заданной дискретной модели объекта управления.
В данной работе исследуется дискретная система с объектом, имеющим передаточную функцию
![]()
Величина
![]() и период дискретизации
и период дискретизации
![]() выбираются из таблицы 6.1.
выбираются из таблицы 6.1.
Таблица 6.1.
|
№ вар. |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
4,6 |
6,5 |
8,0 |
5,5 |
2,5 |
3 |
|
|
1,0 |
0,5 |
1 |
0,8 |
0,2 |
0,3 |
Порядок выполнения лабораторной работы
-
Вызвать систему MATLAB 6.х.
-
Найти дискретную модель заданного объекта, используя m-файл

где
![]() указывает на то, что управляющее
воздействие на входе объекта формируется
ЦАП.
указывает на то, что управляющее
воздействие на входе объекта формируется
ЦАП.
В результате выполнения m-файла дискретная передаточная функция объекта представляется в виде
 (2)
(2)
3. Определить
апериодический регулятор для системы
с требуемым порядком астатизма
![]() .
Желаемая передаточная функция замкнутой
системы в данном случае имеет вид
.
Желаемая передаточная функция замкнутой
системы в данном случае имеет вид
![]() (3)
(3)
где
![]() .
.
Отсюда передаточная функция разомкнутой желаемой системы
 (4)
(4)
Передаточная функция апериодического регулятора в этом случае
 (5)
(5)
-
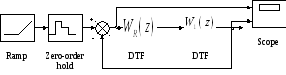
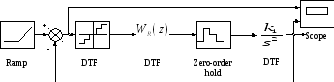
Для подтверждения того, что рассчитанный регулятор является апериодическим, средствами Simulink собрать схему, показанную на рис.6.1.
-
Рис.6.1.
В качестве параметров
источника взять
![]() ,
время моделирования
,
время моделирования
![]() с,
период квантования
с,
период квантования
![]() .
.
4. Осциллограммы, полученные в результате моделирования, сохранить для последующей копирования в отчет по лабораторной работе.
 5. Для проверки
адекватности дискретной системы
средствами Simulink собрать схему, показанную
на рис.6.2.
5. Для проверки
адекватности дискретной системы
средствами Simulink собрать схему, показанную
на рис.6.2.
Рис. 6.2.
Параметры моделирования оставить прежними, шаг квантования по уровню Quantizer принять равным 25/(27-1), считая, что апериодический регулятор будет реализован на восьмиразрядном микроконтроллере.
6. Осциллограммы, полученные в результате моделирования, сохранить для отчета.
7. Проделать пункты 2-7 при измененных значений периода дискретизации
![]()
8. Проанализировать полученные результаты моделирования и сделать вывод о влиянии периода дискретизации на адекватность дискретной модели ее дискретно-непрерывному эталону.