

Содержание отчета
1.М-файл ввода данных о передаточной функции (1) и построения логарифмических частотных характеристик.
-
Графики
 ,
значение
,
значение
 и периода
и периода
 квантования.
квантования. -
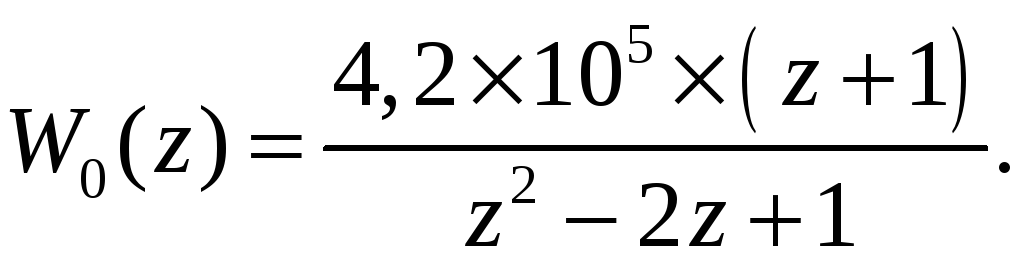
Передаточную функцию дискретной модели объекта
![]()
-
Критический коэффициент усиления
 П-регулятора и вектор
П-регулятора и вектор
 корней характеристического уравнения.
корней характеристического уравнения. -
Одну из переходных характеристик и определение
 .
. -
Графики зависимостей
 ,
полученные по результатам выполнения
п.8 порядка выполнения, и зависимости
,
полученные по результатам выполнения
п.8 порядка выполнения, и зависимости
 ,
полученной теоретическим расчетом.
,
полученной теоретическим расчетом. -
Результаты исследования величин установившихся ошибок в системе с П- регулятором и объектом (2).
Контрольные вопросы
-
Каким образом определяется порядок астатизма систем по передаточной функции
 разомкнутой системы и по передаточной
функции
разомкнутой системы и по передаточной
функции
 ошибки?
ошибки? -
Как определить коэффициент усиления разомкнутой системы по виду ее передаточной функции?
-
В каком случае порядок астатизма системы по возмущению, приложенному к входу объекта, совпадает с порядком астатизма системы по ее входному воздействию?
-
Чему равны значения двух первых коэффициентов ошибки в системе со вторым порядком астатизма?
Лабораторная работа № 5 Исследование качества переходных процессов
Цель работы:
-
приобретение навыков построения переходной характеристики цифровых элементов и систем, определения показателей качества переходных процессов;
-
изучение методик выбора параметров цифрового ПИД- регулятора, обеспечивающего требуемые показатели качества переходного процесса.
Теоретическая подготовка к проведению данной лабораторной работы включает:
1) изучение разделов курса лекций или (и) разделов рекомендованной литературы, посвященных методам построения переходных характеристик;
2) определение по ПХ показателей качества переходного процесса, перерегулирования, времени регулирования и установления, установившихся ошибок, настроек параметров цифровых ПИД- регуляторов, обеспечивающих заданные значения показателей качества переходных процессов.
Порядок выполнения работы
-
Вызвать систему MATLAB 6.x.
-
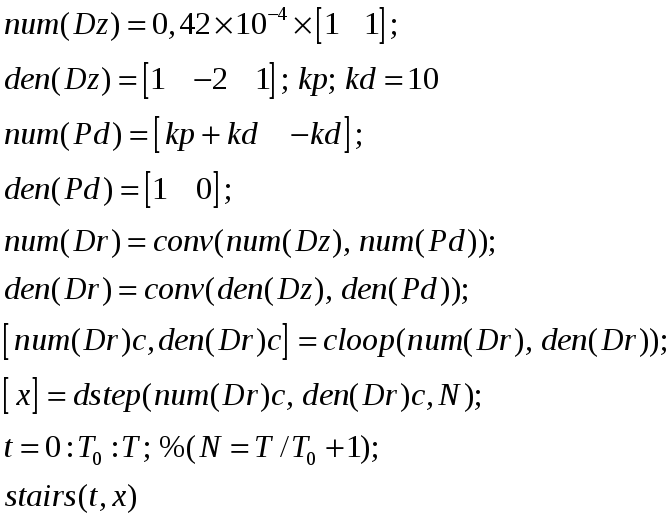
Ввести m-файл
![]()
![]()
определяющий ПФ дискретной модели объекта при периоде дискретизации 0,02 с, вида
-
Построить переходную характеристику дискретной модели объекта, используя операторы:
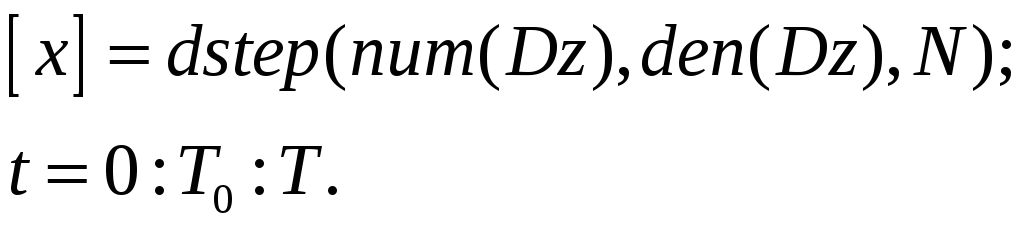
Здесь
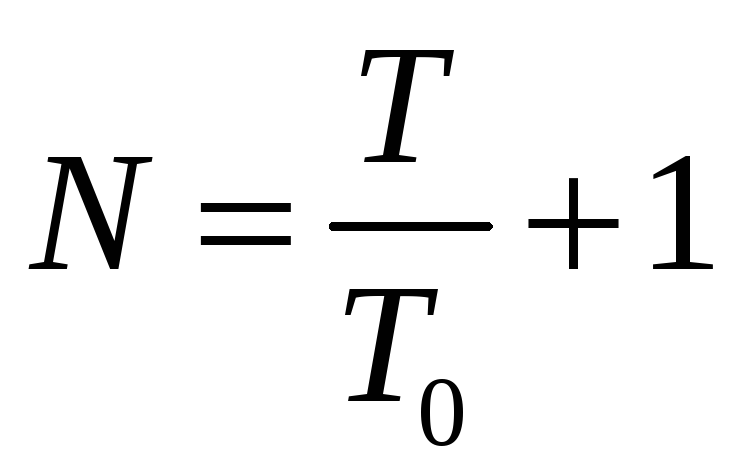 .
При T=5
с, T0=0.02
c,
N=251.
.
При T=5
с, T0=0.02
c,
N=251.
В результате выполнения последнего оператора появляется график реакции дискретной модели объекта на единичный скачок.
4. Убедиться, что объект обладает интегрирующими свойствами и без регулятора является неустойчивым по входу. Сохранить для отчета график реакции.
5. Ввести в систему П- регулятор, замкнуть систему единичной обратной связью и построить переходную характеристику замкнутой системы с
П- регулятором. Для этого в командном окне ввести m-файл:
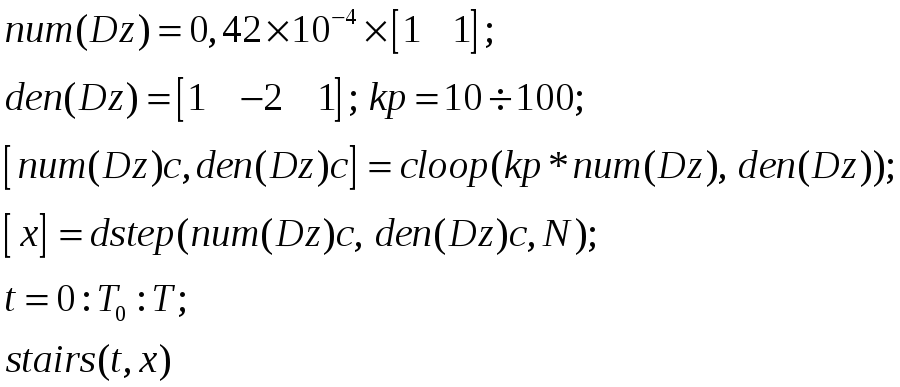
6. Проанализировать переходную характеристику замкнутой системы с
П- регулятором и
отметить, что изменением величины
![]() нельзя
обеспечить устойчивость замкнутой
системы. Убедиться в этом, построить ПХ
при
нельзя
обеспечить устойчивость замкнутой
системы. Убедиться в этом, построить ПХ
при
![]() .
.
7. Для обеспечения устойчивости ввести дифференциальную составляющую ПД- регулятора.
В результате передаточная функция ПД- регулятора примет вид
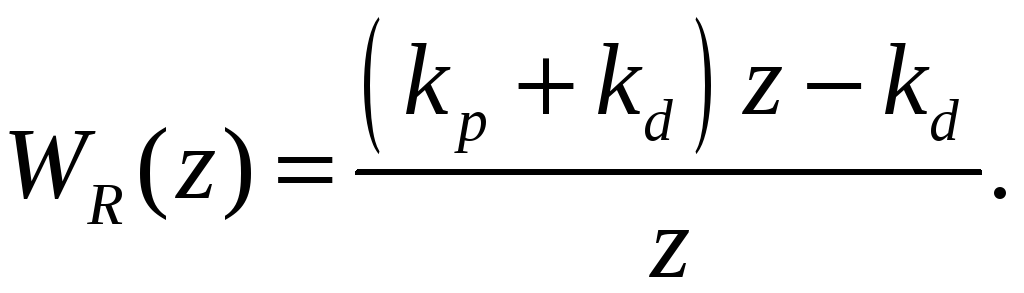
Оставив прежнюю
величину
![]() подобрать величину
подобрать величину
![]() ,
при которой достигаются значения
,
при которой достигаются значения
![]() и
и
![]() ,
приведенные в таблице 4.1
,
приведенные в таблице 4.1
Таблица 4.1
|
№вар |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
5 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
3 |
4 |
1,5 |
2,0 |
2,5 |
3,5 |
4,5 |
Для подбора использовать переходные характеристики, получаемые в результате выполнения следующего m-файла:
8. Если подбором
![]() и
и
![]() не удается обеспечить заданные значения
не удается обеспечить заданные значения
![]() и
и
![]() ,
то использовать цифровой ПИД- регулятор,
передаточная функция которого имеет
вид
,
то использовать цифровой ПИД- регулятор,
передаточная функция которого имеет
вид

при значениях
![]() .
.
9. Сохранить
характерные переходные характеристики,
получаемые в п.п. 7-8; значения параметров
![]() привести в отчете.
привести в отчете.
10. Сделать вывод об эффективности использованной методики настройки параметров ПИД- регулятора.