

Лабораторные работы / исследование системы прямого цифрового управления с датчиком лир-20
.docБАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ИНЖЕНЕРНО – СТРОИТЕЛЬНЫЙ ФАКУЛЬТЕТ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
Лабораторная работа № 1
по дисциплине
Локальные системы управления
Исследование системы прямого цифрового управления с датчиком
типа ЛИР-20
Выполнила ст. гр. УИТ – 53
Харипова Н. А.
Проверил преподаватель
Комлева О. А.
2008
Данная работа подразделяется на два этапа:
1ЭТАП
Целью работы являются:
-
Изучение принципа действия и условий формирования выходных сигналов унитарно-кодового датчика ЛИР-20.
-
Знакомство с устройствами формирования ШИМ в системе прямого цифрового управления.
-
Определить характеристик исполнительного двигателя в режиме ШИМ.
Исследуемая система прямого цифрового управления включает в себя ПЭВМ со встроенной платой цифрового ввода/вывода ЛА-ТМР, усилитель-преобразователь, исполнительный двигатель, инкрементный датчик угла ЛИР-20, схему формирования сигнала направления вращения двигателя.
ПЭВМ совместима с IBM PC и содержит плату ЛА-ТМР. Плата является частью устройства связи с объектом и выполняет определенные задачи, присущие технологическим контроллерам. Через нее осуществляется обмен информации между ОУ и ЭВМ, и формирует ШИМ-сигнал. Она содержит:
-6 шестнадцатиразрядных счетчиков-таймеров Intel P82C54;
-высокостабильный кварцевый генератор с частотой 10 МГц;
-16 цифровых линий, организованных как 8 входов и 8 выходов;
-линии стробирования;
-2 независимые линии запроса прерывания для IBM PC.
На счетчик-таймер могут быть поданы сигналы с частотой 10 или 1 МГц.
УП является усилителем мощности с гальванической развязкой и обеспечивает преобразованием 2 сигналов сигнал, пропорциональный напряжению и позволяющий осуществлять измерение направления вращения двигателя.
В качестве исполнительного двигателя используется двигатель Д-25Г.
Обратная связь осуществляется с помощью инкрементного датчика угла ЛИР-20. В основе которого лежит принцип фотоэлектрического сканирования штриховых растворов. На рисунке представлены временные диаграммы выходных сигналов датчика. Этот датчик обеспечивает сдвиг фаз между выходными сигналами А и В на четверть шага.

Датчик связан с двигателем через редуктор с передаточным числом i=24.
Структурная схема разомкнутой системы.
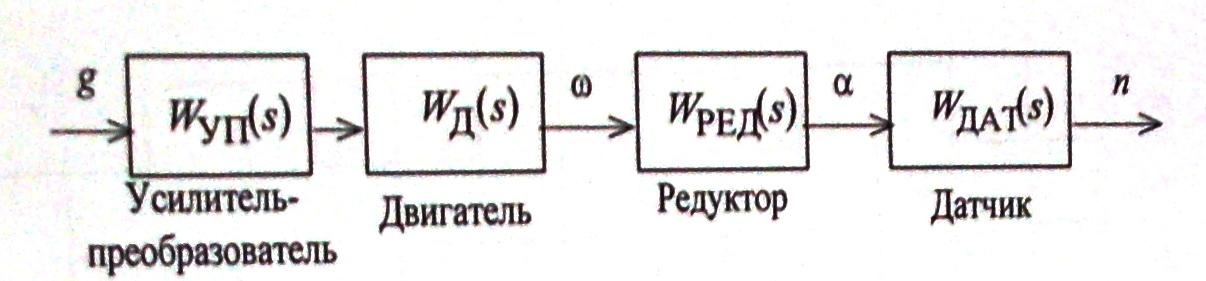
Учитывая что период дискретизации на несколько порядков меньше длительности переходных процессов в системе и шаг дискретизации достаточно мал (1/1000 оборота или 0,006 рад), можно рассматривать систему управления как непрерывную.
Пологая что
постоянные времени усилителя-преобразователя
(ТУП![]() с)
и якорная постоянная двигателя ТЯ
с)
и якорная постоянная двигателя ТЯ![]() с.
Примем передаточные функции элементов
в следующем виде:
с.
Примем передаточные функции элементов
в следующем виде:
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Для измерения скорости используется схема, представленная на рисунке. Штриховой линией выделены блоки, реализованные программно.

Т. о. положение
![]() и скорость
и скорость
![]() можно вычислить:
можно вычислить:
![]()
![]()
где
![]() =0,92
=0,92
n – количество полученных от датчиков импульсов (6 импульсов)
Воздействие задается как отношение ТР/ТШИМ=2/1,08=1,08, где ТР- время, в течение которого на выходе ШИМ формируется установлена единица (рабочий период); ТШИМ- период ШИМ.

Отрицательное значение обозначало бы, что вращение идет в обратную сторону.
Значение частоты ШИМ влияет на тепловые потери в якоре двигателя, которые определяются эффективным значением тока якоря. Поэтому при выборе частоты ШИМ для снижения эффективного значения тока необходимо исходить из требуемого соотношения между электрической постоянной времени двигателя и частотой ШИМ, которое должно подчинятся неравенству
![]()
С учетом приведенных ПФ элементов структурной схемы ПФ разомкнутой системы имеет вид:
![]()
где К=
![]() -
коэффициент передачи разомкнутой
системы
-
коэффициент передачи разомкнутой
системы
Сняв разгонную
характеристику двигателя
![]() ,
учитывая принятую модель его математического
представления, можно уточнить ТЭМ
при выбранном значение ШИМ, в соответствии
с тем, что
,
учитывая принятую модель его математического
представления, можно уточнить ТЭМ
при выбранном значение ШИМ, в соответствии
с тем, что
![]()
где
![]() - начальная скорость,
- начальная скорость,
![]() - изменение скорости за весь период
переходного процесса. При t=TЭМ:
- изменение скорости за весь период
переходного процесса. При t=TЭМ:
![]()
![]()
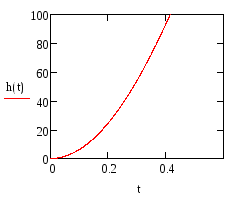
Переходный процесс
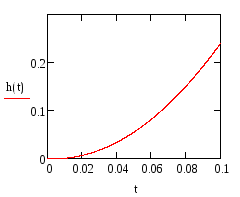
Найдя
на графике переходного процесса
![]() и соответствующее ему значение времени
t=
0,6 , можно определить электрическую
постоянную времени двигателя TЭМ
и соответствующее ему значение времени
t=
0,6 , можно определить электрическую
постоянную времени двигателя TЭМ
Вывод:
2 ЭТАП
Целью работы является:
-
Изучение возможных вариантов построения систем прямого цифрового управления с датчиком перемещения ЛИР-20, сравнение вариантов.
-
Расчет регуляторов системы прямого цифрового управления для разных вариантов структурной организации (одно- и двухконтурной систем).
-
Исследование статических и динамических характеристик системы прямого цифрового управления как позиционной системы при отработке малых, средних и больших перемещений.
-
Исследование характеристик системы при типовых воздействиях g(t)=g0t и g(t)=g0t2/2
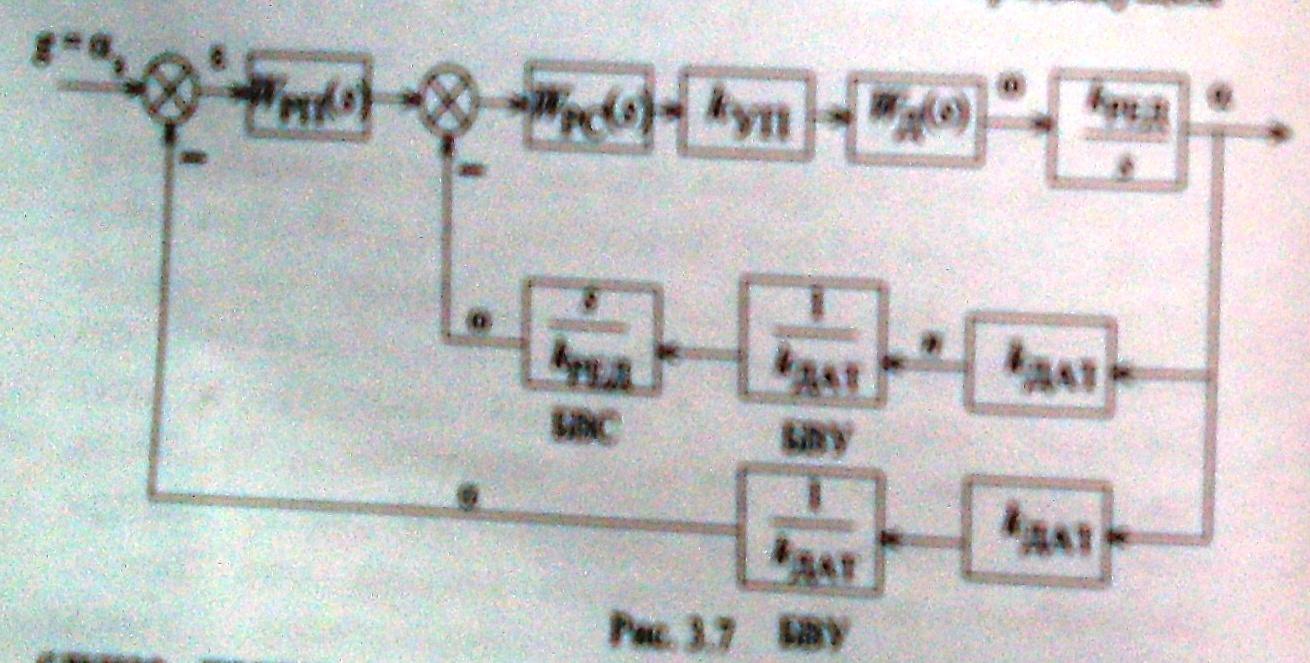
При решение задач синтеза и анализа системы будем рассматривать ее как линейную. Структурная схема одноконтурной системы регулирования положения:
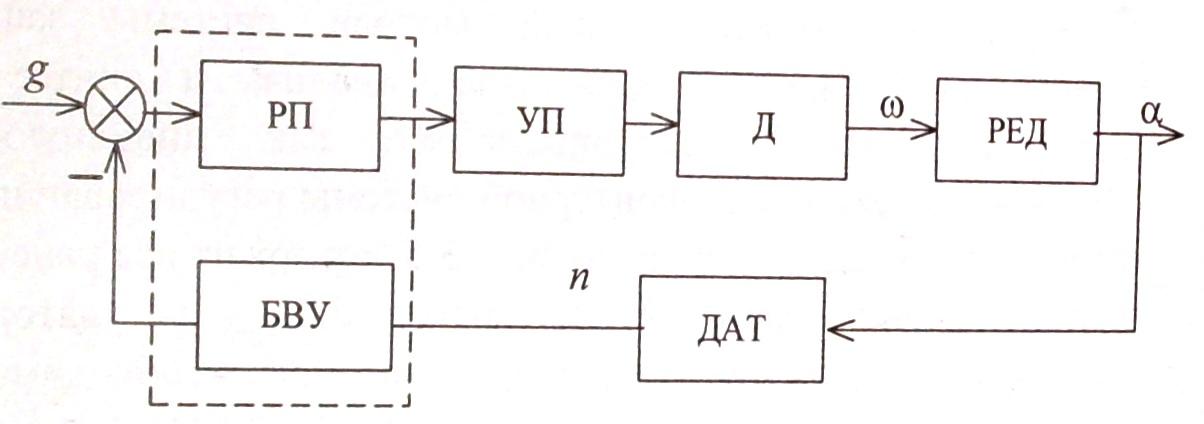
Содержит все ранее перечисленные элементы, а так же РП - регулятор положения, БВУ – блок вычисления угла WБВУ(s)=1/kДАТ
Передаточная функция двигателя имеет вид
![]()
Существенное
влияние на значение некомпенсируемой
постоянной времени Ти
оказывает дискретность датчика, а также
задержки в ПЭВМ. Задержки, возникающие
из-за дискретности датчика, зависит от
скорости вращения вала двигателя, при
малых скоростях анна возрастает. Учитывая
это, в первом приближении можно принимать
значение некомпенсируемой постоянной
времени контура положения
![]() .
.
Синтез замкнутой системы можно провести исходя из требований минимального времени регулирования, что соответствует настройке контура на модульный оптимум. В этом случае необходимо обеспечить ПФ разомкнутой системы контура в виде
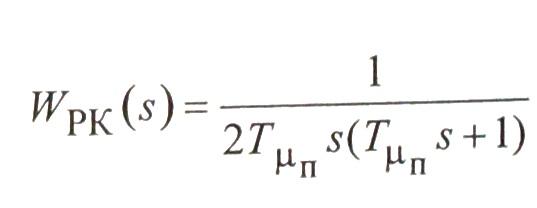
ПФ в соответствия разомкнутого контура в соответствии с рисунком
![]()
откуда
![]()
Подставив ПФ всех звеньев, получим ПФ регулятора
![]()
Получили ПД-регулятор,
который физически нереализуем, так как
степень полинома числителя выше степени
полинома. Проанализируем возможность
замены ПД-регулятора на П-регулятор,
т.е.
![]() Запишем ПФ разомкнутой системы для
этого случая
Запишем ПФ разомкнутой системы для
этого случая

Для упрощения
дальнейших расчетов пренебрежем членом
![]() и представим ПФ разомкнутой системы в
виде
и представим ПФ разомкнутой системы в
виде

Для анализа полученного результата запишем ПФ замкнутого контура
ПФ представляется в виде колебательного звена
Подставим значения
![]()
При
![]() переходный процесс в системе является
апериодическим, а при
переходный процесс в системе является
апериодическим, а при
![]() перерегулирование в системе составляет
4,3%, а время переходного процесса
минимально. Можно найти коэффициент
регулятора положения
перерегулирование в системе составляет
4,3%, а время переходного процесса
минимально. Можно найти коэффициент
регулятора положения
![]()
Для системы регулирования положения в общем случае требуется построение трехконтурной системы (тока, скорости и положения). При посторенние маломощных систем можно отказаться от контура тока, перейдя к двухконтурной системе. В нее добавили БВС – блок вычисления скорости, датчик скорости, датчик положения.
Не компенсируемая
постоянная времени в контуре скорости
можно оценить как
![]()
Контур скорости
ПФ разомкнутого контура скорости

Вычисляет скорость, приведенную к валу двигателя
Исходя из оптимум ПФ разомкнутого контура скорости должна быть
![]()
Тогда получает ПФ регулятора скорости
![]()
Контур положения
ПФ замкнутого контура скорости
![]()
Некомпенсируемая
постоянная времени контура положения
равна
![]() .
ПФ разомкнутого контура положения
.
ПФ разомкнутого контура положения
![]() и
при настройке на модульный оптимум
и
при настройке на модульный оптимум
![]() откуда ПФ регулятора положения
откуда ПФ регулятора положения

В результате получен П-регулятор положения с коэффициентом передач
![]()
В данном случае
имеем линейную зависимость входного
параметра регулятора от рассогласования
(![]() )
на его входе. Такой регулятор обеспечивает
хороший переходный процесс при отработке
малых и средних перемещений, когда
скорость двигателя не достигает мах
значения. При отработке больших
рассогласований требуется нелинейный
регулятор. Необходим регулятор со
статической характеристикой
)
на его входе. Такой регулятор обеспечивает
хороший переходный процесс при отработке
малых и средних перемещений, когда
скорость двигателя не достигает мах
значения. При отработке больших
рассогласований требуется нелинейный
регулятор. Необходим регулятор со
статической характеристикой
![]() При этом
При этом
![]() .
.
Расчет нелинейного регулятора положения в общем случае для непрерывной системы регулирования приводит к следующему результату:
 5
5
![]() =1,2
– максимальная скорость двигателя
=1,2
– максимальная скорость двигателя
Поведение системы при линейно возрастающей и квадратичном воздействиях.
Исследуемая система имеет астатизм первого порядка. Ошибка регулирования при линейно возрастающем воздействии постоянна, а при квадратичном – стремится к бесконечности.
Скорость вращения двигателя при наличии редуктора можно рассчитать по формуле
Для линейно
возрастающего воздействия![]() заданная скорость вращения двигателя
составит
заданная скорость вращения двигателя
составит

![]()
Максимальное значение скорости нарастающего воздействия
![]()
Для квадратичного
воздействия
![]() заданная
скорость вращения двигателя составит
заданная
скорость вращения двигателя составит

![]()
При любом квадратичном воздействии через некоторое время tX скорость вращения двигателя достигнет своего МАХ значения. Зависимость этого времени от g0 b max значения скорости
![]()