

Курсовые работы / подъема шасси спортивного самолета / Графическая_часть
.docСТРУКТУРНАЯ СХЕМА САУ
З – задатчик (датчик высоты или АСУ ТП);
– задатчик (датчик высоты или АСУ ТП);
ВУ – микропроцессор Z-80А
У – усилительное звено LM675
Д
![]()
Н – насос НВТ 1 -0,4 -1984
0.000015
Uз ∆U U
Q,р![]()

Г
1
8
ГП![]()








 П
–гидропривод MAXIMA 350
П
–гидропривод MAXIMA 350
Uд
Д
0.07


Передаточные функции элементов САУ
ИССЛЕДОВАНИЕ ИСХОДНОЙ СИСТЕМЫ
Передаточная функция разомкнутой системы:
![]()
Передаточная функция замкнутой системы:
![]() .
.
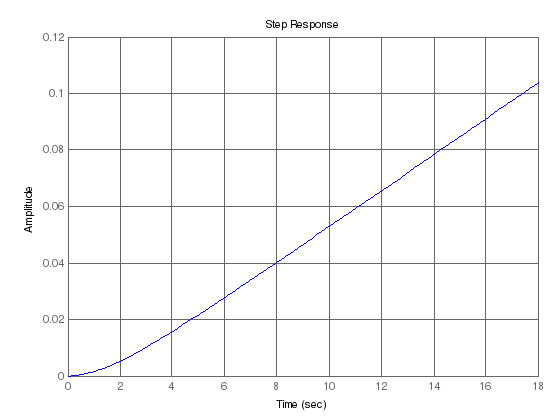
 Переходный
процесс в замкнутой системе
Переходный
процесс в замкнутой системе
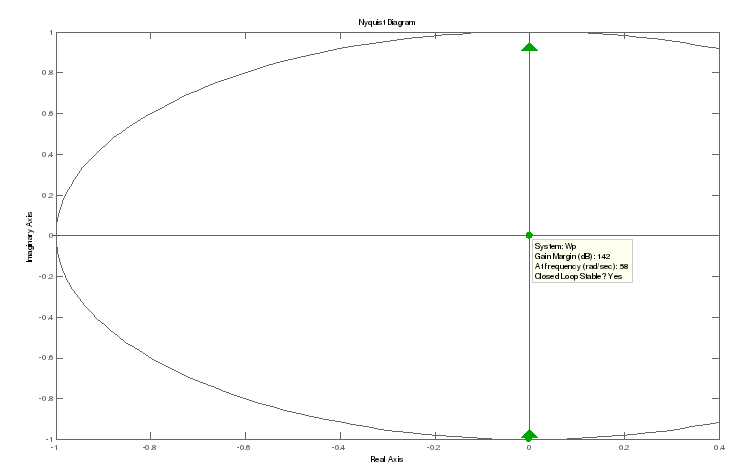
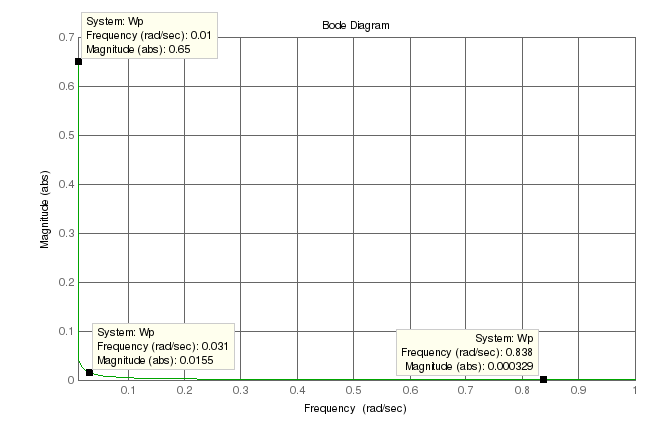
АЧХ разомкнутой системы АФЧХ разомкнутой системы
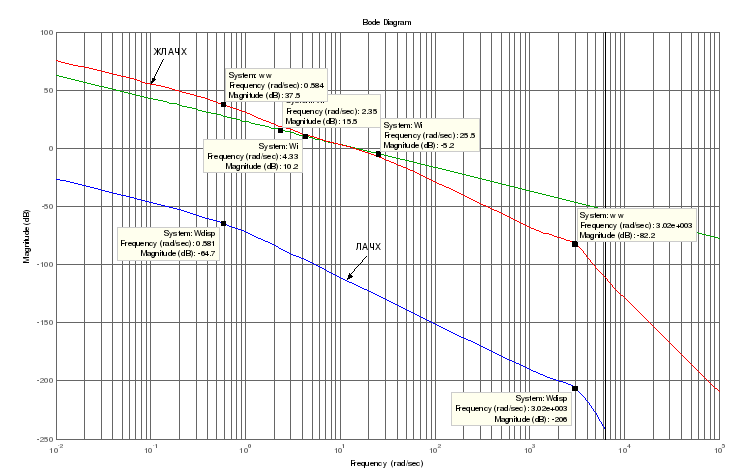
СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ЗАПРЕТНОЙ ЗОНЫ
Зададим скорость
g’= 27 и ускорение обработки g’’=120
информации, а также показатель
колебательности M=1.2, max ошибка регулирования
=0,2
(Amax=0.65)
=g’’/g’=120/27=4.44
рад/с – псевдочастота A=
Amax/=0.65/0.2=3.25
![]() Дб
тогда координаты рабочей точки (4.44
рад/с, 10.2 дБ)
Дб
тогда координаты рабочей точки (4.44
рад/с, 10.2 дБ)
 Передаточная
функция замкнутой системы, скорректированной
методом запретной зоны, будет иметь
вид:
Передаточная
функция замкнутой системы, скорректированной
методом запретной зоны, будет иметь
вид:![]()
Амплитуды сопрягающих частот
L1=![]()
L2=![]()
РАЗРАБОТКА НЕПРЕРЫВНОГО ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА

В случае последовательного корректирующего устройство полученного методом корневого годографа оно может быть реализовано в виде усилителя с коэффициентом усиления 15
В случае последовательного корректирующего устройства, полученного методом Солодовникова желаемую передаточную функцию корректирующего звена можно реализовать двумя дифференцирующими четырехполюсниками с разделительным усилителем

ЛАЧХ корректирующих звеньев
Передаточная функция четырехполюсника:
 ,
KK1=R2/(R1+R2)=0,4255;
,
KK1=R2/(R1+R2)=0,4255;
T1=R1*C1=0,0392; T2=KK1*T1=0,0921.
Схема последовательного корректирующего устройства
При этом усилитель должен иметь коэффициент усиления: Ку=1249/0.0921= 13565
ИССЛЕДОВАНИЕ ДИСКРЕТНОЙ СИСТЕМЫ
Перейдем от непрерывной модели объекта к дискретной с интервалом дискретизации 0.001 c, используя экстраполятор нулевого порядка. Передаточная функция разомкнутой дискретной системы:

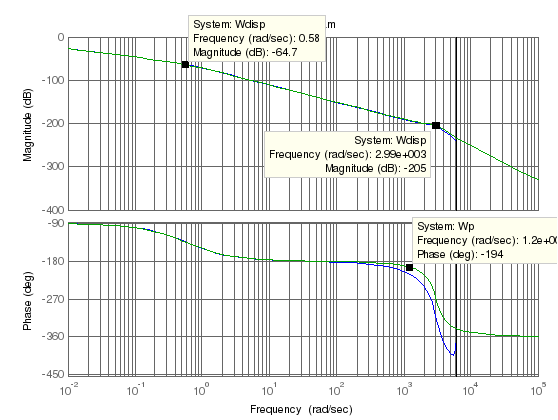
ЛАЧХ непрерывной и дискретной разомкнутых систем
ЛАЧХ дискретной
модели строится в зависимости от
псевдочастоты λ, при этом сначала
п![]() роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется переход от W(ω) к
частотному выражению передаточной
функции через псевдочастоту λ путем
замены ω=0.5Tsλj.
роводится
ω-преобразование заменяя z=(1+ω)/(1-ω), а
затем осуществляется переход от W(ω) к
частотному выражению передаточной
функции через псевдочастоту λ путем
замены ω=0.5Tsλj.
РАЗРАБОТКА ДИСКРЕТНОГО ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
П ередаточной
функции дискретного последовательного
корректирующего устройства в формате
цифрового фильтра:
ередаточной
функции дискретного последовательного
корректирующего устройства в формате
цифрового фильтра:
соответствует разностное уравнение
![]() ,
,
П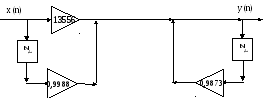 ри
этом множитель z-1=e-pT,
представляет собой оператор задержки,
то есть z-1*Uk=Uk-1,
z-2*Uk=Uk-2
и т. д.
ри
этом множитель z-1=e-pT,
представляет собой оператор задержки,
то есть z-1*Uk=Uk-1,
z-2*Uk=Uk-2
и т. д.
Схема реализации разностного уравнения
В данном
случае
![]() Схема последовательного дискретного
корректирующего устройства
Схема последовательного дискретного
корректирующего устройства
ВЫБОР КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА

![]()
1. WkU=![]()

2.
3.
![]()
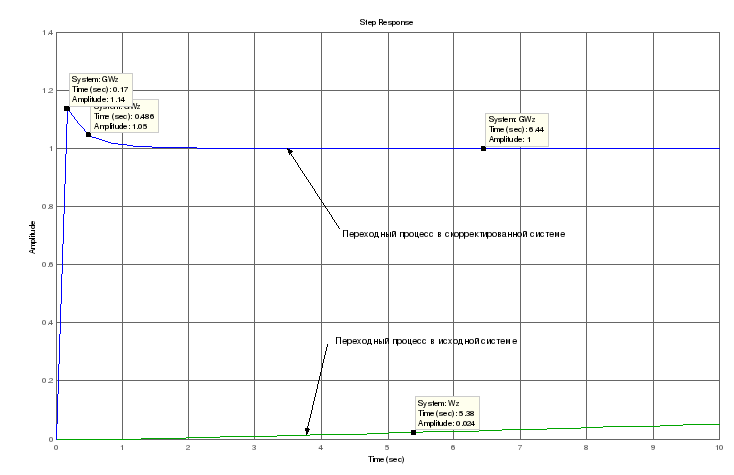
П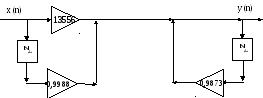 ереходные
процессы в замкнутой системе при
различных способах коррекции
ереходные
процессы в замкнутой системе при
различных способах коррекции