

2.5 Выбор микропроцессора
Для корректной работы системы не требуется высокопроизводительного микропроцессора. Исходя из требуемых технических характеристик и экономической эффективности выбираем процессор Siemens 80C31.
Технические характеристики микропроцессора сведены в таблицу 3.
Таблица 3 – Технические характеристики микропроцессора
|
Технические характеристики |
Значение |
|
Тактовая частота, МГц |
33 |
|
ROM, кбайт |
4 |
|
RAM, байт |
128 |
|
Количество счетчиков |
2 |
|
Число линий ввода/вывода |
32 |
|
Напряжение питании, В |
2,7 – 5,5 |
|
Рабочий интервал температур, ˚С |
-55 - + 125 |
Передаточная функция микропроцессора является стандартной:
WМ(p) = 1.
2.6 Расчет передаточной функции системы
Структурная схема системы с передаточными функциями представлена на
рисунке 4. В данной схеме отсутствует усилитель. Это связано с тем, что элек-
тронасос питается напряжением 12 В.
Задатчик УС W(p)= W(p)= W(p)= W(p)
= 0,76 IЗ U L IД P2 P3 Микропроцессор W(p) = 1 P Задатчик УС IЗ U P3 Микропроцессор WМ(p)
= 1 P

![]()
![]()
![]()


















WН(p)=![]()
WДЕ(p)= P2![]()



WЧ(p)=![]()
WД(p)
= 0,76 L IД



Рисунок 4 – Структурная схема системы с передаточными функциями
Передаточная функция замкнутой системы вычисляется по формуле:
WЗ(р)
=
![]() . (12)
. (12)
Произведем вычисления, используя Mathcad:

В полученной передаточной функции характеристическое уравнение имеет четвертый порядок.
3 ОБОСНОВАНИЕ ВЫБОРА ДАТЧИКА ИЗ СПРАВОЧНОЙ
ЛИТЕРАТУРЫ
В струйном принтере оптический датчик уровня чернил не является унифицированным элементом, т. к. разрабатывается для конкретной модели принтера. Датчик должен обладать малыми габаритами, малой массой, высокой надежностью.
Проведя литературный поиск можно выделить наиболее подходящий по техническим характеристикам датчик. Таким датчиком является миниатюрный датчик серии MS. Этот датчик отличается компактной структурой (8×10×16), высокой степенью защиты (IP67).
Общие технические характеристики датчика серии MS сведены в таблицу 4.
Таблица 4 - Общие технические характеристики
|
Напряжение питания |
10-30 В, пульсации менее 20 % |
|
Выход |
NPN и PNP транзистор |
|
Максимально допустимый ток нагрузки |
150 mA |
|
Ток утечки |
Менее 0,8 ma |
|
Схема защиты |
Защита от КЗ и переполюсовки |
|
Время отклика |
2 мс |
|
Излучение |
Инфракрасное, 660 нм |
|
Гистерезис |
10 % |
|
Рабочая температура/влажность |
От -20 до +60˚С/35%-85% |
4 РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ
Передаточная функция замкнутой системы имеет вид:
WЗ(р)
=
![]() .
.
Первым (необходимым) условием устойчивости является положительность всех членов характеристического уравнения. Характеристическое уравнение имеет вид:
1,34∙1015∙р4 + 3,34∙1019∙р3 – 1,83∙1011∙р2 + 0,25∙р + 1,23 = 0.
Условие не выполняется, следовательно система является не устойчивой.
Данная система нуждается в корректировке.
Для построения ЛАЧХ разомкнутой системы вычислим передаточную функция разомкнутой системы:
WР(р) = WМ(р)∙WН(р)∙WДЕ(р)∙WЧ(р)∙WД(р) (13)
Произведем вычисления, используя Mathcad:

П о
данной передаточной функции разомкнутой
системы построим ЛАЧХ. Построение
произведем используя MATLAB
(рисунок 5).
о
данной передаточной функции разомкнутой
системы построим ЛАЧХ. Построение
произведем используя MATLAB
(рисунок 5).
Рисунок 5 – ЛАЧХ линейной системы
Построим ЛАЧХ корректирующего устройства графическим методом. Требования к качеству переходного процесса:
tР = 2, σ% = 25.
Построим среднечастотный участок желаемой ЛАЧХ. Исходя из заданного перерегулирования σ% = 25, по номограммам Солодовникова на рисунке 6 определим запас устойчивости по модулю L1=│L2│, ограничивающий среднечастотный участок ЛАЧХ, частоту положительности ωn:
ωn
=
![]() ,
(14)
,
(14)
где N – коэффициент пропорциональности, соответствующий найденному значению Pmax.
При σ% = 25%: Рmax = 1,22; N = 4; L1=│L2│ = 20 дБ.
ωn
=
![]() = 2π = 6,28.
= 2π = 6,28.
Определим частоту среза:
wСР = (0,6-0,9)∙wn, (15)
w СР
= 0,8∙6,28 = 5,024 с-1.
СР
= 0,8∙6,28 = 5,024 с-1.
Рисунок 6 – Номограммы для определения параметров желаемой ЛАЧХ
Для построения ЖЛАЧХ через частоту среза проводим прямую с наклоном –20 дБ/дек до пересечения ее с прямыми, параллельными оси частот и проходящими через точки L1= 20 дБ и L2 = - 20 дБ.
Низкочастотный участок имеет наклон – 40 дБ/дек, высокочастотный участок проходит параллельно ЛАЧХ.
График желаемой ЛАЧХ представлен на рисунке 7.
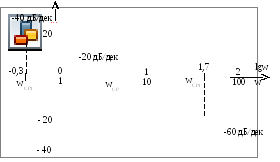
Рисунок 7 – График желаемой ЛАЧХ
По графику желаемой ЛАЧХ определим частоты среза:
wСР1 = 0,5 с-1;
wСР2 = 51 с-1.
Для нахождения ЛАЧХ корректирующего устройства вычтем графически из желаемой ЛАЧХ реальную ЛАЧХ. График ЛАЧХ корректирующего устройства представлен на рисунке 8.
Определим по графику частоты среза:
wСР1 = 1,65∙10-6 c-1;
wСР2 = 0,5 c-1;
wСР3 = 50,1 с-1.
Постоянная времени вычисляется по формуле:
Т
=
![]() .
(16)
.
(16)
Вычислим значения Т:

Рисунок 8 – ЛАЧХ корректирующего устройства
Т1
=
![]() = 606060,6 с;
= 606060,6 с;
Т2
=
![]() = 2 с;
= 2 с;
Т3
=
![]() = 0,02 с.
= 0,02 с.
По стандартным наклонам запишем передаточную функцию корректирующего устройства.
WКУ(р)
=
![]() .
.
Для осуществления коррекции системы будем использовать корректирующее устройство последовательного типа, так как оно обеспечивает простую схему
включения, расширяет полосу пропускания частот, не требует сложных элементов для согласования, передает значительные величины управляющих сигналов.
Представим передаточную функцию корректирующего устройства в виде последовательно соединенных схем 1 и 2 (рисунок 9 и 10).
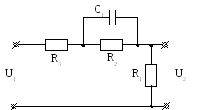
Рисунок 9 – Схема корректирующего устройства 1

Рисунок 10 - Схема корректирующего устройства 2
Подберем и рассчитаем параметры корректирующих устройств. Для устройства 1 зададим значение емкости С1 = 10 мкФ и сопротивления R2 = 5 кОм. Значение сопротивления R3 вычисляется по формуле:
R3
=
![]() ,
(17)
,
(17)
R3
=
![]() = 60606,1 Мом.
= 60606,1 Мом.
Сопротивление R1 вычисляется по формуле:
R1
=
 ,
(18)
,
(18)
R1
=
 = 1212121,1 МОм.
= 1212121,1 МОм.
Произведем вычисления для устройства 2. Зададим значение емкости С2=10 мкФ. Величина сопротивления R4 определится:
R4
=
![]() ,
(19)
,
(19)
R4
=
![]() = 200 кОм.
= 200 кОм.
Зададим значение R5 = 10 кОм. Сопротивление R6 вычислим по формуле:
R6
=
![]() (20)
(20)
R6
=
![]() = 199,9 кОм.
= 199,9 кОм.
Корректирующие устройства устанавливаются в систему после микропроцессора (рисунок 11).
Эл.
насос Демпферная емкость Чернильница Датчик
уровня МП Корректирующие
устройства 1 и 2









Рисунок 11 – Структурная схема САР с учетом последовательных
корректирующих устройств
Вычислим передаточную функцию замкнутой системы с учетом последовательных корректирующих устройств:
WЗК(р)
=
![]() ,
(21)
,
(21)
Вычисления произведем используя Mathcad:


Первым (необходимым) условием устойчивости является положительность всех членов характеристического уравнения. Характеристическое уравнение имеет вид:
1,07∙1010∙р7 + 2,69∙1014∙р6 + 4,02∙1016∙р5 + 2,01∙1018∙р4 + 3,34∙1019∙р3 -
- 1,83∙1011∙р2 + 7,48∙105∙р + 1,23 = 0.
Условие не выполняется, следовательно система неустойчива.
Построим переходный процесс системы. Произведем обратное преобразование Лапласа:
![]()
![]()
График переходного процесса представлен на рисунке 12.
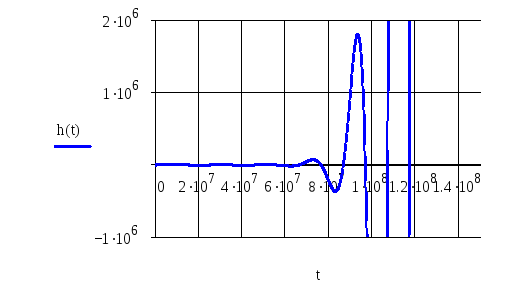


Рисунок 12 – Переходный процесс системы
В ходе проведения корректирования аналоговая система осталась неустойчивой. Можно сделать вывод о том, что аналоговая система не поддается корректированию. В данной системе необходимо произвести программное корректирование.
Рассмотрим основные способы программирования корректирующих устройств.
5 ОСНОВНЫЕ СПОСОБЫ ПРОГРАММИРОВАНИЯ
КОРРЕКТИРУЮЩИХ УСТРОЙСТВ
5.1 Прямое программирование
Представим передаточную функцию корректирующего устройства в виде:
W(z)
=
 .
(22)
.
(22)
По передаточной функции W(z) определим разностное уравнение:
![]() .
(23)
.
(23)
В уравнение (23) можно выделить две части:
![]() ,
(24)
,
(24)
![]() .
(25)
.
(25)
Тогда:
![]() (26)
(26)
 Построим
структурную схему программирования
(рисунок 13):
Построим
структурную схему программирования
(рисунок 13):
Рисунок 13 – Структурная схема программирования
5.2 Последовательное программирование
Представим передаточную функцию корректирующего устройства в виде:
 (27)
(27)
Произведем замену:
![]() ,
,
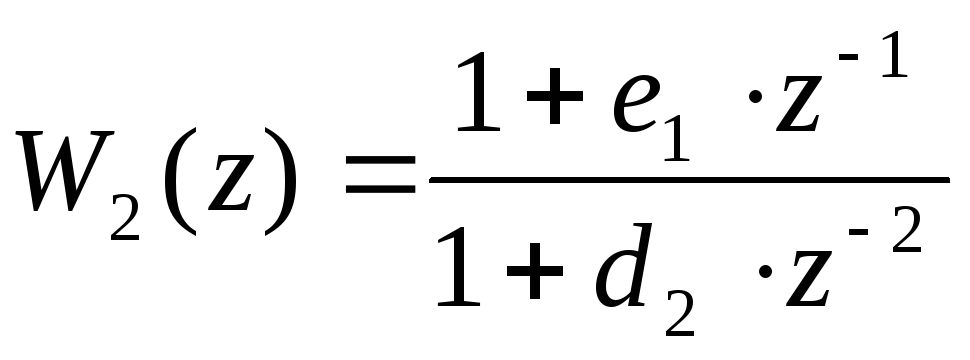 ,
,
 .
.
В результате получим:
W(z) = W1(z)∙W2(z) ∙∙∙ Wn(z).
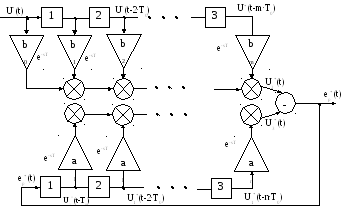
Структурная схема для последовательного программирования представлена на рисунке 14.

Рисунок 14 – Структурная схема корректирующего устройства при
последовательном программирование
5.3 Параллельное программирование
Передаточная функция корректирующего устройства приводится к виду:
![]() (28)
(28)
Произведем замену:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Структурная схема корректирующего устройства при параллельном программировании представлена на рисунке 15.

U(z)
Рисунок 15 – Структурная схема корректирующего устройства
при параллельном программировании
Также существует последовательно-параллельное программирование корректирующих устройств.