

2.3 Датчик температуры co-3m-01
В качестве датчика температуры возьмем терморезистор.Терморезисторы относятся к параметрическим датчикам температуры, поскольку их активное сопротивление зависит от температуры. Терморезисторы называют также термометрами сопротивления или термосопротивлениями. Они применяются для измерения температуры в широком диапазоне от -270 до 1600 °С.
Если терморезистор нагревать проходящим через него электрическим током, то его температура будет зависеть от интенсивности теплообмена с окружающей средой. Так как интенсивность теплообмена зависит от физических свойств газовой или жидкой среды (например, от теплопроводности, плотности, вязкости), в которой находится терморезистор, от скорости перемещения терморезистора относительно газовой или жидкой среды, то терморезисторы используются и в приборах для измерения таких неэлектрических величин, как скорость, расход, плотность и др.
Различают металлические и полупроводниковые терморезисторы. Металлические терморезисторы изготовляют из чистых металлов: меди, платины, никеля, железа, реже из молибдена и вольфрама. Для большинства чистых металлов температурный коэффициент электрического сопротивления составляет примерно (4—6,5) • 10~3 1/°С, т. е. при увеличении температуры на 1 °С сопротивление металлического терморезистора увеличивается на 0,4—0,65 %. Наибольшее распространение получили медные и платиновые терморезисторы
Исходя из технического задания в качестве датчика температуры принимаем прибор контроля и автоматического управления системой сигнализации обледенения CO-3M-01
Основные технические характеристики:
|
Напряжение питания |
переменное 220 +/- 20 В |
|
Измеряемый диапазон обледенения |
0 - 200 ед. (%) |
|
Измеряемый диапазон температуры |
-50 / +99 град. С. |
|
Точность измерения температуры |
+/- 1 град. С. |
|
Точность хода внутренних часов |
+/- 0,2 сек. в сутки |
|
Режим связи с персональным компьютером |
последовательный интерфейс RS232 |
|
Скорость обмена |
1200 бод.- 9600 бод. |
|
Отображаемая информация |
2 строки по 16 символов |
|
Время сканирования (рабочий цикл измерения) |
50-80 сек. |
|
Время реакции на аварийную ситуацию |
2-5 сек |
|
Объем памяти событий |
более 2000 событий |
|
Рабочий диапазон температуры эксплуатации прибора |
+10 ... +45 град. С. |
|
Рабочий диапазон температуры эксплуатации первичного датчика |
- 55 ...+55 град. С. |
Произведем расчет чувствительности датчика, для нахождения его передаточной функции..
Сопротивление металлического проводника R зависит от температуры:
![]() (4)
(4)
где С — постоянный коэффициент, зависящий от материала и конструктивных размеров проводника;
а — температурный коэффициент сопротивления;
е — основание натуральных логарифмов.
Абсолютная температура (К) связана с температурой в градусах Цельсия соотношением
Т К= 273 + Т °С. (5)
Определим относительное изменение сопротивления проводника при его нагреве. Пусть сначала проводник находился при начальной температуре Т0 и имел сопротивление R0.При нагреве до температуры Т его сопротивление RT= СеαT. Возьмем отношение RT и R0:
![]() (6)
(6)
Известно, что функцию вида е* можно разложить в степенной ряд:
![]() (7)
(7)
Для нашего случая х =α(Т-T0). Так как величина а для меди сравнительно мала и в диапазоне температур до +150 °С может быть принята постоянной
α = 4,3 • 10 -3 1/°С, то и произведение α(Т-T0) в этом диапазоне температур меньше единицы. Поэтому не будет большой ошибкой пренебречь при разложении членами ряда второй степени и выше:
 (8)
(8)
Выразим сопротивление при температуре Т через начальное сопротивление при Т0
![]() (9)
(9)
Медные терморезисторы выпускаются серийно и обозначаются ТСМ (термосопротивления медные) с соответствующей градуировкой: гр. 23 имеет сопротивление 53,00 Ом при О °С; гр. 24 имеет сопротивление 100,00 Ом при О °С. Медные терморезисторы выполняются из проволоки диаметром не менее 0,1 мм, покрытой для изоляции эмалью.
Для металлического терморезистора чувствительность можно получить дифференцируя (5). Следовательно Sд=α. Именно температурный коэффициент сопротивления определяет чувствительность.
α = 4,3 • 10 -3 1/°С (10)
Приведем таблицу, где показана зависимость сопротивления медного терморезистора от температуры.
Таблица 1
|
Температура, °С |
Сопротивление, Ом |
|
-50 |
41,71 |
|
-30 |
46,23 |
|
-10 |
50,74 |
|
0 |
53,00 |
|
20 |
57,52 |
|
40 |
62,03 |
|
60 |
66,55 |
|
80 |
71,06 |
|
100 |
75,58 |
|
120 |
80,09 |
|
140 |
84,61 |
|
160 |
89,61 |
Т.к измеряемый диапазон измерения температуры датчика от -50 до 100°С, то можем определить максимальное и минимальное сопротивление.
При T= -50°С R=41,71 Ом;
При T=100°С R=75,58 Ом;
Найдем передаточную функцию датчика:
W(p)= U/T; (11)
где U=I*R; (12)
Таким образом
W(p)=![]() ;
(13)
;
(13)
I=![]() =12В/75,58
Ом=0,16 А;
(14)
=12В/75,58
Ом=0,16 А;
(14)
![]() =
α
для терморезисторов;
(15)
=
α
для терморезисторов;
(15)
W(p)=![]() =0,16*4,3*10-3
=0,68*10-3
=0,16*4,3*10-3
=0,68*10-3
2.4 Усилитель мощности ЭУ3-П
Выбираем электронный усилитель типа ЭУ3-П. Усилители данного типа чаще всего применяются в измерительных комплектах: термопара, компенсационный мост с усилителем или автоматический потенциометр.
Передаточная функция звена имеет вид:
![]() (16)
(16)
где Ку -коэффициент усиления электронного усилителя.
Ку =Uвых/Uвх=220/12=18
Подставляем известный коэффициент в формулу получим передаточная функция электронного усилителя имеет вид:
Wy(p)=18;
3 ДЕЛЕНИЕ ЛСУ НА ИЗМЕНЯЕМУЮ И НЕИЗМЕНЯЕМУЮ ЧАСТИ.
ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ
К неизменяемой части относят все элементы регулятора с передаточной функцией отличной от единицы. Следовательно, к ним можно отнести все элементы кроме микропроцессора.
Определим передаточную функцию системы, передаточная функция главной цепи будет:
![]() .
(17)
.
(17)
Передаточная функция разомкнутой системы будет:
![]() . (18)
. (18)
Передаточная функция замкнутой системы:
![]() . (19)
. (19)
По выражению (18) построим АФЧХ разомкнутой системы, изображенную на рисунке 2:

Рисунок 2 – АФЧХ разомкнутой системы
Согласно критерию Найквиста, замкнутая автоматическая система регулирования будет устойчивой, если АФХ разомкнутой системы не охватывает точку с координатами -1,j0 ,таким образом, имеем устойчивую систему с неограниченно большими запасами по амплитуде и фазе [3].
4 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК И ИХ
АНАЛИЗ
4.1 Построение ЛАЧX
Разомкнутая система образована двумя, соединенными последовательно, апериодическими звеньями, для которых частоты среза будут:
ω1=1/T1=2.67 рад/c,
ω1=1/T1=37.32 рад/c.
По выражению (18) построим ЛАЧХ и ЛФЧХ – рисунок 3, разомкнутой системы, а по выражению (19) построим переходный процесс в замкнутой системе - рисунок 4:

Рисунок 3 – ЛАЧХ и ЛФЧХ разомкнутой системы

Рисунок 4 – Переходный процесс в замкнутой системе
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=600 c;
Можно сделать вывод, что система является устойчивой с неограниченно большими запасами по амплитуде и фазе, но характеристики переходного процесса системы не удовлетворяют заданным. То есть, необходима коррекция системы.
4.2 Построение ЖЛАЧХ
Для начала определим частоты сопряжения для цифровой системы. Аппроксимировать ЛАЧХ можно двумя методами: непосредственная аппроксимация графика ЛАЧХ или нахождение частот сопряжения из передаточной функции системы. Проведем достаточно точную аппроксимацию исходной ЛАЧХ (рис. 3).
Теперь воспользуемся методом синтеза ЖЛАЧХ, используя номограмму Солодовникова (рис. 4).

Рисунок 5 – Номограмма Солодовникова
Запретная зона строится исходя из скоростных характеристик цифровой системы, которые заданны в техническом задании.
Определим положение рабочей точки.
Псевдочастота
рабочей точки
![]() ;
;
Амплитуда рабочей
точки
![]() ;
;
Найдем логарифмическую А: 20log(A)=-25.6 дБ;
Т.о., РТ(4; -25.6) – координаты рабочей точки.
Зададим время регулирование tp=10 c и величину перерегулирования σ=30%,колебательности (М=1.3), тогда, согласно номограмме Солодовникова, Рмах составит 1.27, а частоту среза найдем из формулы:
![]()
![]()
Таким образом, ωср=1.1 рад/с.
Определим ограничивающие асимптоты:
![]() =20lg(
=20lg(![]() )=-4.68;
)=-4.68;
![]() =20lg(
=20lg(![]() )=10.88;
)=10.88;
Необходимо провести прямую с наклоном 20 дБ/дек, через частоту среза до пересечения с ограничивающими асимптотами.
В логарифмическом масштабе (4;-25.6). Через эту точку проводим низкочастотную асимптоту с наклоном минус 20 дБ/дек.
За пределами полосы, ограниченной заданной колебательностью, ЖЛАЧХ совпадает по наклону с низкочастотной частью построенной ЛАЧХ.
Правее
![]() ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ
ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ
Исходную ЛАЧХ и ЖЛАЧХ разомкнутой системы, построенную методом Солодовникова изобразим на рисунке 6.
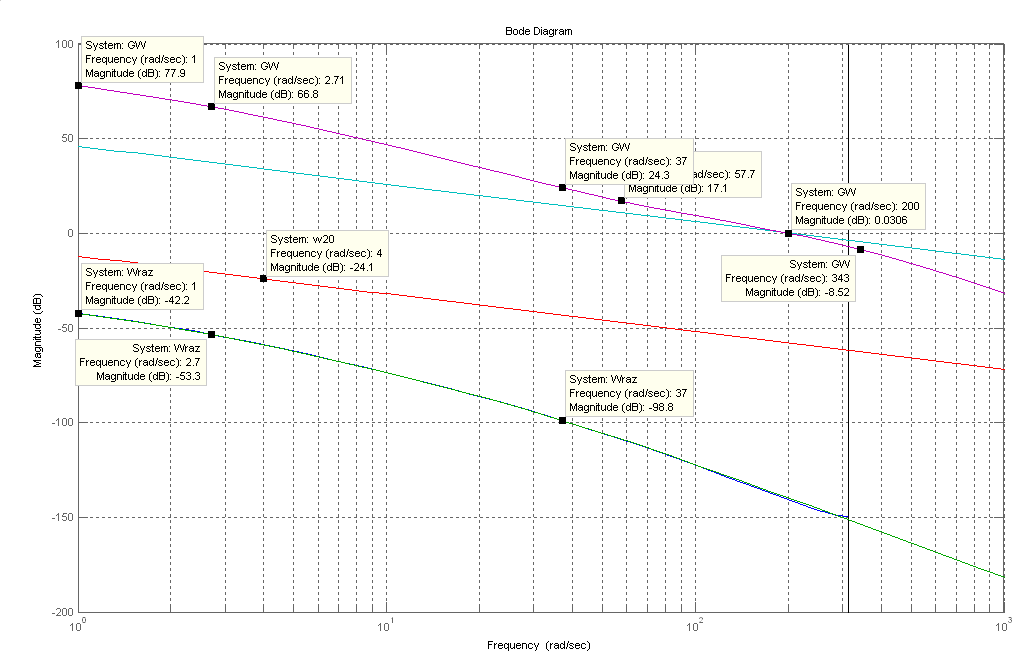
Рисунок 6 – ЖЛАЧХ, построенная методом Солодовникова
Передаточная функция разомкнутой системы, скорректированной методом Солодовникова, будет иметь вид:
![]() .
(21)
.
(21)
Передаточная функция замкнутой системы, скорректированной методом Солодовникова, будет иметь вид:
![]() .
.
=![]() (22)
(22)
Тогда переходный процесс в замкнутой системе скорректированной методом Солодовникова изобразим на рисунке 7:

Рисунок 7 – Переходный процесс в замкнутой системе, скорректированной методом Солодовникова
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=12 c;
Данные показатели качества удовлетворяют заданным требованиям. Несоответствие показателей качества с их расчетными значениями объясняются значительным отличием вида вещественной частотной характеристики скорректированной системы от типовой, по которой составлены номограммы.
Определим желаемую
передаточную функцию последовательного
корректирующего устройства: ![]() (23)
(23)
Построим ЛАХЧ
последовательного корректирующего
устройства
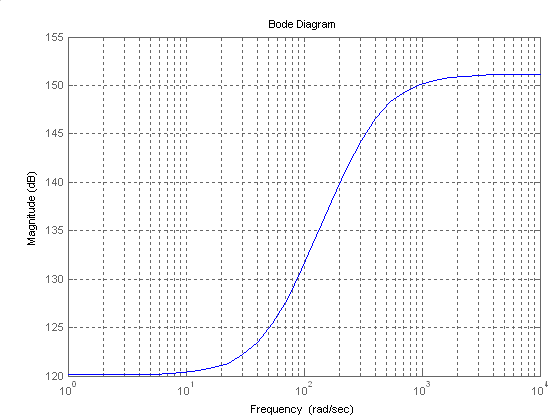
Рисунок 8 – ЛАЧХ последовательного корректирующего устройства
Найдем передаточную функцию соответствующего параллельного корректирующего устройства:
Wpark=Wraz*(Wk-1) (24)
![]() (25)
(25)
Найдем передаточную функцию соответствующего встречно-параллельного корректирующего устройства:
Wvpark=(1-Wk)/(Wraz*Wk) (26)
![]() (27)
(27)
5 СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
5.1 Синтез последовательного корректирующего устройства
Задача синтеза, возникающая при проектировании системы автоматического регулирования, заключается в таком выборе структурной схемы системы и технических средств ее реализации, при котором обеспечиваются требуемые динамические и эксплуатационные свойства всей системы в целом.
Для нашей системы определяющим параметром является быстродействие.. Передаточная функция необходимого КУ была найдена на предыдущем этапе, теперь требуется определить структурную схему КУ, его элементную базу и параметры необходимых элементов.
Для реализации выбираем последовательное корректирующее устройство, так как его наиболее просто реализовать;
Wk=GW/Wraz (28)
![]() (29)
(29)
При таком виде ЛАЧХ КУ по справочнику находим вид КУ. Получаем, что при таком виде ЛАЧХ корректирующего устройства, желаемую передаточную функцию корректирующего звена можно реализовать двумя одинаковыми дифференцирующими четренцирующими четс разделительным усилителем изобразим его схему на рисунке 9.

Рисунок 9 -Схема корректирующего устройства
Передаточная функция дифференцирующего четырехполюсника:
 ; (30)
T1=R1∙C1=
0.0173;
; (30)
T1=R1∙C1=
0.0173;
T2=KK1∙T1=0.0029. KK1=R2/(R1+R2)=0.16;
При этом усилитель должен иметь коэффициент усиления:
![]() (31)
(31)
5.2 Синтез программного корректирующего устройства
Разработаем последовательное дискретное корректирующее устройство:
Перейдем к дискретной передаточной функции:
Wkdis=c2d(Wk,0.01)
Wkdis=![]() (32)
(32)
![]() (33)
(33)
Домножим числитель и знаменатель на 1/z2, тогда:
![]() (34)
(34)
Запишем разностное уравнение в реальном масштабе времени:
![]()
;Расчет разностного уравнения
; x - входной сигнал
; y- выходной сигнал
i_port EQU 1lh; номер порта для чтения
o_port EQU 12h; номер порта для записи
Al EQU 1.5118;
А2 EQU 2.102;
А3 EQU 1.6347;
А4 EQU 1.627;
B1 EQU 4.1343;
B2 EQU 2.6894;
B3 EQU 4.3111;
xl, x2, x3 DB 0
;выделение памяти под переменные x(k-l), x(k-2), x(k-3)
yl,y2, y3, DB 0
; выделение памяти под переменные y(k-l), y(k-2)
; вычисляем значение выражения
y(k)=Al*х1+А2*х2+А3*х3+В1*у1+В2*у2+В3*у3
start: ;метка начала цикла коррекции
in al, i_port; чтение данных из порта
mov al,Al; вычисление слагаемого А1*х1
mov bl, al; сохранение результата в bl
; в результате имеем А1*х1 в регистре bl
mov al, X2; вычисление
mul al, А2; слагаемого А2*х2
add bl, al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2 в регистре bl
mov al, X3; вычисление
mul al, А3; слагаемого А3*х3
add bl, al; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2+А3*х3 в регистре bl
mov al, yl; вычисление
mul al, Bl; слагаемого Bl*yl
add bl, al; прибавление к предыдущему результату
mov al, y2; вычисление
mul al, B2; слагаемого В2*у2
add bl, al; прибавление к предыдущему результату
; в регистре bl имеем результат вычисления всего выражения
mov y3, y2; для следующего такта
mov y2, y1;
mov yl, bl
mov x2, xl;
mov xl, x;
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы