

5 Построение лачх системы и ее анализ
Передаточная функция разомкнутой системы с учетом дискретности и фиксатора нулевого порядка имеет вид

Проведем - преобразование, z = (1+) / (1-).

Сделав замену =0,5T0s, где T0 = 0,05 с – период дискретности, получим
 .
.
Частоты среза
0,05 Гц = -20 дБ/дек; log(0,05)=-1,3;
6,807 Гц = -20 дБ/дек; log(6,807)=0,833;
15,96 Гц = -20 дБ/дек; log(15,96)=1,2;
40,36 Гц = +20 дБ/дек; log(40,36)=1,605;
45,11 Гц = +20 дБ/дек; log(45,11)=1,654;
156,5 Гц = +20 дБ/дек; log(156,5)=2,194.
По полученной передаточной функции строим ЛАЧХ системы от псевдочастоты .
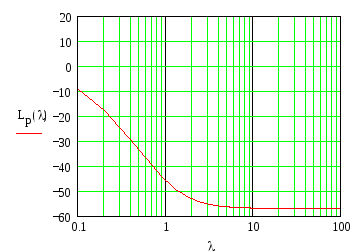
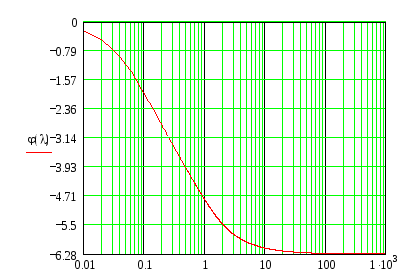
Рисунок 7 – ЛАЧХ и ЛФЧХ нескорректированной системы.
Запасы устойчивости: по амплитуде = 26,8 дБ, по фазе около 1800.
Запасы устойчивости по фазе не удовлетворяют техническому заданию, следовательно требуется коррекция.
6 Построение жлачх
ЖЛАЧХ для дискретных систем строится методом запретной зоны. Находим координаты рабочей точки, через которую проходит граница запретной зоны по параметрам, которые были заданы в техническом задании.
Частота контрольной точки:
![]() ,
,
где
![]() -максимальное
ускорение входного сигнала, рад/с2;
-максимальное
ускорение входного сигнала, рад/с2;
![]() -
максимальной скорости изменения входного
сигнала, рад/с;
-
максимальной скорости изменения входного
сигнала, рад/с;
![]() рад/с.
рад/с.
Рабочая амплитуда:
![]() ;
; ![]() рад/с.
рад/с.
Ордината рабочей точки:
![]() ,
,
где максимальная ошибка, рад;
![]() .
.
Координаты рабочей точки:
В(к;20lgА1);
20lgA1=20lg91.2=39.2 дБ;
В(1,25;39,2)
Через эту точку проводим низкочастотную асимптоту с наклоном минус 20Бд/дек и высокочастотную с наклоном минус 40 дБ/дек.
Построение среднечастотной асимптоты ЖЛАЧХ начинают с выбора частоты среза. По номограмме Солодовникова определим частоту среза используя заданное время регулирования tр и значение перерегулирования
![]() ,
,
![]() .
.
Среднечастотная асимптота ЖЛАЧХ проводится через точку cр с наклоном –20 дб/дек, который обеспечивает необходимый запас по фазе. Протяженность h среднечастотной асимптоты устанавливается исходя из необходимого запаса устойчивости. Из этих же соображений выбирается ее сопряжение с низкочастотной асимптотой.
Показатель колебательности M характеризует склонность системы к колебаниям. Чем больше М, тем меньше запас устойчивости системы.
![]()
Границы среднечастотной асимптоты
![]()
![]()
Используя полученные данные строим желаемую характеристику, обеспечивающую необходимые показатели качества системы. Через частоту среза проводится среднечастотная асимптота с наклоном –20 дб/дек, высокочастотная часть системы мало влияет на устойчивость, поэтому ее достроим эквидистантно к высокочастотной части ЛАЧХ неизменяемой части системы.
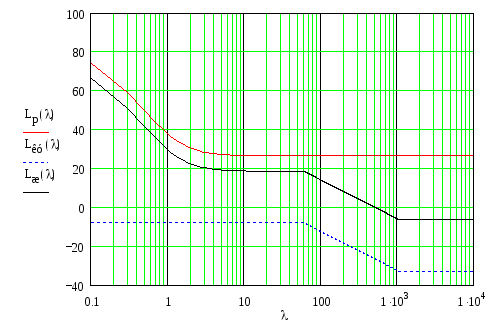
Рисунок 8 – ЛАЧХ нескорректированной системы и желаемая ЛАЧХ.
Определим запасы устойчивости скорректированной системы

Рисунок 9 –ЖЛФЧХ.
Запасы устойчивости: по амплитуде = 48 дБ, по фазе около 180.
Как видим запасы устойчивости удовлетворяют ТЗ.
Переходный процесс замкнутой скорректированной системы показан на рисунке 10.

Рисунок 10 – Переходный процесс замкнутой скорректированной системы.
Время регулирования 0,8 c.
Перерегулирование 19%.
Коррекция проведена успешно, система удовлетворяет техническому заданию.