

ВВЕДЕНИЕ
Современная промышленность характеризуется непрерывным повышением производительности машин и агрегатов, повышением качества выпускаемой продукции и снижением ее стоимости. Большие скорости протекания производственных процессов и повышение требований к точности их выдержки привели к широкому применению систем автоматического регулирования. Система автоматического регулирования должна обеспечивать поддержание на определенном уровне или изменение по заданному закону некоторых переменных характеристик (регулируемых величин) в машинах и агрегатах с помощью различного рода технических средств без участия человека.
Необходимо также добавить, что проведение некоторых технологических процессов возможно только при условии их полной автоматизации, так как малейшее замешательство человека и несвоевременное его воздействие на процесс могут привести к серьёзным последствиям.
Внедрение автоматизации способствует безаварийной работе оборудования, значительно снижает случаи травматизма, предупреждает загрязнение окружающей среды.
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1.1 Цель курсового проекта
Целью данной курсового проекта является разработка САУ гидравлическим прессом. Данная система должна обеспечивать стабильность давления в нагнетающем трубопроводе вне зависимости от потребителей. Так же система должна отвечать параметрам, заданным в техническом задании.
1.2 Технические характеристики системы управления
Тип системы цифровая;
рабочий диапазон температур,С +10 … +50;
питание: переменный ток, напряжение, В 110; потребляемая мощность, Вт 350;
точность, % 2;
быстродействие, с ≤0,5;
ускорение в нагрузке, рад/с2 0,01;
скорость в нагрузке, рад/с 0,5;
показатель колебательности ≤1,01
1.3 Функциональная схема системы управления прессом
Работа САУ гидравлическим прессом основана на изменении проходного сечения пропорционального электромагнитного клапана регулировки давления в нагнетающем трубопроводе.
Микропроцессорный комплект служит для управления величиной давления в нагнетающем трубопроводе, включает в себя ЦАП, АЦП, АЛУ, задатчик и имеет на выходе сигнал электрической природы.
Электромагнитный клапан имеет на входе сигнал электрической природы, а на выходе сигнал механической природы (перемещение штока).
Датчик давления служит для определения величины давления в нагнетающем трубопроводе.
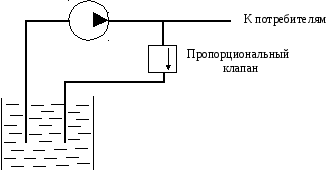
Рисунок 1 – Принципиальная схема управления давлением

U1 U2 S P
U3 P
Рисунок 2 – Функциональная схема САУ давлением: МП – микропроцессорный комплект; У – усилитель; ИМ – исполнительный механизм (электромагнитный клапан); ОУ – объект управления (нагнетающий трубопровод); Д – датчик давления; U1 – напряжение управления с выхода микроконтроллера, В; U2 – напряжение управления после усиления, В; U3 – напряжение с датчика давления, В; S – походное сечение электромагнитного клапана, м2; P – давление в нагнетающем трубопроводе, МПа.
2 ПОДБОР ЭЛЕМЕНТОВ И РАСЧЕТ ИХ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
2.1 Выбор датчика давления
По конструктивным и экономическим соображениям выбираем в качестве датчика преобразователь измерительный САПФИР – 22М – ДИ – 2180 – 01 – УХЛ3.1 – 0,25/160МПа – 42.
Данный преобразователь предназначен для работы в системах автоматического контроля, регулирования и управления технологическими процессами и обеспечивает непрерывное преобразование значения избыточного давления в унифицированный токовый выходной сигнал дистанционной передачи.

Рисунок 3 – Преобразователь САПФИР – 22М – ДИ
Данный датчик состоит из мембранного тензопреобразователя 3 размещенного внутри основания 9. Внутренняя полость 4 тензопреобразователя заполнена кремнийорганической жидкостью и отделена от измеряемой среды металлической гофрированной мембраной 6, приваренной по наружному контуру к основанию 9. Полость 10 сообщена с окружающей атмосферой. Измеряемое давление подается в камеру 7 фланца 5, который уплотнен прокладкой 8. Измеряемое давление воздействует на мембрану 6 и через жидкость воздействует на мембрану тензопреобразователя, вызывая ее прогиб и изменение сопротивления тензорезисторов. Электри-
ческий сигнал от тензопреобразователя передается из измерительного блока в электронный преобразователь 1.
Технические данные преобразователя:
модель 2180;
верхний предел измерений, МПа 160;
выходной сигнал, mA 4 – 20;
предел допустимой погрешности, % 0,25;
питание постоянный ток;
напряжение питания, В 360,72;
материал мембраны Сплав 36НХТЮ;
масса преобразователя, кг 3,0;
степень защиты от воды и пыли IP54;
климатическое исполнение УХЛ3.1.
Датчик состоит из двух элементов: мембраны и пьезоэлемента.
Передаточная функция датчика рассчитывается по формуле:
![]() (1)
(1)
Коэффициент передачи САПФИР-22М-ДИ определим по статической характеристике:
![]() (2)
(2)
где I – max выходной токовый сигнал;
P – max давление.
Постоянная времени будет определяться как постоянная времени мембраны по формуле:
![]() (3)
(3)
где
![]() –
коэффициент вязкого трения;
–
коэффициент вязкого трения;
с – жесткость мембраны.
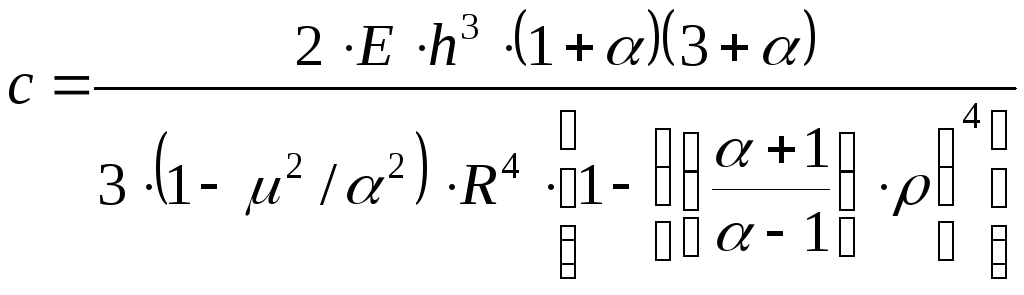 (4)
(4)
где R=30 – рабочий радиус мембраны, мм;
h=0.35 – толщина мембраны, мм;
Е=2,11011 – модуль упругости материала, Па;
=0,2 – относительный радиус жесткого центра, мм;
=3,64.
Подставив значения в формулу (4) получим:
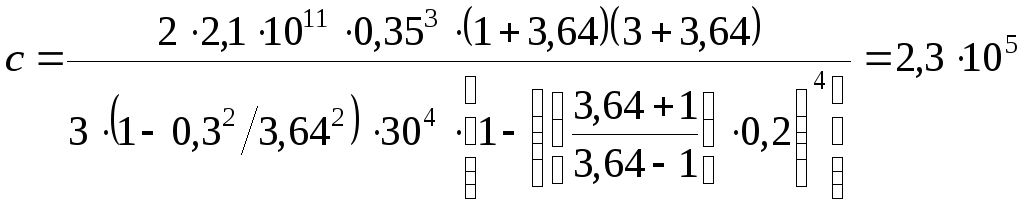 (5)
(5)
Тогда постоянная времени:
![]() (6)
(6)
Передаточная функция преобразователя будет:
![]() (7)
(7)