

2.5 Передаточная функция объекта управления
Объектом управления является нагнетающий трубопровод. Так как длина нагнетающего трубопровода мала, то емкостью трубопровода можно пренебречь. Тогда передаточная функция объекта управления примет вид:
![]() (19)
(19)
где TL – постоянная времени;
k – коэффициент передачи.
![]() (20)
(20)
Для трубопровода круглого сечения
![]() (21)
(21)
где - кинематический коэффициент вязкости рабочей жидкости.
Рабочая жидкость – вода ГОСТ20799-88: =3210-5 м2/с при 40С; =890 кг/м3 при 20С.
![]() (22)
(22)
![]() (23)
(23)
Передаточная функция объекта управления:
![]() (24)
(24)
3. РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ
3.1 Исследование линейной части системы

Рисунок 4 – Структурная схема системы управления давлением
![]()
![]()
![]()
![]()
![]()
Передаточная функция замкнутой системы:
![]() (25)
(25)
![]() (26)
(26)
Передаточная функция разомкнутой системы:
![]() (27)
(27)
![]() (28)
(28)
Определим устойчивость системы регулирования по критерию Гурвица. Для устойчивости системы необходимо и достаточно, чтобы все миноры определителя Гурвица были положительны. Определитель Гурвица составим по коэффициентам характеристического уравнения.
![]() (29)
(29)
 (30)
(30)
![]() (31)
(31)
![]() (32)
(32)
 (33)
(33)
 (34)
(34)
Все миноры определителя Гурвица положительны, следовательно, система устойчива.
Произведем обратное преобразование Лапласа и получим переходную функцию системы, построим график переходного процесса:
![]()

![]()
![]()
![]()
(35)

Рисунок 5 – График переходного процесса
Определим графически прямые оценки качества системы.
Время переходного процесса tП – это время регулирования системы. Определяется как интервал от момента приложения какого-либо воздействия на систему до времени вхождения системы 5 % трубу. Определяет быстродействие системы.
tП = 0,27 с.
Перерегулирование δ (максимальная динамическая ошибка):
= 0 %
Колебательность n – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние: n = 0
Заменим в передаточной функции замкнутой системы оператор р на jw
 (36)
(36)
 (37)
(37)
![]() (38)
(38)

Рисунок 6 – АЧХ системы
Определим косвенные оценки качества системы.
Показатель колебательности:
![]() (39)
(39)
Резонансная
частота ωp
– частота, при которой АЧХ достигает
максимальное значение: ![]() рад/с
рад/с
С учетом прямых и косвенных оценок качества можно сделать вывод, что качество управления достаточно высокое.
3.2 Проведение z-преобразования
Проведение z-преобразования осуществляется с помощью программы Matlab. Учитывая, что время дискретизации системы T0=0,05с, получим передаточную функцию для дискретной системы:
 (40)
(40)
Текст рабочей программы для получения передаточной функции дискретной системы:
>> Wpzam=Tf([1.71*10^-5 3.98*10^-4],[6.55*10^-8 2.73*10^-5 3.63*10^-3 0.114 1])
Transfer function:
1.71e-005 s + 0.000398
---------------------------------------------------------
6.55e-008 s^4 + 2.73e-005 s^3 + 0.00363 s^2 + 0.114 s + 1
>> Wzzam=c2d(Wpzam,0.05)
Transfer function:
0.0001917 z^3 - 2.973e-005 z^2 - 9.411e-006 z - 5.648e-010
----------------------------------------------------------
z^4 - 0.7525 z^3 + 0.1357 z^2 + 2.152e-005 z + 8.901e-010
Sampling time: 0.05
> >
Step (Wpzam, Wzzam)
>
Step (Wpzam, Wzzam)
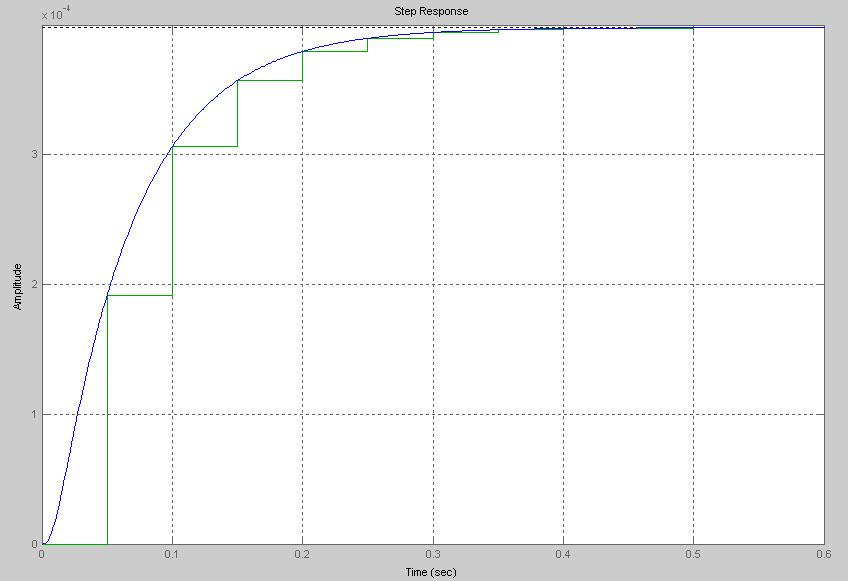
Рисунок 7 – График непрерывного и дискретного переходных процессов
По графику видно, что дискретная система переходит в установившееся состояние за 0,35 с, что вполне удовлетворяет требованиям по быстродействию.
3.3 Определение устойчивости дискретной системы по расположению кор-
ней характеристического уравнения
Передаточная функция замкнутой дискретной системы имеет вид:
![]() (41)
(41)
Характеристическое уравнение имеет вид:
![]() (42)
(42)
Для устойчивости системы необходимо чтобы корни характеристического уравнения (42) лежали внутри окружности с единичным радиусом с центром в точке (0;j0).
Получим корни характеристического уравнения:
![]()
![]()
![]()
![]()
Условие выполнено, система устойчива.
4 ПОСТРОЕНИЕ ЛАЧХ, ЛФЧХ СИСТЕМЫ И ИХ АНАЛИЗ
4.1 Z-преобразование разомкнутой системы
Передаточная функция разомкнутой системы:
![]() (43)
(43)
Переход к дискретной передаточной функции осуществляется с помощью программы Matlab, по уравнению (44), учитывая время дискретизации системы Т=0,05 с.
 (44)
(44)
Текст рабочей программы:
>> Wpraz=Tf([4.98*10^-8],[6.59*10^-8 2.73*10^-5 3.63*10^-3 0.113 1])
Transfer function:
4.98e-008
---------------------------------------------------------
6.59e-008 s^4 + 2.73e-005 s^3 + 0.00363 s^2 + 0.113 s + 1
>> Wzraz=c2d(Wpraz,0.05)
Transfer function:
9.379e-009 z^3 + 9.593e-009 z^2 + 2.116e-010 z + 1.435e-014
-----------------------------------------------------------
z^4 - 0.7544 z^3 + 0.1396 z^2 + 2.251e-005 z + 1.01e-009
Sampling time: 0.05
>>
Передаточная функция разомкнутой дискретной системы:
![]() (45)
(45)
4.2 Переход к псевдочастоте, построение ЛАЧХ, ЛФЧХ
Для построения ЛАЧХ необходимо перейти к псевдочастоте, производя ряд
замен.
Производим
замену в выражении (37)
![]() (46)
(46)
 (47)
(47)
Произведем
замену в выражении (47) на
![]() (48)
(48)
где T0=0,05c – период дискретизации системы.
Данная частота дискретизации выбрана исходя из требований точности регулирования.
 (49)
(49)
![]() (50)
(50)

(51)
![]()
Построение ЛАЧХ:
![]() (52)
(52)

Рисунок 8 – ЛАЧХ дискретной системы, построенная в программе
МАTHCAD
Построение ЛФЧХ:
 (53)
(53)

Рисунок 9 – ЛФЧХ дискретной системы, построенная в программе
МАTHCAD
Как видно запасы устойчивости системы составляют:
-запас устойчивости по амплитуде Gm=159 дБ;
-запас устойчивости по фазе бесконечен.
Это значит, что система находится в устойчивом состоянии и удовлетворяет требованиям по надежности и быстродействию. Можно придти к выводу, что у данной системы нет необходимости в коррекции.