

7.1 Расчет аналогового корректирующего устройства
Для коррекции в системе применяется аналоговое корректирующее устройство (КУ) последовательного типа. Корректирующее устройство можно включить между различными элементами исходной системы. При выборе места включения руководствуются значением вносимой устройством погрешности. Наиболее предпочтительным вариантом является установка корректирующего устройства в электрическую цепь после микропроцессора.
Разобьем исходную ЛАЧХ корректирующего устройства на два участка. Запишем выражение для двух участков:
Первый участок изображен на рисунке 12.

Рисунок
12 – Первый участок корректирующего
устройства


Второй участок изображен на рисунке 13.
Передаточная функция второго участка имеет вид:

где


Рисунок 13 – Второй участок корректирующего устройства
Из графика ЛАЧХ КУ (Приложение 1) находятся значения постоянных времени, соответствующие им частоты определяются по местам излома ЛАЧХ.
Рассчитаем передаточную функцию первого участка корректирующего устройства, нам известно, что Т1=12.5 с, а Т2=0.33, следовательно зададимся следующими значениями для R1=6 МОм, R2=10 МОм, R3= 4.8 МОм, R4=0.33 МОм, C1= , C2=10 мкФ.
Тогда имеем следующее значение выражения:

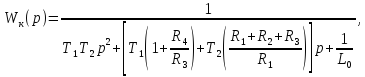
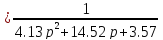
Передаточная функция первого участка корректирующего устройства имеет следующий вид:

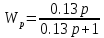
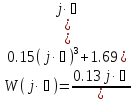
Рассчитаем передаточную функцию второго участка корректирующего устройства, значения постоянных времени находятся согласно рисунку 11 – ЛАЧХ КУ, то есть Т=0.13 с, значение емкости конденсатора примем равным 10 мкФ, получим:
Общая передаточная функция корректирующего устройства и электрическая схема, изображенная на рисунке 14, состоит из двух последовательных звеньев.
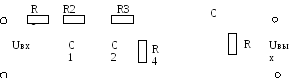
Рисунок 14 – Общая электрическая схема корректирующего устройства системы автоматического управления паротурбинным генератором
Схема включения КУ в систему управления представлена на рисунке 15.

МП – микропроцессор; КУ – корректирующее устройство; САУ – система автоматического управления; ДОС – датчик обратной связи
Рисунок 15 – Включение корректирующего устройства в систему автоматического управления
Общая передаточная функция корректирующего устройства имеет вид:


7.2 Расчет дискретного корректирующего устройства
Одним из методов коррекции стало применение программных корректирующих устройств на МП, применение которых позволяет варьировать параметры в широких пределах и быстро их изменять без изменения технического исполнения системы.
Дискретная коррекция заключается в составлении программы коррекции на том языке, на котором работает микропроцессор.
Для того чтобы составить программу коррекции необходимо получить характеристическое уравнение в реальном масштабе времени.
Произведем
замены и выполним z –
преобразование, согласно принятым
допущениям
 ,
,
 .
.
Введем
замену:

И проведем z – преобразование и получим передаточную функцию корректирующего устройства, которая примет вид:

Представим разностное уравнение в реальном масштабе времени:

Программа коррекции для микропроцессора, написанная на языке Assembler по составленному разностному уравнению в реальном масштабе времени:
i_port EQU 11h; номер порта для чтения
o_port EQU 12h; номер порта для записи
;Запишем данные в ячейки памяти начиная с адреса 0000.
DB 0; выделение памяти под переменные xk+1, x, xk-1.
DB 1; выделение памяти под переменные y, yk-1.
;вычисляем значение выражения;
у(k)= B2·y1+B1·y+ A3 ·x2+ A2·x1+ A1·x
start: ;метка начала цикла коррекции
in al,i_port; чтение данных из порта (x)
mov x,al
mul
al,A1; вычисление слагаемого А1 х
х
mov bl,al; сохранение результата в bl
;
в результате имеем А1 х
в регистре bl
х
в регистре bl
mov al,х1;
mul
al,A2; слагаемое А2 х1
х1
add bl,al; прибавление к предыдущему результату
;в
результате имеем А1 х+А2
х+А2 х1
в регистре bl
х1
в регистре bl
mov al,х2;
mul
al,A3; слагаемое А3 х2
х2
в
результате имеем А3 х2
в регистре al
х2
в регистре al
add bl,al; прибавление к предыдущему результату
;в
результате имеем А1 х+А2
х+А2 х1+A3
х1+A3 x2
в регистре bl
x2
в регистре bl
;Повторение аналогичных действий для всех переменных.
; в регистре b1 имеем результат вычисления всего выражения
mov y1,y
mov y,bl
mov x2,x1
mov x1,x
mov x,bl
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
Блок - схема программы коррекции представлена на рисунке 16.
В качестве корректирующего устройства для система автоматического управления паротурбинным генератором выбираем дискретное корректирующее устройство, так как нецелесообразно после микропроцессора в систему ставить корректирующее устройство, таким методом мы усложняем систему. А дискретное корректирующее устройство программно корректируем рассматриваемую проектируемую систему.
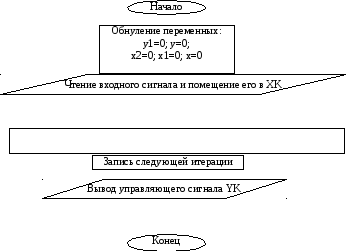
Рисунок 16 – Блок – схема программы коррекции
ЗАКЛЮЧЕНИЕ
При выполнении курсовой работы была рассмотрена система автоматического управления паротурбинным генератором на БалАЭС. Были определены назначение, состав и основные требования к системе, подобрана элементная база.
Затем был произведен расчет датчика обратной связи, из которого следует, что датчик соответствует предъявляемым требованиям.
В ходе анализа системы был построен переходный процесс и амплитудо-частотные характеристики системы, определены прямые и косвенные показатели качества, а также определение устойчивости системы. Устойчивость определяли по критерию Михайлова, согласно которому система получилась на границе устойчивости, так же мы можем сказать и по виду переходного процесса, что система находится на границе устойчивости. При построении ЛАЧХ было замечено, что система нуждается в коррекции.
При проведении коррекции была построении ЖЛАЧХ и определены параметры аналогового последовательного корректирующего устройства. Также был предложен вариант дискретной коррекции в виде программы к микропроцессору. Данный вариант не предусматривает технического изменения системы и коррекция будет более быстродействующая, хотя и с меньшим качеством из-за накапливания ошибки коррекции из-за итерационного метода.
Для данного случае, предпочтительнее дискретное устройство, поскольку для системы важна высокая точность из-за работы на высоких частотах.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
-
Агейкин Д.И.Датчики контроля и регулирования: Справочник / Д. И. Агейкин, Е. Н. Костина, Н. Н. Кузнецова. – М.: Машиностроение, 1965. – 98 с.
-
Бесекерский В. А., Попов Е. П., Теория систем автоматического регулирования / В. А. Бесекерский - М.: Наука, 1996. – 992 с.
-
Бобриков С. А., Тихончук С. Т., Кузнецов А. А., Проектирование цифровой следящей системы / С. А. Бобриков - Одесса: ОПУ, 1999. - 21 с.
-
Солодовников В. В., Плотников А. В., Основы теории и элементы САР / В. В. Солодовников - М: Машиностроение, 1985.
-
Топчеев Ю. И., Учебное пособие для вузов. Атлас для проектирования систем автоматического регулирования / Ю. И. Топчеев - М.: Машиностроение, 1989. - 752 с.
-
Тюкин В. Н., Теория управления: Конспект лекций. Часть 1. Обыкновенные линейные системы управления / В. Н. Тюкин - Вологда: ВоГТУ, 2000. - 200 с.: ил.
-
Шаталов А. С., Теория автоматического управления. Учебное пособие для вузов / А. С Шаталов - М.: Высшая школа, 1977.
8. Юревич Е.И., Теория автоматического управления / Е. И. Юревич - М.: Энергия, 1969. – 640с.
9. Datasheet for AClassic 32 [Электронный ресурс] : [справочный листок]. – Atmel Corporation, 2003. – Режим доступа: http://www.atmel.com/literature
10. Datasheet for MOC3020 [Электронный ресурс] : [справочный листок]. – Fairchild Semiconductor Corporation, 2005. – Режим доступа: http://www.datasheets.com/semiconductors
11. Учебно – методический материал: Пособие для обучаемых «Паровая турбина», «Турбопитательный насосный агрегат», «Система цифрового автоматического регулирования питания парогенераторв», 2002г.
ПРИЛОЖЕНИЕ А
(обязательное)
Графическая часть
1 Логарифмические характеристики САУ паротурбинным генератором 51
№ документа
Шалкинская
Бойко
Скоробогатова