

Обоснование выбора электродвигателя
В качестве приводного двигателя вентилятора используем двигатель ВАСО 2-37-14. Электродвигатели асинхронные с короткозамкнутым ротором взрывозащищенные вертикальные ВАСО предназначены для безредукторного привода аппаратов воздушного охлаждения. Двигатели имеют следующую структуру обозначения:
-
ВАСО - взрывозащищенный асинхронный специальный обдуваемый;
-
2, 4 - номер серии;
-
22, 30, 37, 55, 75, 90-мощность двигателя, кВт;
-
14; 24; 32-число полюсов.
Двигатели отличает высокая надежность, простота и удобство в обслуживании и эксплуатации, длительный срок службы. По установочно-присоединительным размерам электродвигатели серии ВАСО2 взаимозаменяемы с электродвигателями серии ВАСО и ВАСО4.
Описание и работа электропривода
Описание упрощенной принципиальной схемы модернизируемого электропривода представлено на рис.4.1.:
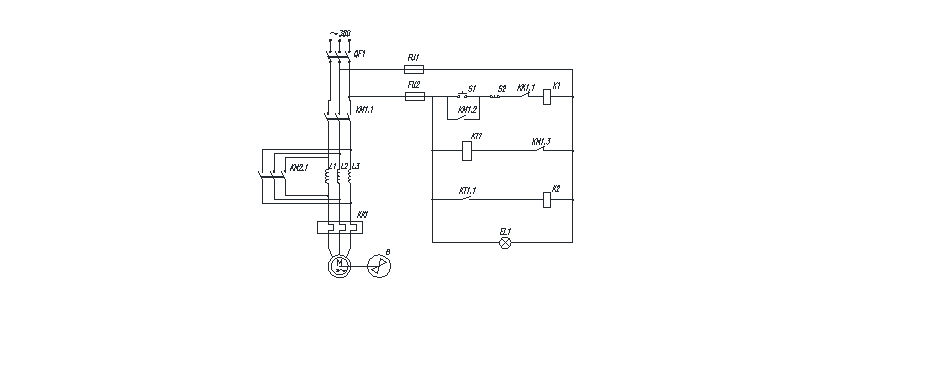
Рис. 4.1. «Упрощенная принципиальная схема модернизируемого электропривода»
Перед пуском систему подготавливают к работе: включают автоматический выключатель QF1. При этом запитывается система управления и загорается контрольная лампа EL1 «сеть включена» на переносном технологическом пульте управления.
Для осуществления пуска асинхронного электродвигателя вентилятора требуется замкнуть цепь питания катушки контактора K1 ключом S1 (кнопка «пуск»). Данный контактор выполняет 3 функции: шунтирует кнопку «пуск» контактом KM1.2 и тем самым ставит ее на самоблокировку; подает напряжение в цепь питания электродвигателя, замыкая контакты KM1.1; разрывает цепь питания реле времени KT1 размыкая нормальнозамкнутый контакт КМ1.3. Как только контактор К1 обесточит цепь питания реле времени KT1 оно начнет отсчитывать заданную выдержку времени. После окончания отсчета выдержки времени реле КТ1 своим контактом КТ1.1 замкнет цепь питания катушки контактора К2.
Контактор К2 замкнет свои контакты КМ2.1 и тем самым шунтирует пусковые реакторы. С этого момента электродвигатель начнет работать напрямую от сети.
Для остановки электродвигателя требуется разорвать цепь питания контактора К1 нажав кнопку «стоп» S2, и тем самым разомкнуть контакты КМ1.1.
Защита электродвигателя осуществляется следующим образом: в цепь питания контактора К1 последовательно включен нормальнозамкнутый контакт теплового реле КК1. В случае его срабатывания цепь питания контактора К1 будет разорвана и двигатель остановлен.
Математическая модель и система уравнений электропривода аво
-
Уравнения двигателя во вращающейся с произвольной скоростью системе координат
Для
разработки алгоритмов управления
короткозамкнутым асинхронным двигателем
используются уравнения равновесия ЭДС
в различных системах координатах.
Параметры двигателя соответствуют Т-
образной схеме замещения, потери в стали
не учитываются. В общем виде, уравнения
двигателя во вращающейся с произвольной
скоростью
![]() системе координат имеют вид:
системе координат имеют вид:

Уравнение электромагнитного момента:
![]() ,
где m-число фаз, p-число пар полюсов.
,
где m-число фаз, p-число пар полюсов.
Уравнения связи:
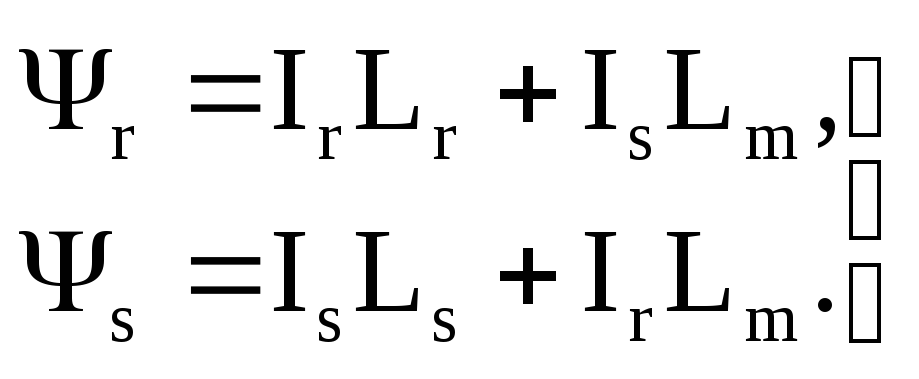
Пользуясь уравнениями связи и учитывая, что вектор, к которому привязана система вращающихся координат, представлен только своим модулем, можно предложить различные виды уравнений двигателя.
-
Скалярное частотное управление асинхронным двигателем
Простое частотное управление асинхронным двигателем для своей реализации не требует определения внутренних параметров машины. Все необходимые параметры, вводимые в привод, указаны в общих паспортных данных двигателя. Различные законы частотного управления опираются на уравнения установившихся режимов. Следовательно, привод имеет невысокие динамические показатели. При частотном управлении в приводе, как правило, предусмотрен один внутренний настраиваемый регулятор скорости. Большинство фирм выпускают такие простые приводы. Приводы с частотным управлением обычно имеют встроенные функции: переключаемые законы управления, задатчик интенсивности, ограничение тока, вычисление температуры двигателя (по значению измеренного тока и частоты), исключение из рабочих режимов резонансных и ряда других частот.
В серийно выпускаемых приводах применяются следующие законы частотного управления:
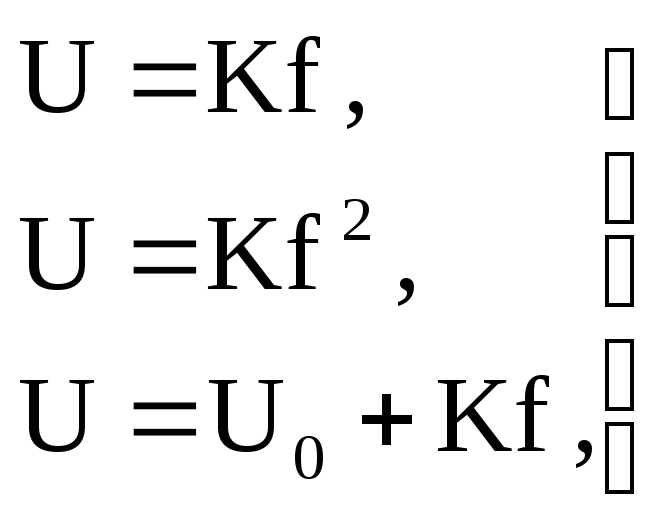
где K – коэффициент, f– относительное значение частоты, U0 – напряжение IR–компенсации.
IR–компенсация позволяет получить дополнительное увеличение момента на низких скоростях, при этом не требуется измерять активное сопротивление статора. Обычно применяют увеличение напряжения на заданное значение при нулевом значении частоты, что поясняется рис.3.
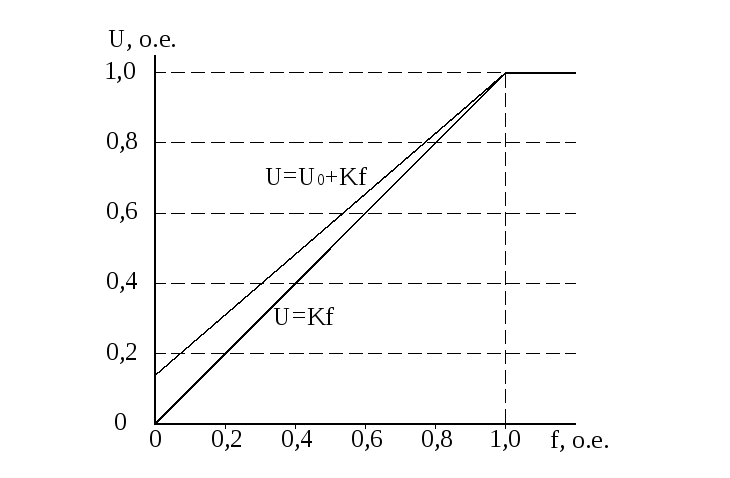
Рис. 1. Изменение напряжения двигателя при простом частотном управлении и при использовании IR-компенсации
Приводы с простым частотным управлением обладают невысоким быстродействием, в переходных режимах имеют колебания момента. Частотное управление применяется в простых и недорогих приводах, преимущественно в приводах с «вентиляторной» нагрузкой.
Схема модели электропривода в среде MatLab-Simulink
М
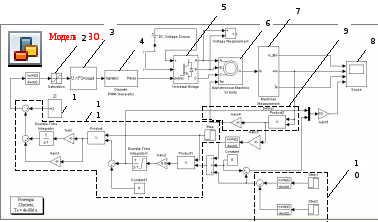 одель
САУ АВО с асинхронным двигателем
представлена на рис.2.
одель
САУ АВО с асинхронным двигателем
представлена на рис.2.
Рис. 2. Структурная схема системы автоматического управления АВО
Модель состоит из следующих элементов:
-
Задатчик интенсивности
-
Блок ограничения
-
Генератор импульсов
-
Дискретный ШИМ генератор
-
ШИМ инвертор
-
Блок асинхронного двигателя
-
Блока измерения параметров двигателя
-
Осциллограф
-
Вентиляторная нагрузка
-
Возмущающее воздействие
-
Система автоматического управления
-
Задатчик интенсивности
Структурная схема задатчика интенсивности представлена на рис.3. Задатчик интенсивности предназначен для задания сигнала по скорости с заданной интенсивностью нарастания разгона и торможения (плавного изменения величины сигнала задания)

Рис. 3. Структурная схема задатчика интенсивности
-
Блок ограничения
Блок ограничения представлен на рис.4. Он налагает верхние и нижние границы на сигнал. Когда сигнал выходит за пределы диапазона, указанного в блоке, то он подрезается по этим границам. Если сигнал находится в этих пределах, то он пропускается дальше.

Рис. 4. Блок ограничения
-
Генератор импульсов
Генератор импульсов представлен на рис.5. Генератор служит для вырабатывания импульсов управления ШИМ генератором путем сравнения сигналов задания с пилообразным напряжением внутри генератора, частота которого равна 2 кГц.
Рис. 5. Генератор импульсов
-
Дискретный ШИМ генератор
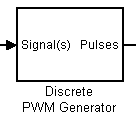
Рис. 6. Дискретный ШИМ генератор
Служит для создания импульсов управления ШИМ инвертором.
-
Источник постоянного напряжения
Этот блок представлен на рис.7. и осуществляет функции идеального источника напряжения постоянного тока. Положительный полюс помечен знаком плюс. Можно изменять напряжение в любое время в течение моделирования. Подает напряжение на ШИМ инвертор, через который питает двигатель.
![]()
Рис. 7. Источник постоянного напряжения
-
ШИМ инвертор
ШИМ – широтно-импульсная модуляция. Блок представлен на рис.8.
Используется в большинстве преобразователей. Инверторы с ШИМ используются во всех перспективных преобразователях частоты, применяемых в приводах с глубоким регулированием скорости. Отличительной особенностью этих инверторов является не только возможность регулирования в них как напряжения, так и частоты от нуля до номинального значения, но и получение формы выходного тока, близкой к синусоидальной. Это позволяет в таких системах обеспечить весьма широкий диапазон регулирования угловой скорости асинхронного двигателя и уменьшить потери в нем от высших гармоник напряжений. При использовании инверторов с ШИМ отпадает необходимость в источнике регулируемого выпрямленного напряжения, что упрощает силовую схему и позволяет получить коэффициент мощности преобразователя, близкий к единице.

Рис. 8. ШИМ инвертор
-
Блок асинхронного двигателя
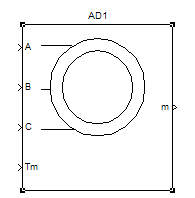
Рис. 9. Блок асинхронного двигателя
На рис.9. изображен блок асинхронной машины, который работает или в генераторном или в двигательном режиме. Режим работы описывается знаком механического момента (положительный для двигателя, отрицательный для генератора). Электрическая часть машины представлена моделью четвертого порядка и механической частью системой второго порядка. Все электрические переменные и параметры относятся к статору.
-
Блок измерения параметров двигателя
Измеряет токи статора, скорость ротора и момент на валу двигателя.

Рис. 10. Блок измерения