

6.2 Построение рабочей точки и запретной зоны
По
техническому заданию, требуемая скорость
в нагрузке составляет ωтр=0,5
рад/с, требуемое ускорение в нагрузке
εтр=0,01
рад/с2,
максимальная амплитуда ошибки
![]() .
.
Найдем коэффициенты ошибки по скорости и ускорению:
![]() (44)
(44)
![]() (45)
(45)
Откладываем
на оси частот (рисунок 13) значения kv
и
![]() .
.
Через
точку ( kv;0)
проводим асимптоту с наклоном -20 дБ/дек,
через точку (![]() ;0)
проводим асимптоту под наклоном -40
дБ/дек. Точка пересечения будет являться
рабочей точкой для системы. Рабочая
точка А и запретная зона ЗЗ лежат ниже
ЖЛАЧХ системы, следовательно, система
удовлетворяет требованиям по точности
и быстродействию.
;0)
проводим асимптоту под наклоном -40
дБ/дек. Точка пересечения будет являться
рабочей точкой для системы. Рабочая
точка А и запретная зона ЗЗ лежат ниже
ЖЛАЧХ системы, следовательно, система
удовлетворяет требованиям по точности
и быстродействию.
6.3 Построение ЛАЧХ последовательного корректирующего устройства
Построение ЛАЧХ последовательного корректирующего устройства производится путем вычитания реальной ЛАЧХ из желаемой ЛАЧХ (рисунок 13) системы:
Lку(λ)=Lж(λ)-Lр(λ) (46)
По ЛАЧХ корректирующего устройства определяются частоты сопряжения и передаточная функция корректирующего устройства.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (47)
(47)
6.4 Оценка качества системы после коррекции
Таким образом можем сказать, что запас устойчивости системы по амплитуде Ga=5дБ, запас устойчивости по фазе равен Gφ=-142-(-180)=38 град.
После коррекции система удовлетворяет требованиям по запасам устойчивости по фазе и амплитуде.

Рисунок 14 – ЛАЧХ и ЛФЧХ системы после коррекции
Следовательно, коррекция дала положительный результат.
7 РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
7.1 Расчет последовательного корректирующего устройства
Передаточная функция корректирующего устройства имеет вид:
![]()
Корректирующее устройство имеет вид RC цепочки (рисунок 14):
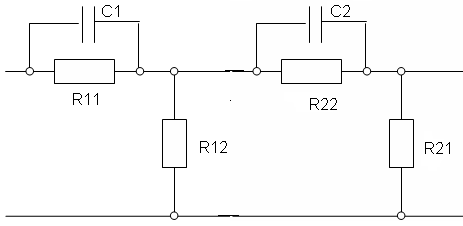
Рисунок 14 – Последовательное корректирующее устройство
Всю RC цепочку можно разбить на две части. Каждая из этих частей описывается частью передаточной функции корректирующего устройства. Расчет параметров элементов электрической цепи приведен ниже.
![]()
Зададимся значением емкости конденсаторов C1=C2=10мкФ.
![]() (48)
(48)
![]() (49)
(49)
Для второй части передаточной функции корректирующего устройства проведем аналогичные вычисления:
![]()
![]() (50)
(50)
![]() (51)
(51)
Последовательное корректирующее устройство устанавливается в системе после операционного усилителя (рисунок 15).
МП
Усилитель
Фара
Редуктор
Двигатель
Корректирующее
устройство








Датчик
углового перемещения


Рисунок 15 – Структурная схема САУ фарами автомобиля с учетом
корректирующего устройства
7.2 Дискретная коррекция
Перейдем
от псевдочастоты к частоте ω при помощи
замены
![]() в выражении (47):
в выражении (47):
![]()
 (52)
(52)
Переходим
к z
производя замену
![]() в выражении (52):
в выражении (52):
![]() (53)
(53)
Делим числитель и знаменатель выражения (53) на Z:
![]() (54)
(54)
Разностное уравнение в реальном масштабе времени:
![]() (55)
(55)
На основании уравнения (55) составляется корректирующая программа.
Корректирующая программа на основании сигнала поступающего с датчика угла отклонения фар и сигнала управления подаваемого микропроцессором вырабатывает корректирующее значение, на которое умножается сигнал управления. Корректированный сигнал подается в систему. Блок-схема программы коррекции системы автоматического управления фарами автомобиля приведена на рисунке 16.

Рисунок 16 – Блок-схема программы коррекции САУ фарами автомобиля