

3.2 Получение статических характеристик
Для режима холостого хода статическая характеристика датчика линейна, та как справедливо соотношение:
![]()
где U – напряжение питания потенциометра U=5В; R – сопротивление обмотки;
r - сопротивление части обмотки приходящейся на длину перемещения
движка потенциометра.
Учитывая, что
![]() ,
где l
– общая длина намотки, получим:
,
где l
– общая длина намотки, получим:
![]() (23)
(23)
![]() (24)
(24)
k – коэффициент преобразования потенциометра.
Для потенциометра углового перемещения при отсутствии нагрузки:
![]()
![]() -
угол поворота движка от нулевого
положения.
-
угол поворота движка от нулевого
положения.
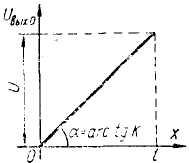 Полученные
выражения показывают, что статическая
характеристика линейных потенциометров
при отсутствии нагрузки представляют
прямую, проходящую через начало координат,
с коэффициентом наклона k
(рисунок 3).
Полученные
выражения показывают, что статическая
характеристика линейных потенциометров
при отсутствии нагрузки представляют
прямую, проходящую через начало координат,
с коэффициентом наклона k
(рисунок 3).
Рисунок 6 – Статическая характеристика потенциометрического датчика
6.3 Получение динамических характеристик датчика
При чисто активной нагрузке получим:
![]() (25)
(25)
где Rвн – сопротивление датчика; Rн – сопротивление в нагрузке; k1 – U/l;
Учитывая что, сопротивление нагрузки много больше сопротивления датчика, но не должно превышать 1000 Ом, получим передаточную функцию датчи
ка обратной связи.
![]() (26)
(26)
При чисто активной нагрузке погрешность преобразования потенциометрических датчиков не превышает 1%.
Вывод: потенциометрический датчик углового перемещения удовлетворяет требованиям системы по точности и быстродействию, имеет линейную статическую характеристику, и является безынерционным усилительным звеном.
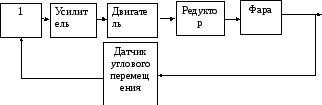
Рисунок 7 – Структурная схема САУ фарами автомобиля
4. РАСЧЕТ УСТОЙЧИВОСТИ СИСТЕМЫ
4.1 Исследование линейной части системы

Рисунок 8 – Структурная схема системы с передаточными функциями эле-
ментов
![]()
![]()
![]()
![]()
![]()
Передаточная функция прямой ветви:
![]() (27)
(27)
Передаточная функция замкнутой системы:
![]() (28)
(28)
Произведем обратное преобразование Лапласа и получим переходную функцию системы, как зависимость от времени:

![]()
![]()
(29)
Построим график переходной функции (рисунок 9) . Определим время вхождения системы в «пятипроцентную трубку» tp=0.153 c. Максимальное значение регулируемой величины hmax=44, установившееся значение регулируемой величины hуст=33.
Определим перерегулирование (30).
![]() (30)
(30)
Можно прийти к выводу, что система устойчива, удовлетворяет требования по быстродействию, но не удовлетворяет требованиям по колебательности и перерегулированию, которое для электромеханических систем составляет до 30%.
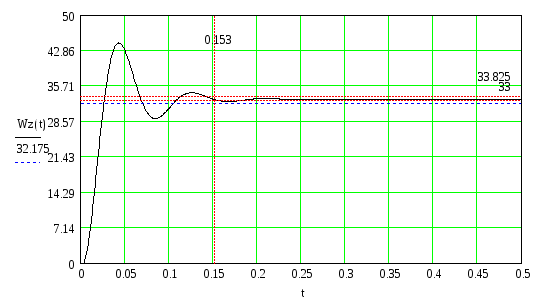
Рисунок 9 – График переходного процесса
Найдем косвенные оценки качества. Для построения АЧХ произведем замену p=jω в выражении (28) для передаточной функции замкнутой системы.
![]() (31)
(31)
Максимальное значение АЧХ (рисунок 10) Amax=54, значение АЧХ при частоте ω=0 A(0)=33.3, резонансная частота ωрез=72 Гц, частота среза ωср=433 Гц.
Косвенные показатели качества системы:
- показатель колебательности:
![]() (32)
(32)
- время переходного процесса:
![]() (33)
(33)
- полоса пропускания ограничивается частотами соответствующими зна
чению
АЧХ
![]() и составляет
и составляет
![]() .
.
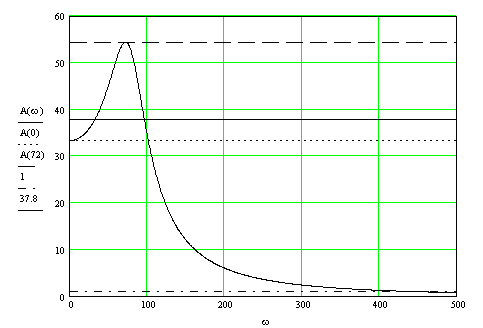
Рисунок 10 – АЧХ системы управления фарами автомобиля
По косвенным характеристикам можно определить, что система удовлетворяет требованиям по быстродействию, но не удовлетворяет требованиям по колебательности.
4.2 Проведение z-преобразования
Проведение z-преобразования осуществляется с помощью программы Matlab. Учитывая, что время дискретизации системы T0=0.02с, получим передаточную функцию для дискретной системы.
Текст рабочей программы для получения передаточной функции дискретной системы:
Wpzam=tf([33],[2.26*10^-7 1.65*10^-4 9.43*10^-3 1])
Transfer function:
33
--------------------------------------------
2.26e-007 s^3 + 0.000165 s^2 + 0.00943 s + 1
>> Wzzam=c2d(Wpzam,0.02)
23.02 z^2 + 19.88 z + 0.1768
-----------------------------------------
z^3 - 0.04875 z^2 + 0.3541 z - 4.555e-007

Рисунок 11 – График непрерывного и дискретного переходных процессов
По графику видно, что дискретная система переходит в установившееся состояние за 0,16 с, что вполне удовлетворяет требованиям по быстродействию.
4.3 Определение устойчивости дискретной системы по расположению кор-
ней характеристического уравнения
Передаточная функция дискретной системы имеет вид:
![]() (34)
(34)
Характеристическое уравнение имеет вид:
![]() (35)
(35)
Для устойчивости системы необходимо чтобы корни характеристического уравнения лежали внутри окружности с единичным радиусом с центром в точке (0;j0).
Получим корни характеристического уравнения:
![]()
![]()
![]()
Условие выполнено, система устойчива.
5 ПОСТРОЕНИЕ ЛАЧХ СИСТЕМЫ И ЕЕ АНАЛИЗ
5.1 Нахождение передаточной функции разомкнутой системы
Разрываем обратную связь.
11
1/50
1![]()
![]()
![]()









Рисунок 12 – Структурная схема разомкнутой системы
Определяем передаточную функцию разомкнутой системы:
![]() (36)
(36)
5.2 Z-преобразование разомкнутой системы
Переход к дискретной передаточной функции осуществляется с помощью программы Matlab.
Текст рабочей программы:
>> Wpraz=tf([106],[2.45*10^-5 1.75*10^-2 1 0])
Transfer function:
106
------------------------------
2.45e-005 s^3 + 0.0175 s^2 + s
> Wzraz=c2d(Wpraz,0.02)
Transfer function:
0.8 z^2 + 0.7093 z + 0.004941
---------------------------------------
z^3 - 1.286 z^2 + 0.2857 z - 6.249e-007
Дискретная передаточная функция разомкнутой системы:
![]() (37)
(37)
5.3 Переход псевдочастоте, построение ЛАЧХ
Для построения ЛАЧХ необходимо перейти к псевдочастоте, производя ряд
замен.
Производим
замену в выражении (37)
![]() :
:
 (38)
(38)
T0=0.02c –период дискретизации системы.
Данная частота дискретизации выбрана исходя из требований точности регулирования.
Производим
замену в выражении (38)
![]() :
:
![]()
Построение ЛАЧХ:
![]() (39)
(39)
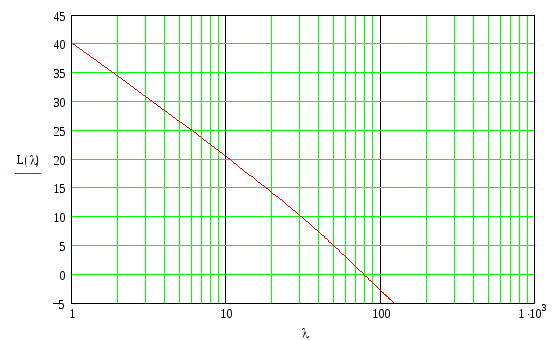
Рисунок 13 – ЛАЧХ дискретной системы, построенная в программе
МАTHCAD

Рисунок 11 – ЛАЧХ дискретной системы построенные в программе
MATLAB
Так как программный пакет MATLAB является специализированным приложением, для дальнейшей работы пользуемся логарифмическими характеристиками, полученными в этой программе.
Построим асимптотическую ЛАЧХ системы:
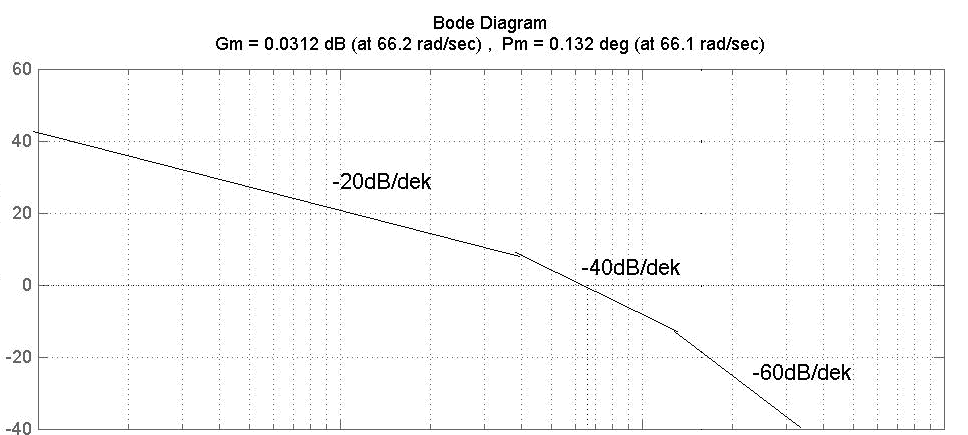
Рисунок 12 – Асимптотическая амплитудно-частотная характеристика
Как видно запасы устойчивости системы составляют:
-запас устойчивости по амплитуде Gm=0.0312 дБ;
-запас устойчивости по фазе 0,132 град;
Это значит, что система находится на границе устойчивости и не удовлетворяет требованиям по надежности.
Можно придти к выводу, что для данной системы необходима коррекция.
6 ПОСТРОЕНИЕ ЖЕЛАЕМЫХ ЛОГАРИФМИЧЕСКИХ
ХАРАКТЕРИСТИК
6.1 Построение желаемой логарифмической амплитудно-частотной
характеристики системы
Проведем построение реальных ЛАЧХ системы и желаемых ЛАЧХ системы.
Для построения реальных ЛАЧХ нанесем на логарифмическую шкалу частот частоты, соответствующие излому асимптотической ЛАЧХ.
![]()
![]()
Для того чтобы корректировать систему по заданной колебательность М необходимо, что бы ЛАЧХ системы имела наклон -20 дБ/Дек в интервале амплитуд, который задается следующими выражениями:
![]() (40)
(40)
![]() (41)
(41)
При заданной колебательности М=1,2, выражения примут вид:
![]()
![]()
Частоту
среза можем найти по номограммам
Солодовникова. Исходными данными будут
является перерегулирование
![]() ,
и время регулирования tp.
,
и время регулирования tp.
В данной системе требования предъявляемее к показателям качества системы высокие, так как на ночной дороге освещение играет жизненно важную роль. Фары должны позиционироваться быстро и без заметных колебаний.
По
техническому заданию tp=0.2,
Для электромеханических систем желаемое
перерегулирование составляет
![]() .
.
По номограммам Солодовникова определяем:
![]() (42)
(42)
![]() (43)
(43)
Внутри интервала амплитуд ограниченного прямыми L1, L2 проводится асимптота -20дБ/дек через частоту среза. В низкочастотном участке ЖЛАЧХ соединяется с реальной ЛАЧХ асимптотой -40дБ/дек, в высокочастотном участке ЖЛАЧХ проводится также, как и реальная ЛАЧХ.
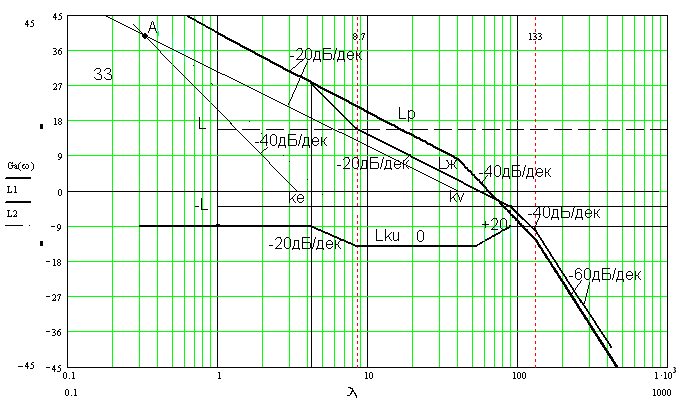
Рисунок 13 – Построение желаемых ЛАЧХ системы и корректирующего
устройства
Lp - реальная ЛАЧХ системы; Lж – желаемая ЛАЧХ системы; Lкu – ЛАЧХ корректирующего устройства.