

4 Проверка на устойчивость, переходный процесс cау
Кухонного комбайна
После расчета передаточной функции каждого элемента найдем общую передаточную функцию всей системы.
Н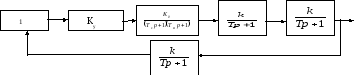 а
рисунке 6 изображена структурная схема
системы управления кухонным комбайном
а
рисунке 6 изображена структурная схема
системы управления кухонным комбайном
Рисунок 6 – Структурная схема САУ кухонным комбайном
Найдем передаточную функцию непрерывной части. К непрерывной части относятся все элементы системы кроме микропроцессора.
Передаточная функция разомкнутой системы:
![]() (36)
(36)
![]() =
=![]() (37)
(37)
![]() (38)
(38)

Проверим на устойчивость. Проверку будем производить по критерию Гурвица. Для этого выпишем из передаточной функции системы характеристическое уравнение.
![]() (39)
(39)
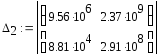
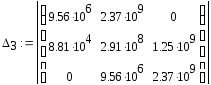
Вычислим определители Гурвица
![]()
![]()
![]()
Как видно из расчетов непрерывная система устойчива, так как определители Гурвица положительны.
Проведем проверку устойчивости по критерию Найквиста. Критерий позволяет судить об устойчивости замкнутой системы по АФЧХ разомкнутой. Если кривая АФЧХ огибает точку с координатами (-1, j0) то система неустойчива.
Построим АФЧХ разомкнутой системы.
Произведем замену p ® jw в передаточной функции разомкнутой
системы.
![]() (40)
(40)
Выделяя действительную и мнимую части, получим зависимость для построения АФЧХ
![]()
![]()
График АФЧХ приведен на рисунке 7
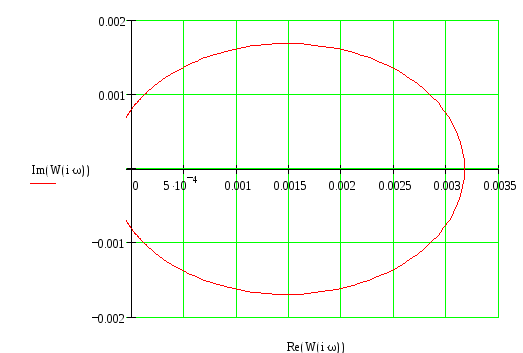
Рисунок 7 – АФЧХ
Как видно из графика кривая АФЧХ не огибает точку с координатами (-1, j0), следовательно, система устойчива.
Построим переходный процесс в системе с учетом микропроцессора
![]()
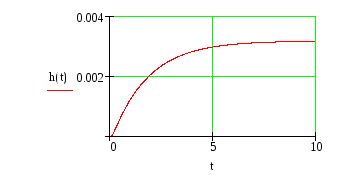
Рисунок 8 – Переходный процесс в дискретной системе
Определим качество управления по графику переходного процесса:
Время регулирования:
![]()
Перерегулирование:
![]() =0% (41)
=0% (41)
Таким образом, получили переходный процесс длительностью 10 с, что удовлетворяет условию технического задания.
5 ПОСТРОЕНИЕ ЛАЧХ И ЛФЧХ
5.1 Построение ЛАЧХ
Построение ЛАЧХ системы проводится асимптотическим методом. Асимптота – прямая линия с соответствующим наклоном. Длина асимптот ограничивается значениями частот сопряжения, которые определяются соответствующими звеньями.
Для построения ЛАЧХ воспользуемся передаточной функцией разомкнутой системы в форме Z-преобразования в зависимости от псевдочастоты .
![]() (42)
(42)
Из передаточной функции видно, что система состоит из трех звеньев: интегрирующего, апериодического и форсирующего 2-го порядка.
Для построения ЛАЧХ найдем частоты сопряжения:
K = 5,512 – коэффициент передачи системы
![]() - интегрирующее
звено (наклон –20дБ/дек)
- интегрирующее
звено (наклон –20дБ/дек)
![]() - апериодическое
звено (наклон –20дБ/дек) (43)
- апериодическое
звено (наклон –20дБ/дек) (43)
Определим корни квадратного уравнения
![]() (44)
(44)
![]() (45)
(45)
![]() - форсирующее звено
второго порядка (наклон +40дБ/дек)
- форсирующее звено
второго порядка (наклон +40дБ/дек)
По полученным данным построим ЛАЧХ системы автоматического управления кухонным комбайном.
График ЛАЧХ приведен на рисунке 9.
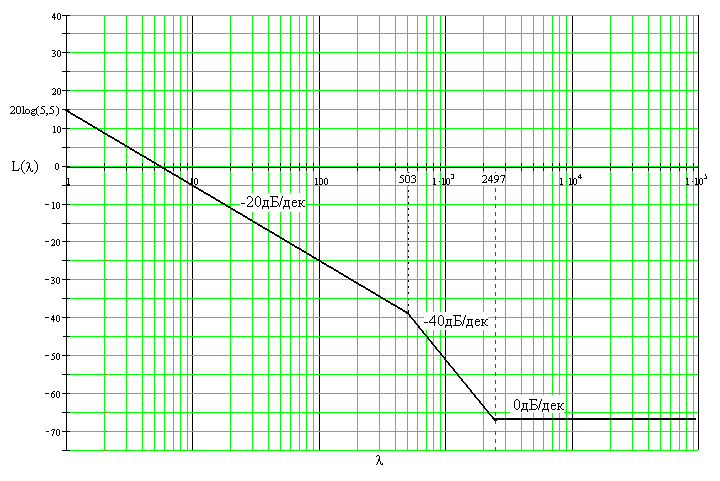

Рисунок 9 – ЛАЧХ
5.2 Построение лфчх
Выделим действительную и мнимую части из передаточной функции для построения ЛФЧХ
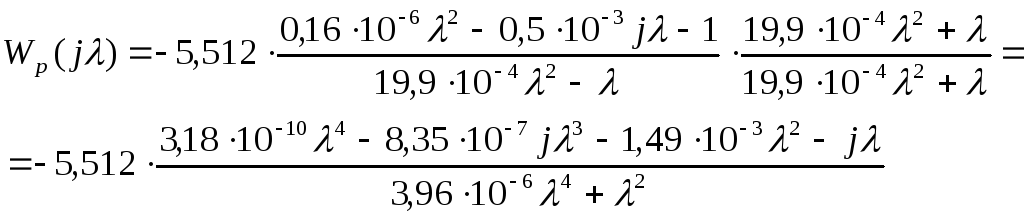 (46)
(46)
![]() (47)
(47)
![]() (48)
(48)
![]() (49)
(49)
![]() (50)
(50)
![]() (51)
(51)
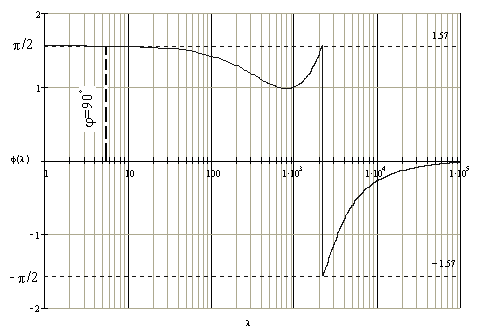
Рисунок 10 - ЛФЧХ
По графикам ЛАЧХ и ЛФЧХ найдем запасы устойчивости по амплитуде и фазе. Запас по амплитуде определяется на частоте, соответствующей точке пересечения ФЧХ с линией –1800. В данном случае ФЧХ не пересекается с прямой –1800, поэтому запас устойчивости по амплитуде является достаточным. Запас устойчивости по фазе – это превышение (ср) над линией –180.
Запас устойчивости по фазе равен (5,512) = 270
6 ПОСТРОЕНИЕ ЖЛАЧХ И ЖЛФЧХ
6.1 Построение ЖЛАЧХ
ЖЛАЧХ – это асимптотическая ЛАЧХ, имеющая желаемые статические и динамические свойства. Для дискретных систем ЖЛАЧХ строится методом запретной зоны. По заданным в техническом задании параметрам находим координаты рабочей точки, через которую проходит граница запретной зоны.
Время регулирования
(по переходному процессу)
![]()
Перерегулирование
(принимаем по ТЗ)
![]()
Колебательность
(принимаем по ТЗ)
![]()
Скорость обработки сигнала
![]() (52)
(52)
Максимальное ускорение
![]() (53)
(53)
Исходя из этих параметров определим амплитуду А и частоту контрольной точки k:
![]() (54)
(54)
Амплитуда рабочей точки:
![]() (55)
(55)
![]() (56)
(56)
![]() (57)
(57)
Таким образом, получили рабочую точку с координатами (2,1; 19,7). Через эту точку проводится прямая с наклоном – 20дБ/дек. Все, что находится под этой прямой - является запретной зоной.
Определим частоту среза для ЖЛАЧХ по номограмме Солодовникова показанной на рисунке 11.
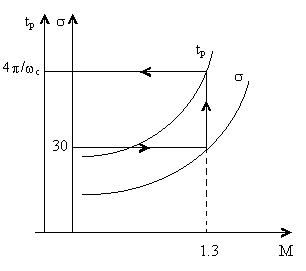
Рисунок 11 – Номограмма Солодовникова
Частота среза равна:
![]() (58)
(58)
Для построения ЖЛАЧХ определим граничные частоты интервала с наклоном –20 дБ/дек.
![]() (59)
(59)
![]() (60)
(60)
![]() (61)
(61)
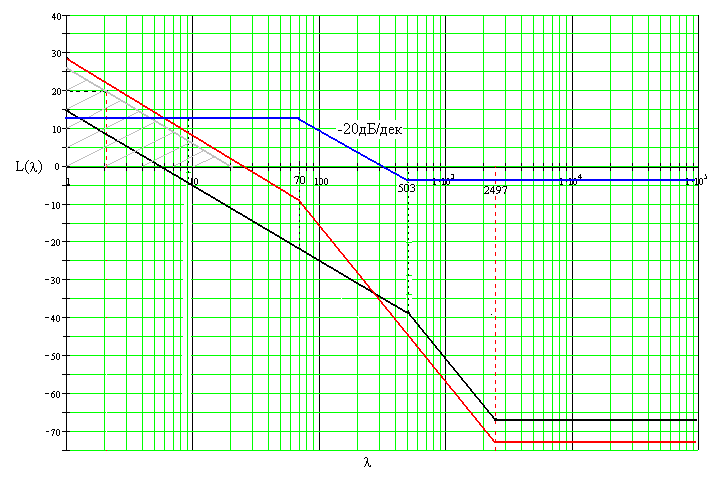
Между этими частотами ЖЛАЧХ должна пересекать ось 0 дБ с наклоном –20 дБ/дек и должна совпадать с ЛАЧХ на низкочастотной и высокочастотной частях. График ЖЛАЧХ изображен на рисунке 12.


Рисунок 12 – ЛАЧХ и ЖЛАЧХ
6.2 Построение ЖЛФЧХ
ЖЛФЧХ строится в зависимости от передаточной функции ЖЛАЧХ, которая равна:

Построим желаемую ЛФЧХ
![]()
![]()
 (62)
(62)
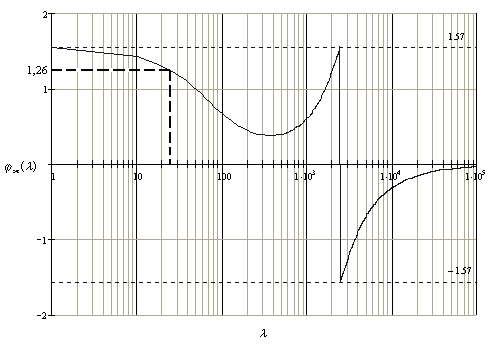
Рисунок 13 – ЖЛФЧХ
По графикам ЖЛАЧХ
и ЖЛФЧХ найдем запасы устойчивости
по амплитуде и фазе. ЖФЧХ не пересекается
с прямой –1800, поэтому запас
устойчивости по амплитуде является
достаточным. Запас устойчивости по
фазе на частоте среза ЖЛАЧХ (![]() )
и равен = 252.
)
и равен = 252.
Как видно из расчетов после перехода к желаемой ЛАЧХ и ЛФЧХ запас устойчивости по амплитуде не изменился, а запас устойчивости по фазе уменьшился с 270 до 252
7 ВЫБОР КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
7.1 Построение ЛАЧХ корректирующего устройства
ЛАЧХ корректирующего устройства определяется вычитанием из ЖЛАЧХ ЛАЧХ.
0дБ/дек -20дБ/дек
желаемая -40дБ/дек
желаемая -40дБ/дек
желаемая 0дБ/дек![]()
П
-20дБ/дек
желаемая
Рисунок 14 – ЛАЧХ корректирующего устройства
По ЛАЧХ корректирующего устройства получим его передаточную функцию [10]:
![]() (64)
(64)
20log(k) = 28 – 14,8 = 13,2 дБ (65)
k = 4,6
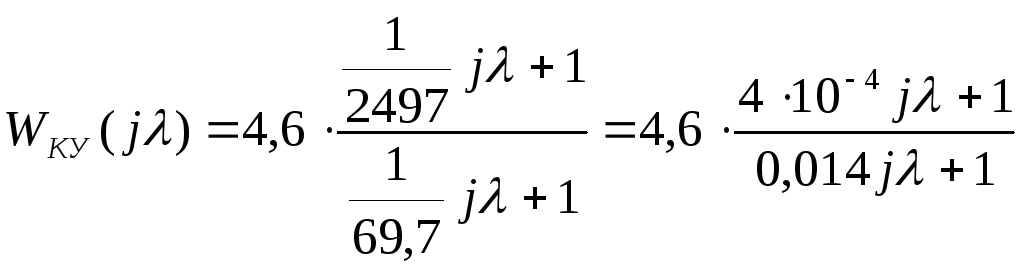 (66)
(66)
Схема аналогового корректирующего устройства приведена ниже на рисунке 15. Она представляет собой RC-цепочку.
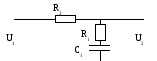
Рисунок 15 – Аналоговое корректирующее устройство
7.2 Расчет КУ
Найдем значения сопротивлений и емкость конденсатора [10]
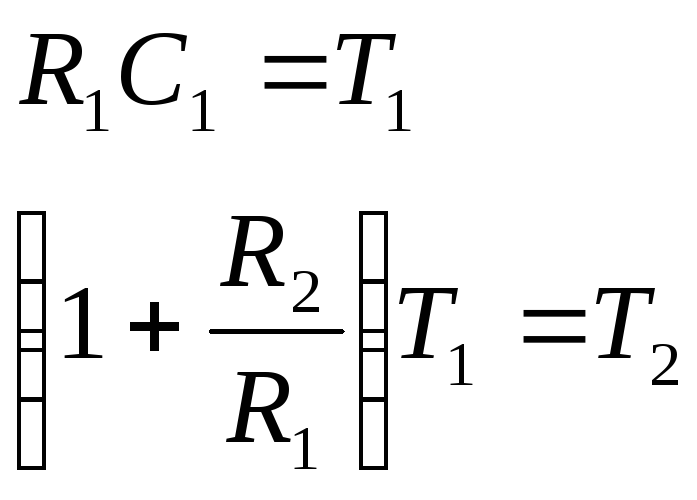
 (67)
(67)
Принимая емкость конденсатора 1 мкФ, получим, что сопротивление R1 равно:
![]() (68)
(68)
Отсюда R2 равно:
![]() (69)
(69)
Для определения оптимального места включения корректирующего устройства проведем анализ системы.
С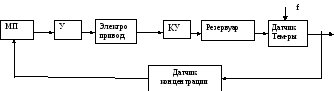 учетом корректирующего устройства
структурная схема системы примет вид
рисунка 16.
учетом корректирующего устройства
структурная схема системы примет вид
рисунка 16.
Рисунок 16 – Структурная схема системы с корректирующим устройством
В низкочастотной части логарифмической оси частот ЛАЧХ корректирующего устройства представляет собой прямую с наклоном 0 дБ/дек, проходящую выше оси частот, следовательно, корректирующее устройство в виде отдельно выделенного в системе устройства должно иметь коэффициент усиления больше 1, значит являться активным элементом. Это не желательно, так как активный элемент усложняет структуру системы, изменяет переходный процесс, вводит в систему дополнительные помехи. Проведенный анализ позволяет сделать вывод о необходимости программной коррекции системы.