

16 Рисунок 6 – жлачх, построенная методом запретной зоны уитс.421243.010 пз
![]()
![]() (21)
(21)
Зададим скорость g’= 12 и ускорение обработки g’’=53 информации, а также показатель колебательности M=1.2, max ошибка регулирования =0,2 (Amax=0.65)
Определяем рабочую точку:
=g’’/g’=53/12=4.44 рад/с – псевдочастота (22)
A= Amax/=0.65/0.2=3.25
![]() Дб
Дб
тогда координаты рабочей точки (4.44 рад/с, 10.2 дБ)
Амплитуда на сопрягающих частотах
L1=![]() (23)
(23)
L2=![]() (24)
(24)
17
УИТС.421243.010
ПЗ
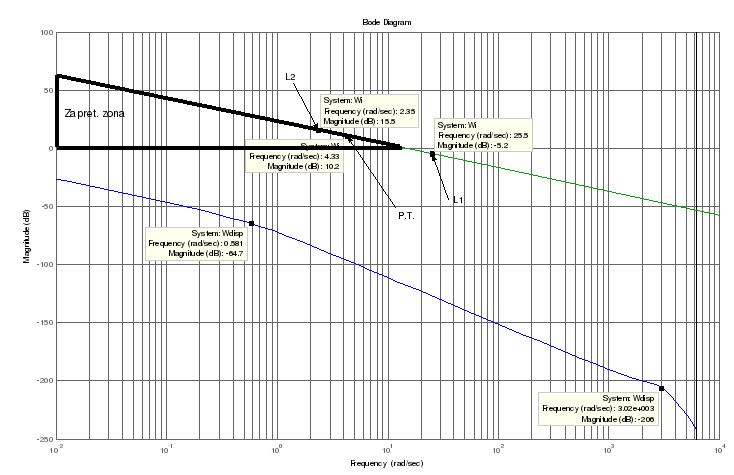
Рисунок 7 –Вид запретной зоны
18
Рисунок 8 – ЖЛАЧХ,
построенная методом запретной зоны
УИТС.421243.010
ПЗ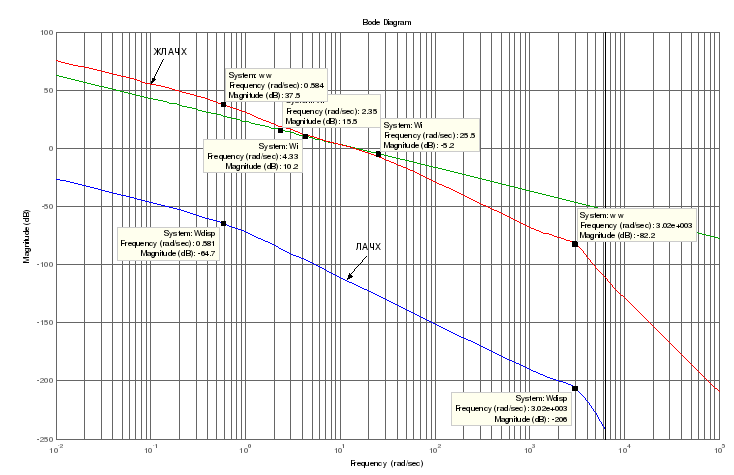
П ередаточная
функция замкнутой системы, скорректированной
методом запретной зоны, будет иметь
вид:
ередаточная
функция замкнутой системы, скорректированной
методом запретной зоны, будет иметь
вид:
![]() . (25)
. (25)
Тогда переходный процесс в замкнутой системе скорректированной методом запретной зоны изобразим на рисунке 9:

Рисунок 9 – Переходный процесс в замкнутой системе, скорректированной методом запретной зоны
Прямые оценки качества переходной характеристики:
1. Время регулирования tp=1,34 c;
2. Перерегулирование σ=0 %.
Данные показатели качества удовлетворяют заданным требованиям. Несоответствие показателей качества с их расчетными значениями объясняются значительным отличием вида вещественной частотной характеристики скорректированной системы от типовой.
19
УИТС.421243.010
ПЗ
5 СИНТЕЗ КОРРЕКТИРУЮЩЕГО ЗВЕНА
СИНТЕЗ КОРРЕКТИРУЮЩЕГО ЗВЕНА
5.1 Синтез непрерывных корректирующих звеньев
Существует несколько способов включения корректирующего звена. Определим желаемую передаточную функцию для каждого из включений и выберем лучшую
Определим желаемую передаточную функцию последовательного корректирующего устройства:
![]() (26)
(26)
Упрощенное выражение:
![]() (27)
(27)
Определим желаемую передаточную функцию встречно – параллельного непрерывного корректирующего устройства:
![]() (28)
(28)
Определим желаемую передаточную функцию параллельного непрерывного корректирующего устройства:
![]() (29)
(29)
Так как реализация корректирующего устройства должна быть по возможности более простой, то анализируя формулы (27), (28), (29).
20
УИТС.421243.010
ПЗ
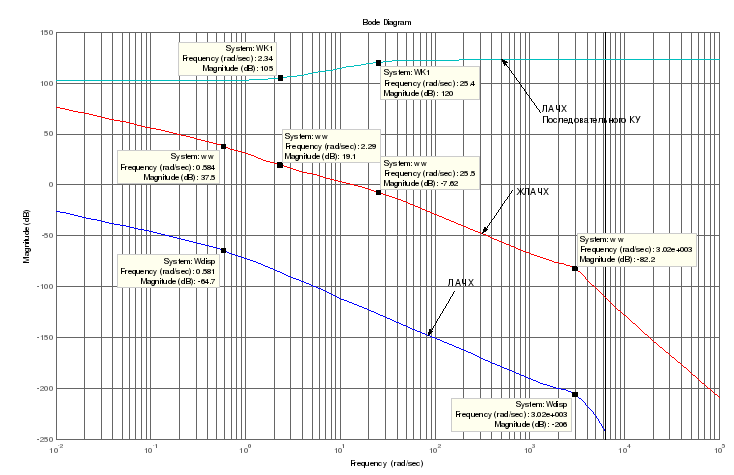
Рисунок 10 – ЛАЧХ последовательного корректирующего устройства
Полученное корректирующее устройство может быть реализовано в виде усилителя с неким коэффициентом усиления.
C1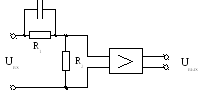 .
.
Рисунок 11 – Схема последовательного корректирующего устройства
Передаточная функция дифференцирующего четырехполюсника:
 ,
(30)
,
(30)
21
УИТС.421243.010
ПЗ
 ,
(31)
,
(31)
где KK1=R2/(R1+R2)=0,4255;
T1=R1*C1= 0,0392;
T2=KK1*T1=0,0921.
При этом усилитель должен иметь коэффициент усиления:
Ку=1249/0.0921= 13565 (32)
5.2 Синтез программного корректирующего звена
Перейдем от непрерывной модели объекта к дискретной, для этого воспользуемся в программе MATLAB функцией преобразования непрерывной модели системы в дискретную (с2d) [7].
Ts=0.001;Wdis=c2d(Wp,0.001) , получим передаточную функцию разомкнутой дискретной системы:
![]() (33)
(33)
Умножая числитель и знаменатель выражения на z-1, получим
![]() (34)
(34)
Для выражения (34) запишем разностное уравнение в реальном масштабе времени, введя в числитель дополнительный сдвиг на z-1.
![]()
;Расчет разностного уравнения
; x - входной сигнал
; y- выходной сигнал
i_port EQU 1lh; номер порта для чтения
22
УИТС.421243.010
ПЗ
A l
EQU 1249;
l
EQU 1249;
B1 EQU 1;
Xl DB 0
;выделение памяти под переменные x(k-l), x(k-2), x(k-3)
yl DB 0
; выделение памяти под переменные y(k-l), y(k-2)
; вычисляем значение выражения
y(k)=Al*х1+В1*у1
start: ;метка начала цикла коррекции
in al, i_port; чтение данных из порта
mov al,Al; вычисление слагаемого А1*х1
mov bl, al; сохранение результата в bl
; в результате имеем А1*х1 в регистре bl
mov al, yl; вычисление
mul al, Bl; слагаемого Bl*yl
add bl, al; прибавление к предыдущему результату
mov yl, bl
mov xl, x;
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
5.3 Выбор корректирующего устройства
23
УИТС.421243.010
ПЗ
С равнивая
эквивалентное время задержки на
корректирующих устройствах (суммируя
время задержки на аналоговых элементах
включенных последовательно и выбирая
большее из времен параллельно включенных)
с временем необходимым на программную
коррекцию (число тактов необходимых на
реализацию операции умножения сигнала
рассогласования на коэффициент ошибки)
приходим к выводу, что программная
коррекция более эффективна.
равнивая
эквивалентное время задержки на
корректирующих устройствах (суммируя
время задержки на аналоговых элементах
включенных последовательно и выбирая
большее из времен параллельно включенных)
с временем необходимым на программную
коррекцию (число тактов необходимых на
реализацию операции умножения сигнала
рассогласования на коэффициент ошибки)
приходим к выводу, что программная
коррекция более эффективна.
Поскольку в системе уже есть встроенный МП, то применение аналогового корректирующего устройства экономически нецелесообразно, так как добавляются новые элементы.
В виду всего вышеперечисленного выбираем программную коррекцию.