

5 Построение логарифимческой амплитудно-частотной и фазо-частотной характеристик системы и их анализ
Построим ЛАЧХ САУ скорости вращения ножей кофемолки. Для этого разомкнем структурную схему по главной обратной связи.
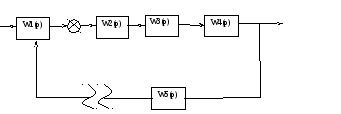
Рисунок 8 – Структурная схема разомкнутой САУ скорости вращения ножей кофемолки
На рисунке 8 отображена структурная схема системы автоматического управления скорости вращения ножей кофемолки. Передаточная функция системы в разомкнутом виде будет равна:
![]() (27)
(27)
Z-преобразование проведем по формуле:
![]() .
(28)
.
(28)
С
помощью MathLab
найдем z-преобразование
от функции
![]() :
:
Transfer function:
0.013
--------------------------------------------
0.001 s^4 + 2500 s^3 + 5700 s^2 + 3200 s + 1
Построим ЛАЧХ по полученной передаточной функции в программе MatLab. ЛАЧХ и ЛФЧХ изображены на рисунке 12.
40


Рисунок 12 – ЛАЧХ и ЛФЧХ САУ скорости вращения ножей кофемолки
6 ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛОГАРИФМИЧЕСКОЙ АМПЛИТУДНО-
ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. Желаемая ЛАЧХ (ЖЛАЧХ) состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Поскольку в исходной САУ присутствует дискретное устройство (микропроцессор), построение желаемой ЛАЧХ (ЖЛАЧХ) ведется методом запретных зон.
Построение ЖЛАЧХ начинаем с построения запретной зоны, геометрия которой определяется положением рабочей точки, но для того, чтобы найти местоположение (координаты) рабочей точки нужно задаться значениями следующих величин:
g'=0,4 (м/с) - скорость изменения выходной величины,
g''=0,04 (м/с2) - ускорение изменения выходной величины,
σд=0,05 - допустимая ошибка.
Найдем значение частоты рабочей точки:
![]() с-1.
(30)
с-1.
(30)
Найдем значение амплитуды рабочей точки:
![]() .
(31)
.
(31)
Таким образом, рабочая точка имеет следующие координаты:
![]() .
.
Через полученные координаты проводим прямую с наклоном -20 дБ/дек.
Эта прямая является верхней границей запретной зоны.
По
номограмме Солодовникова и заданному
в техническом задании перерегулированию
![]() % и времени регулирования tр
= 60 с определяем частоту среза:
% и времени регулирования tр
= 60 с определяем частоту среза:
![]() ,
,
![]() с-1,
с-1,
Перейдем к псевдочастоте:
![]() ,
,
σm,
%![]()
60
50
40
30
20
10
0
1.0
1.1
1.2
1.3
Rm,
Ом
σm
tр
π/ωс
2π/ωс
3π/ωс
4π/ωс



Рисунок 10 – Номограмма Солодовникова
По
заданной колебательности μ=1.5 найдем
среднечастотную область построения
ЖЛАЧХ. Верхней границе этой области
соответствует значение
![]() дБ, нижней -
дБ, нижней -
![]() дБ.
дБ.
Наклон ЖЛАЧХ в среднечастотной области должен быть -20 дБ/дек, поэтому через частоту среза в этой области проводим прямую с наклоном -20 дБ/дек. В высокочастотной области ЖЛАЧХ сопрягается с исходной ЛАЧХ, то есть будет иметь такие же наклоны. Низкочастотная область не имеет большого значения, поэтому достраивается по исходной либо произвольно.