

5 Построение лачх системы и ее анализ
Для того чтобы построить ЛАЧХ системы необходимо найти передаточную функцию разомкнутой системы.
![]() (68)
(68)
![]() (69)
(69)
Передаточная функция разомкнутой системы имеет вид передаточной функции апериодического звена, где k=5.18; Т=0.04.
Логарифмическая характеристика апериодического звена:
![]() (70)
(70)
![]() (71)
(71)
Выполним анализ выражения (71) для следующих диапазонов частот:
пусть
w<![]() или wT<1,
тогда
или wT<1,
тогда
![]() ;
;
пусть
w>![]() или wT>1,
тогда
или wT>1,
тогда
![]()
Таким
образом, на участке w<![]() логарифмическая характеристика проходит
горизонтально и наклона не имеет, а на
участке w
> 1/Т логарифмическая характеристика
будет иметь наклон (-20)дБ/дек.
логарифмическая характеристика проходит
горизонтально и наклона не имеет, а на
участке w
> 1/Т логарифмическая характеристика
будет иметь наклон (-20)дБ/дек.
w=![]() - частота сопряжения, при Т=0.04, w=25
- частота сопряжения, при Т=0.04, w=25
ЛАЧХ проектируемой системы будет иметь вид соответствующий рисунку 11.
L(w)
20

10
0
-10
-20
10
w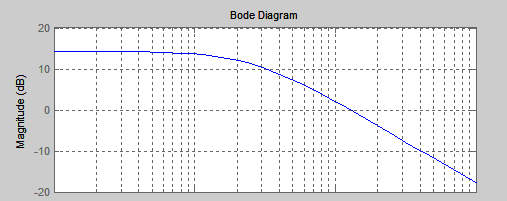

![]()
10
10
10![]()
![]()
Рисунок 11 - ЛАЧХ разомкнутой системы регулирования мышеловкой
Построим ЛФЧХ системы.
![]() (72)
(72)
Если
w=0,
тогда
![]() =0;
=0;
если
w=![]() ,
тогда
,
тогда![]() ;
;
еслиw![]() ,тогда.
,тогда.
![]() .
.
ЛФЧХ проектируемой системы будет иметь вид, соответствующий рисунку 12.
0
w



![]()
-90
-45
10
10
10
10
![]()
![]()
![]()
![]()
Рисунок 12 - ЛФЧХ разомкнутой системы регулирования мышеловкой
Выполним анализ ЛАЧХ и ЛФЧХ и определим запасы устойчивости по амплитуде и фазе.
По фазе запас устойчивости определяется превышением (w) над осью 180 на частоте пересечения L(w) с осью lgw:
![]() (73)
(73)
По амплитуде запас устойчивости определяется превышением L(w) над осью lgw на частоте пересечения (w) с осью 180. Так как (w) не достигает 180, находясь выше этого значения, то запас устойчивости по амплитуде Lз = .
Низкочастотная асимптота имеет наклон (0 дБ/дек) и лежит в области частот от 0 до 25 Гц.
Среднечастотная
асимптота имеет наклон (-20 дБ/дек) и лежит
в области частот от 25
до
![]() Гц.
Гц.
6 ПОСТРОЕНИЕ ЖЛАЧХ СИСТЕМЫ
ЖЛАЧХ для систем строится, используя номограмму Солодовникова. По номограмме Солодовникова определяем частоту среза по заданному перерегулированию и времени регулирования системы:
σm = 20% (74)
tp = 0.5 c (75)
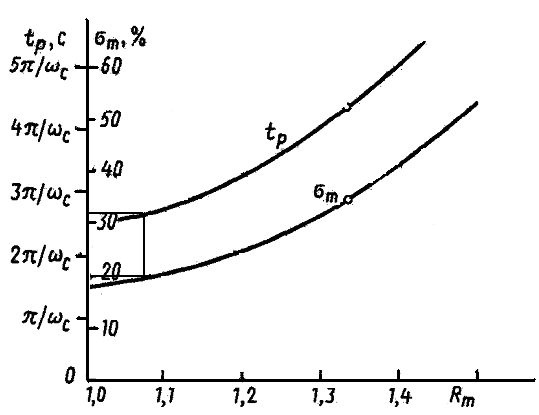
Рисунок 13 - Номограмма Солодовникова
Определение
частоты среза
![]() по
по![]() и
и![]() по
формуле:
по
формуле:
![]() ,
(76)
,
(76)
где k определяется по номограмме Солодовникова (k=2.6).
![]() рад/с
(77)
рад/с
(77)
Среднечастотная асимптота ЖЛАЧХ проводится через точку wc с наклоном (-20 дБ/дек), так как при большем наклоне трудно обеспечить необходимый запас устойчивости и допустимое перерегулирование. Основные динамические свойства связаны с длиной этой асимптоты. Для ее определения примем показатель колебательности М = 2 , тогда:
![]() (78)
(78)
![]() (79)
(79)
Прямые
![]() и
и![]() наносятся
на график параллельно осиlgw.
Они пересекают Lж
в точках (а) и (б). Среднечастотная
асимптота Lж
проходит
из точки (а) под наклоном (-20 дБ/дек).
наносятся
на график параллельно осиlgw.
Они пересекают Lж
в точках (а) и (б). Среднечастотная
асимптота Lж
проходит
из точки (а) под наклоном (-20 дБ/дек).
Низкочастотная асимптота Lж проходит параллельно асимптоте L. При этом получаем новый коэффициент передачи системы: 20lgkж = 6.02; kж = 2
Передаточная функция ЖЛАЧХ.
Wж=![]() (80)
(80)
где kж = 2, Тж=0.1 сек.

Р
 исунок
14 – ЛАЧХ и ЖЛАЧХ системы регулирования
мышеловкой
исунок
14 – ЛАЧХ и ЖЛАЧХ системы регулирования
мышеловкой
Для того чтобы найти запасы устойчивости по фазе и амплитуде необходимо построить ЖЛФЧХ системы.
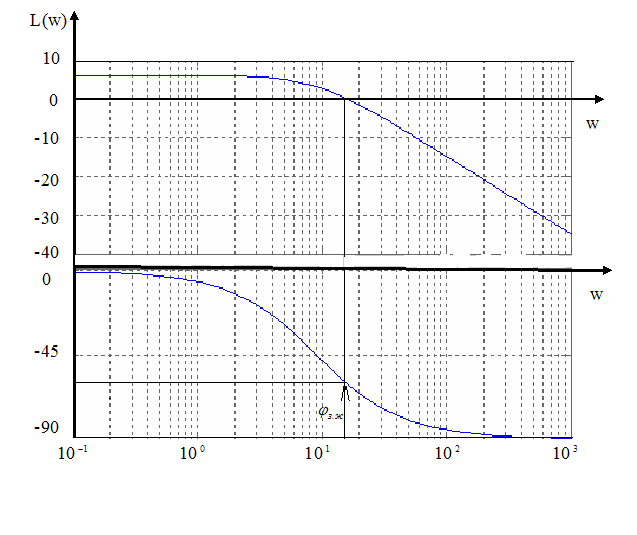

Рисунок 15 – ЖЛАЧХ и ЖЛФЧХ системы регулирования мышеловкой
По
фазе запас устойчивости определяется
превышением (w)
над осью 180
на частоте пересечения L![]() (w)
с осью lgw:
(w)
с осью lgw:
![]() .
(81)
.
(81)
По
амплитуде запас устойчивости определяется
превышением L![]() (w)
над осью lgw
на частоте пересечения
(w)
над осью lgw
на частоте пересечения ![]() (w)
с осью 180.
Так как
(w)
с осью 180.
Так как ![]() (w)
не достигает 180,
находясь выше этого значения, то запас
устойчивости по амплитуде Lз.ж
= .
(w)
не достигает 180,
находясь выше этого значения, то запас
устойчивости по амплитуде Lз.ж
= .
7 ПОСТРОЕНИЕ ЛАЧХ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА РАСЧЕТ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Коррекция динамических свойств САР осуществляется для выполнения требований по точности, устойчивости и качеству переходных процессов.
Коррекция применяется также как средство обеспечения устойчивости неустойчивой системы или расширения области устойчивости, а также повышения качества переходного процесса.
Осуществляется коррекция с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им (существуют и комбинированные способы включения).
Наиболее удобно использовать корректирующее устройство последовательного типа, поскольку оно обеспечивает наиболее простую схему включения, не требует сложных элементов для согласования, передает значительные величины управляющих сигналов (тока, напряжения).
К достоинствам последовательной коррекции можно отнести:
- ускорение переходного процесса;
- снижение установившейся ошибки;
- простоту включения элементов коррекции.
К недостаткам можно отнести:
- увеличение чувствительности к помехам;
- необходимость согласования сопротивления корректирующих элементов с входным и выходным сопротивлением элементов системы, к которым они подключаются;
- снижение величины основного сигнала.
Рассмотрим коррекцию заданной системы с помощью последовательного корректирующего устройства.
Передаточная функция желаемой системы
![]() ,
(82)
,
(82)
где W – передаточная функция разомкнутой САУМ; Wк – передаточная функция корректирующего устройства.
Логарифмируя выражение (82), получим:
![]() (83)
(83)
Логарифмическая характеристика корректирующего устройства
![]() ,
(84)
,
(84)
где Lж – логарифмическая характеристика желаемой системы; L – логарифмическая характеристика САУМ.
Вычитание
производится графически. По построенной
ЛАЧХ корректирующего устройства можно
выполнить переход к передаточной функции
Wк.
Для этого для каждой точки излома ЛАЧХ
корректирующего устройства определяются
частоты сопряжения, соответствующие
постоянным времени. Участку 1-2 Lк
соответствует апериодическому звену
с передаточной функцией
![]() .
На участке 2 -
.
На участке 2 -![]() наклон уменьшается на 20 дБ, значит,
появляется влияние форсирующего звена
(Т2р+1).
наклон уменьшается на 20 дБ, значит,
появляется влияние форсирующего звена
(Т2р+1).
Таким образом, передаточная функция корректирующего устройства
 ,
(85)
,
(85)
где k= 0.386; Т1 = 0,11 с; Т2 = 0,04 с.
![]() (86)
(86)
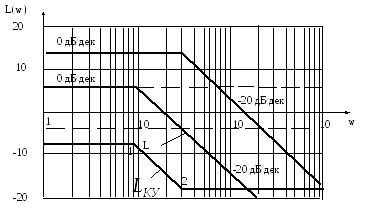
Рисунок 16 – Построение ЛАЧХ КУ
По виду ЛАЧХ КУ и по найденной Wк подбирается соответствующее корректирующее устройство, представленное на рисунке 17.

![]()
![]()
![]()
![]()
Рисунок 17 - Последовательное корректирующее устройство
Используя формулы (87) - (90), рассчитаем параметры корректирующего устройства.
![]()
 (87)
(87)
 (88)
(88)
![]() (89)
(89)
 (90)
(90)
По виду передаточной функции определяем: T1 =0,04, T2 =0,11, L = 0.143, L0 = k = =0.386.
Выбирая
![]() =
10 мкФ, рассчитаем
=
10 мкФ, рассчитаем![]() ,
выразив его из формулы (90):
,
выразив его из формулы (90):
![]() (91)
(91)
![]() к
Ом
(92)
к
Ом
(92)
Рассчитаем
отношение
![]() ,
выразив его из формулы (87):
,
выразив его из формулы (87):
![]()
![]() (93)
(93)
Рассчитаем
![]() ,
выразив его из формулы (88):
,
выразив его из формулы (88):
![]() (94)
(94)
![]() к
Ом
(95)
к
Ом
(95)
Из
формулы (93) определим
![]() :
:
![]() к
Ом
(96)
к
Ом
(96)
Выбранное корректирующее устройство поместим в САУМ, наиболее предпочтительным вариантом включения электрического корректирующего устройства является участок перед двигателем, так как наибольшую ошибку в работу системы вносит датчик угла поворота.

Рисунок 18 – САУМ с включенным в нее корректирующим устройством
Передаточная функция скорректированной системы:
![]() (97)
(97)
Построим график переходного процесса скорректированной системы (рисунок 19).
![]() (98)
(98)

Рисунок 19 – Переходный процесс скорректированной САУМ
По графику переходного процесса (рисунок 19) определим показатели качества САУМ:
-
перерегулирование:
=
![]() ;
;
- время нарастания: tн = 1 сек;
- время регулирования: tр = 0.5 сек.
Скорректированная система удовлетворяет требованиям, предъявляемым к проектироваемой системе в техническом задании.
ЗАКЛЮЧЕНИЕ
В рамках заданной курсовой работы разработана система автоматического управления мышеловкой, которая соответствует требованиям технического задания.
В процессе выполнения курсовой работы были построены логарифмические амплитудно и фазочастотные характеристики, желаемые логарифмические амплитудно и фазочастотные характеристики, были определены запасы устойчивости по данным характеристикам а также с помощью методов синтеза было разработано корректирующее устройство, приводящее параметры системы к величинам из технического задания. В качестве корректирующего устройства используется RC-цепочка.
Таким образом, курс ЛСА был приложен к практической задаче, и она была разрешена в соответствии с теорией.