

7 Расчет и выбор корректирующего устройства
Для коррекции в системе применяется корректирующее устройство последовательного типа. Корректирующее устройство можно включать между различными элементами исходной системы. При выборе места включения руководствуются минимумом вносимой устройством погрешности. Наиболее предпочтительным вариантом является включение корректирующего устройства между микропроцессором и усилителем напряжения, так как RLC – цепочка корректирующего звена легко согласуется с электрическими параметрами ЦАП микропроцессора и усилителем напряжения.
Передаточная функция корректирующего устройства имеет следующий вид:
 ,
(60)
,
(60)
где Т1 = 1\1 = 0,1 с;
Т2 = 1\2 = 0,048 с,
20lg kку = 35 дБ.
![]() .
(61)
.
(61)
Для подбора корректирующего устройства разбиваем передаточную функцию на множители:
![]() .
(62)
.
(62)
Первый множитель корректирующего устройства представляет собой

Рисунок 17 – Корректирующая RC – цепочка
корректирующую RC – цепочку. /12/
Параметры RC цепочки:
![]() с.
(63)
с.
(63)
Задавая R1=1 МОм, определяем емкость С1:
![]() .
(64)
.
(64)
Второй множитель корректирующего устройства представляет собой корректирующую LC – цепочку представленную на рисунке 18.
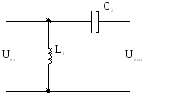
Рисунок 18 – Корректирующая LC – цепочка
Параметры LC цепочки:
![]() с.
(65)
с.
(65)
Задавая С2=5 мФ, определяем индуктивность L1:
![]() .
(66)
.
(66)
Третий множитель корректирующего устройства представляет собой корректирующую цепочку, представленную на рисунке 19.

Рисунок 19 – Корректирующая цепочка
Параметры цепочки:
![]() .
(67)
.
(67)
Задавая R3=1 кОм, определяем сопротивление R2:
![]() .
(68)
.
(68)
Соберем все корректирующие цепочки в одну (рисунок 20).

Рисунок 20 – Корректирующая RC – цепочка
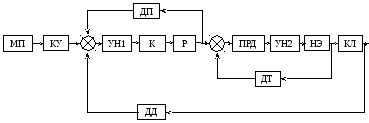
Структурная схема скорректированной системы показана на рисунке 21.
 Рисунок
21 – Структурная схема скорректированной
системы автоматического
Рисунок
21 – Структурная схема скорректированной
системы автоматического
регулирования температуры и давления воздушной смеси аппарата
искусственной вентиляции легких
Коррекцию системы можно произвести при помощи программы для микропроцессора, которая будет реализовывать передаточную функцию корректирующего устройства. Чтобы составить программу, необходимо найти разностное уравнение в реальном масштабе времени.
После
замены
![]() ,
,
![]() ,
передаточная функция корректирующего
устройства примет вид:
,
передаточная функция корректирующего
устройства примет вид:
![]() .
(69)
.
(69)
Разностное уравнение системы выглядит следующим образом:
![]() где
Y
– выходная функция;
где
Y
– выходная функция;
X – входная функция.
Микропроцессор выявляет отклонение полученного сигнала от желаемого и выдает команду на устранение этого отклонения. Значения желаемого сигнала задаются в микропроцессоре в цифровом виде, вычисления осуществляются в машинном коде.
Реализация разностного уравнения на языке Assembler имеет вид:
;РАСЧЕТ РАЗНОСТНОГО УРАВНЕНИЯ
;Y(k) = 1∙X(k) – 3∙X(k-1) + 3∙X(k-2) – 1∙X(k-3) - 1,39Е-2∙Y(k) + 3,99Е-
- 2∙Y(k-1) – 3,86Е-2∙Y(k-2) + 1,26Е-3∙Y(k-3)
;X – входной сигнал
;Y – выходной сигнал
A1 EQU 1; задаем постоянные коэффициенты
А2 EQU 3; задаем постоянные коэффициенты
A3 EQU 3; задаем постоянные коэффициенты
А4 EQU 1; задаем постоянные коэффициенты
А5 EQU 1,39Е-2; задаем постоянные коэффициенты
А6 EQU 3,99Е-2; задаем постоянные коэффициенты
А7 EQU 3,86Е-2; задаем постоянные коэффициенты
А8 EQU 1,26Е-3; задаем постоянные коэффициенты
X0 DB 0; выделение места под Х(k)
X1 DB 0; выделение места под X(k-l)
X2 DB 0; выделение места под X(k-2)
X3 DB 0; выделение места под X(k-3)
Y0 DB 0; выделение места под Y(k)
Y1 DB 0; выделение места под Y(k-1)
Y2 DB 0; выделение места под Y(k-2)
Y3 DB 0; выделение места под Y(k-3)
i port EQU 11h; номер порта для чтения
o port EQU 12h; номер порта для записи
start: метка начала цикла коррекции
in al, i port; читаем из порта данные
MOV X0,al;
MUL a1,A1; вычисление слагаемого А1∙X(k)
MOV b1,a1; сохранение результата в b1
MOV a1,X1;
MUL a1,A2; вычисление слагаемого А2∙X(k-1)
SUB b1,a1; вычисление слагаемого 1∙X(k) – 3∙X(k-1), результат в регистре b1
MOV a1,X2;
MUL a1,A3; вычисление слагаемого А3∙X(k-2)
ADD b1,a1; вычисление слагаемого 1∙X(k) – 3∙X(k-1) + 3∙X(k-2), результат в регистре b1
MOV a1,X3;
MUL a1,A4; вычисление слагаемого А4∙X(k-3)
SUB b1,a1; вычисление слагаемого 1∙X(k) – 3∙X(k-1) + 3∙X(k-2) – 1∙X(k-3), результат в регистре b1
MOV a1,Y0;
MUL a1,A5; вычисление слагаемого А5∙Y(k)
SUB b1, a1; вычисление слагаемого 1∙X(k) – 3∙X(k-1) + 3∙X(k-2) – 1∙X(k-3) - 1,39Е-2∙Y(k), результат в регистре b1
MOV a1,Y1;
MUL a1,A6; вычисление слагаемого А6∙Y(k-1)
ADD b1, a1; вычисление слагаемого 1∙X(k) – 3∙X(k-1) + 3∙X(k-2) –1∙X(k-3) - 1,39Е-2∙Y(k) + 3,99Е-2∙Y(k-1), результат в регистре b1
MOV a1,Y2;
MUL a1,A7; вычисление слагаемого А7∙Y(k-2)
SUB b1, a1; вычисление слагаемого 1∙X(k) – 3∙X(k-1) + 3∙X(k-2) – 1∙X(k-3) - 1,39Е-2∙Y(k) + 3,99Е-2∙Y(k-1) – 3,86Е-2∙Y(k-2), результат в регистре b1
MOV a1,Y3;
MUL a1,A8; вычисление слагаемого А8∙Y(k-3)
ADD b1, a1; вычисление значения всего выражения 1∙X(k) – 3∙X(k-1) + 3∙X(k-2) – 1∙X(k-3) - 1,39Е-2∙Y(k) + 3,99Е-2∙Y(k-1) – 3,86Е-2∙Y(k-2) +1,26Е-3∙Y(k-3), результат в регистре b1
MOV Y3,Y2; сохранение значений для следующего такта
MOV Y2,Y1; сохранение значений для следующего такта
MOV Y1,Y0; сохранение значений для следующего такта
MOV Y0,b1; сохранение значений для следующего такта
MOV X3,X2; сохранение значений для следующего такта
MOV X2,X1; сохранение значений для следующего такта
MOV X1,X0; сохранение значений для следующего такта
MOV X0,a1; сохранение значений для следующего такта
out о port,b1; вывод управляющего сигнала из b1
JMP start; замыкание цикла.
Из анализа программы следует, что для ее реализации требуются следующие операции: логические (переадресации), короткие (сложение, вычитание) и длинные (умножение). Для используемого микропроцессора время переадресации п = 5,0 мкс, коротких операций к = 9,2 мкс, а длинных операций д = 120 мкс.
В результате можно найти время выполнения всей программы:
в. пр. = 20·5·10-6 + 7·9,2·10-6 + 8·120·10-6 = 1,12410-3 c.
Время срабатывания RCL – цепочки равна сумме срабатывания отдельных ее элементов.
ср = с1+с2+L1 =10-7+5·10-3+0,46=0,47 с.
Блок-схема программы коррекции системы представлена на рисунке 22.
1
Рисунок 22 – Блок схема программы коррекции системы
Вывод: была разработана программа коррекции для микропроцессора на языке Assembler и рассчитано корректирующее устройство на RLC-цепочках.
ЗАКЛЮЧЕНИЕ
Разработанное устройство отвечает требованиям технического задания. С помощью анализа системы был выявлен недостаток – несоответствие ЛАЧХ системы с типовой ЛАЧХ, обеспечивающей наиболее оптимальные показатели качества системы автоматического регулирования. С помощью метода синтеза было разработано корректирующее устройство, приводящее систему к устойчивому виду. В качестве корректирующего устройства может быть использовано как RLC – цепочка, так и управляющая программа на языке Assembler. Поскольку в системе имеется микропроцессор, то для наиболее полного использования его возможностей, предпочтительней корректирующее устройство реализовывать в качестве рабочей программы, так как время обрабатываемых микропроцессором сигналов (1,12 мс) меньше времени обработки сигналов корректирующим устройством в виде RLC – цепочки (0,47 с). В настоящее время систему автоматического регулирования температуры и давления воздушной смеси аппарата искусственной вентиляции легких можно успешно применять, например, в медицинском оборудовании. При этом будет обеспечиваться необходимый уровень температуры и давления воздушной смеси.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Алексеев С.П., Алексин А.Г. и др. Что такое. Кто такой: В 3 т. Т.I. – 3-е изд., переработанное и дополненное- М.: Педагогика, 1990.- 384с.:ил.
2. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1996. - 992с.
3. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1980. - 976с.
4. Грудинский П.Г. Электротехнический справочник: в 3-х т. – М.: Энергия, 1974. –Т.1.- 776с
5. Зуев П. О. Микропроцессоры в бытовой технике. – М.: Радио и связь, 1985. – 72 с.
6. Морилов А.А. Журнал Chip News. – М.: PC Magazine, 2005. - №7. – С.46-50.
7. Намерин А.Н. Журнал Aplisens. – USA: Bork, 2005. - №5. – C.76-77.
8. Солодовников, В. В., Плотников А. В. Основы теории и элементы САР. М: Машиностроение, 1985.
9. Сухов Н. Интегральные ОУ в усилителях мощности // Радио. – 1986. - №6. – С. 45-47.
10. Сырицо А. Интегральные ОУ в усилителях мощности // Радио. – 1982. - № 11. – С. 41 - 44.
11. Тамм И.Е. Основы теории электричества. - М.: Государственное издательство технико-технической литературы. 1954. - 620с.
12. Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования: Учеб. Пособие для втузов. - М.: Машиностроение, 1989 - 752с.
13. Шаталов. А. С. Теория автоматического управления. Учебное пособие для вузов. М.: Высшая школа, 1977.
ПРИЛОЖЕНИЕ А
(обязательное)
Графическая часть
1. Функциональная схема САУ громкостью звука 1
2. Устойчивость САУ 2
3. Переходный процесс замкнутой САУ 3
4. ЛАЧХ, ФЧХ, ЖЛАЧХ, ЖФЧХ, ЛАЧХ КУ 4
5. Подбор корректирующего устройства 5
6. Блок схема программы коррекции 6