

Построение диаграммы качества
Уравнение нелинейной системы имеет следующий вид:
Q(p)x+R(p)F(x,px)=0
Будем рассматривать колебательные переходные процессы как собственные колебания и если выполнены условия метода гармонической линеаризации, то колебательный переходный процесс будем искать в виде:
x=a(t)sin(ψ(t)), da/dt=a*ξ (a), dψ/dt=ω(a).
При ξ<0 процесс затухает, ξ>0 – процесс расходится, ξ=0 – в системе периодический режим.
Гармоническая линеаризация нелинейности изменится:
x= a(t)sin(ψ(t)), px= a(t)*ω(a)*cos(ψ(t))+ a(t)* ξ (a)*sin(ψ(t)).
Тогда получим:
sin(ψ(t))=x/a, cos(ψ(t))=(p-ξ)*x/(a(t)*ω(a))
Тогда получим:
F(x,px)=[q(a)+b(a)*(p-ξ)/ω]*x
Следовательно, характеристическое уравнение гармонически линеаризованной системы:
Q(p)+R(p)[q(a)+b(a)*(p-ξ)/ω]=0.
Чтобы процесс был колебательным корни должны быть комплексными p= ξ +jω:
Q(ξ+jω)+R(ξ+jω)[q(a)+jb(a)]=0.
По данному уравнению можно построить диаграмму качества системы как зависимость a=a(k) при различных постоянных значениях ξ.
Построим диаграмму качества переходного процесса для электромеханической следящей системы.
Характеристическое уравнение замкнутой гармонически линеаризованной нелинейной системы:
P*(1+pT1)* (1+pTм)+kлч*[q(A)+jb(A)]=0. (8.1)
Для построения диаграммы качества в полиноме (8.1) произведем подстановку p= ξ +jω:
(ξ+jω)*(1+( ξ+jω)T1)* (1+( ξ+jω)Tм)+kлч*[q(A)+jb(A)]=0
После преобразования получим:
(T2*ξ3+T3*ξ2+ξ -ω2*(3*T2*ξ +T3))+j(3*T2*ξ2+2* T3*ξ +1-ω2*T2)*ω+ kлч*[q(a)+jb(a)]=0(8.2)
где T2= T1* Tм , T3= T1+ Tм .
Выделив в уравнении (8.2) действительную и мнимую части, получим систему из двух уравнений:

Выразим
![]() из
второго уравнения и подставим в первое.
из
второго уравнения и подставим в первое.
![]()
г![]() де
де
Задаваясь различными значениями
амплитуды колебаний
![]() и при выбранных постоянных значениях
показателя затухания
и при выбранных постоянных значениях
показателя затухания![]() строим семейство кривых
строим семейство кривых![]() (рис.15).
(рис.15).
Диапазон изменения амплитуды:
![]()
Кривая
![]() соответствует
автоколебаниям в системе и представляет
собой зависимость амплитуды автоколебаний
соответствует
автоколебаниям в системе и представляет
собой зависимость амплитуды автоколебаний![]() от коэффициента усиления
от коэффициента усиления![]() .
Область, лежащая правее прямой (ξ=0),
является областью существования
автоколебаний. Область, расположенная
левее этой прямой, является областью
устойчивого равновесного состояния
системы.
.
Область, лежащая правее прямой (ξ=0),
является областью существования
автоколебаний. Область, расположенная
левее этой прямой, является областью
устойчивого равновесного состояния
системы.
ξ=1
ξ=2
ξ=-1
ξ=-2
ξ=0
Рис.15Диаграмма качества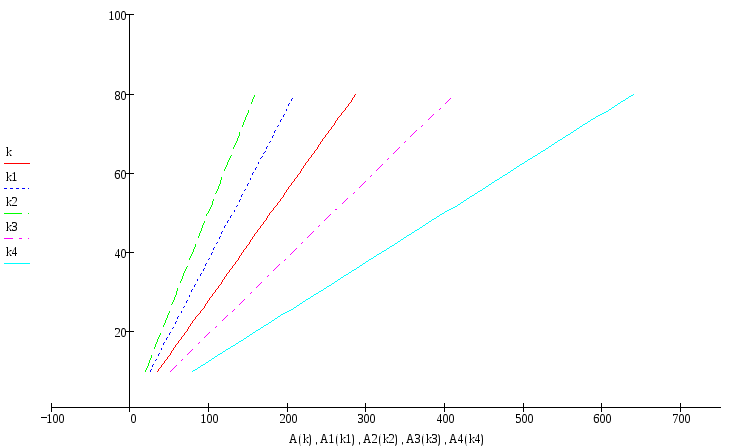
![]()
![]()
![]()
![]()
![]()
![]()

![]()

![]()
![]()
Заключение.
В данной курсовой работе было проведено исследование электромеханического следящего привода как замкнутой автоматической системы управления, поддерживающей выходной сигнал в соответствии с входным регулирующим воздействием.
При заданных параметрах в следящей системе при отсутствии входного сигнала автоколебаний не наблюдается, что было доказано построения фазового портрета.
При синусоидальном входном воздействии
в зависимости от значений амплитуды
![]() и
частоты
и
частоты![]() в системе могут наблюдаться как
одночастотные вынужденные колебания,
так и сложное движение, включающее в
себя и собственную частоту системы.
в системе могут наблюдаться как
одночастотные вынужденные колебания,
так и сложное движение, включающее в
себя и собственную частоту системы.
При оценке влияния параметров ЛЧ и НЭ на процессы в ЗНСАУ получили: изменения параметров ЛЧ и НЭ влияют на амплитуду и частоту ПР и могут привести к затухающему процессу в системе.
При построении диаграммы качества были определены области параметров системы, характеризующие качество колебательных переходных процессов.
В результате работы были изучены такие программные продукты, как Mathcad13 иMATLAB7. Также были изучены основные принципы проектирования автоматических систем управления.