

Описание работы системы, пф ее элементов.
Пример электромеханической следящей системы показан на рис.1.
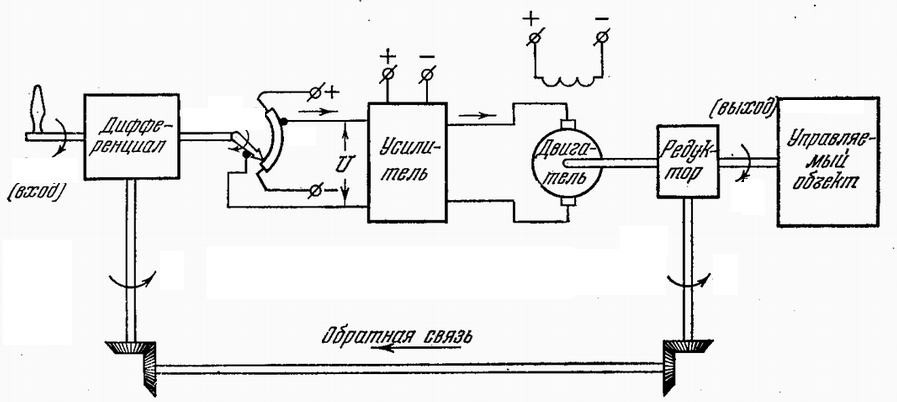
рис 1.
Принцип её действия
следующий. На входе вращением рукоятки
задается произвольный закон для угла
поворота во времени
![]() .
Тот же самый закон угла поворота во
времени должен быть автоматически
воспроизведен на выходе системы, т.е.
на управляемом объекте:
.
Тот же самый закон угла поворота во
времени должен быть автоматически
воспроизведен на выходе системы, т.е.
на управляемом объекте:![]() .
Для этой цели угол поворота на выходе
.
Для этой цели угол поворота на выходе![]() передается при
помощи вала обратной связи на вход
системы, где он вычитается из задаваемого
угла
передается при
помощи вала обратной связи на вход
системы, где он вычитается из задаваемого
угла![]() .
Это вычитание осуществляется при помощи
механического дифференциала. Если угол
на выходе
.
Это вычитание осуществляется при помощи
механического дифференциала. Если угол
на выходе ![]() не равен углу входе
не равен углу входе
![]() ,
то третий валик дифференциала повернется
на разность этих углов
,
то третий валик дифференциала повернется
на разность этих углов
![]() –рассогласование. Пропорциональное
ей напряжениеU
подается через усилитель на приводной
двигатель, который вращает выходной
вал системы. Если же
–рассогласование. Пропорциональное
ей напряжениеU
подается через усилитель на приводной
двигатель, который вращает выходной
вал системы. Если же ![]() =
=![]() ,
то двигатель обесточен и вращения не
будет. Следовательно, система все время
работает на уничтожения рассогласования
,
то двигатель обесточен и вращения не
будет. Следовательно, система все время
работает на уничтожения рассогласования
![]() ,
решая,
таким образом, задачу воспроизведения
на выходе θ2
произвольно задаваемой на входе величины
,
решая,
таким образом, задачу воспроизведения
на выходе θ2
произвольно задаваемой на входе величины
![]() .
Такая система позволяет при незначительной
мощности на входе управлять любыми
мощными или тяжелыми объектами.
.
Такая система позволяет при незначительной
мощности на входе управлять любыми
мощными или тяжелыми объектами.
Усилитель, показанный на рис.1, функционально можно разделить на линейный усилитель и релейный усилитель с соответствующей статической характеристикой.
По принципиальной схеме рис.1 составим структурную схему электромеханического релейного следящего привода, где обозначено:
![]() -
углы поворота командной и исполнительной
осей соответственно;
-
углы поворота командной и исполнительной
осей соответственно;
![]() - рассогласование (ошибка);
- рассогласование (ошибка);
![]() -
напряжение на выходе чувствительного
элемента;
-
напряжение на выходе чувствительного
элемента;
![]() -
напряжение на выходе линейного усилителя;
-
напряжение на выходе линейного усилителя;
![]() -
напряжение на выходе релейного усилителя;
-
напряжение на выходе релейного усилителя;
![]() - угол поворота двигателя.
- угол поворота двигателя.


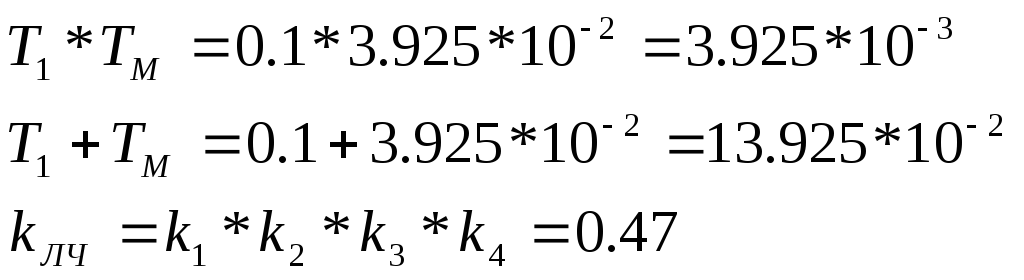
Исходные данные:
k1=60В/рад – крутизна статической характеристики чувствительного элемента;
k2=2- коэффициент усиления линейного усилителя;
![]() с
– постоянная времени линейного усилителя;
с
– постоянная времени линейного усилителя;
![]() –
коэффициент передачи двигателя
–
коэффициент передачи двигателя
![]() ,
рад*В-1*с-1, где
,
рад*В-1*с-1, где
![]() В
– максимальное напряжение на выходе
релейного усилителя,
В
– максимальное напряжение на выходе
релейного усилителя,
![]() об/мин – скорость холостого хода,
об/мин – скорость холостого хода,
тогда получим значение:
![]() рад*В-1*с-1;
рад*В-1*с-1;
![]() -
электромеханическая постоянная времени
двигателя, гдеJ=1,0*10-6кг/м2– момент инерции всех
вращающихся частей, приведенный к валу
двигателя,
-
электромеханическая постоянная времени
двигателя, гдеJ=1,0*10-6кг/м2– момент инерции всех
вращающихся частей, приведенный к валу
двигателя,
![]() Н*м – пусковой момент двигателя,
Н*м – пусковой момент двигателя,
![]()
![]() - коэффициент усиления редуктора, где
- коэффициент усиления редуктора, где
![]() -
передаточное число редуктора,
-
передаточное число редуктора,
![]()
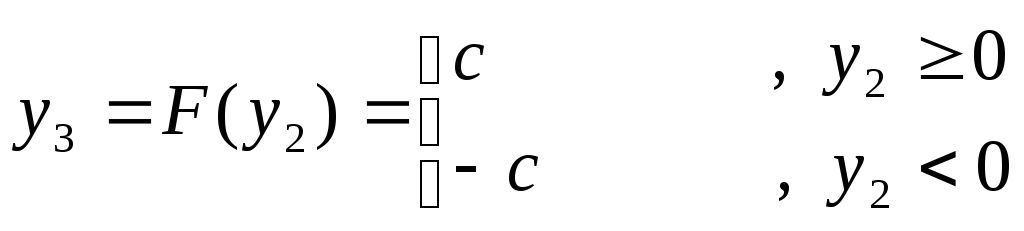
Вид нелинейности – идеальный реле (рис. 2):

Рис.2 Идеальное реле
Система состоит из следующих элементов:![]()
Чувствительный элемент
![]()
Линейный усилитель
![]()
Релейный усилитель
4) Двигатель
![]()
5) Редуктор
![]()
Составление дифференциальных уравнений замкнутой нелинейной сау.
П реобразуем
схему следящей системы относительно
входного сигнала нелинейного элемента.
реобразуем
схему следящей системы относительно
входного сигнала нелинейного элемента.
![]()
![]()
![]()
В автономной системе в режиме стабилизации
угла поворота рабочего механизма входное
воздействие
![]() ,
тогда
,
тогда
![]()
![]()
Передаточная функция линейной части имеет вид
![]() .
.
![]()
Дифференциальное уравнение линейной части:
![]()
![]() - уравнение нелинейного элемента.
- уравнение нелинейного элемента.
Уравнение ЗНСАУ:
![]()
Тогда
![]()
Построение фазового портрета системы, определение периодического режима, его устойчивости и параметров.
Если пренебречь произведением T1*TM , то дифференциальное уравнение ЗНСАУ примет вид:
![]()

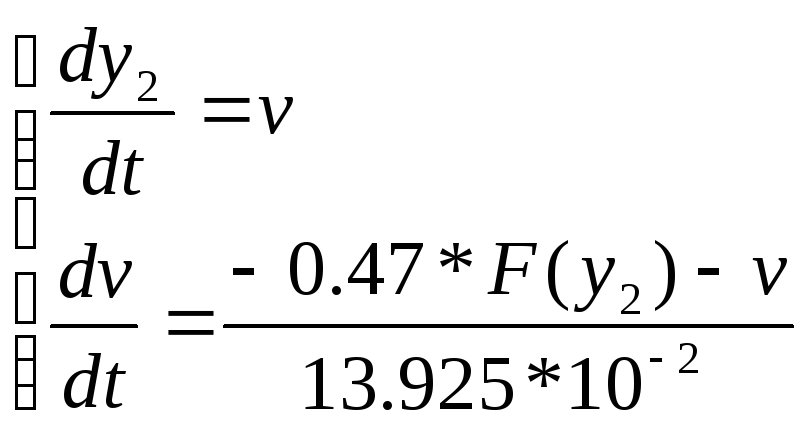
![]()
 – уравнение фазовой скорости в общем
виде.
– уравнение фазовой скорости в общем
виде.

Участок (I):
![]() =
c=100
=
c=100

![]() (4.1)
(4.1)
(4.1)-уравнение фазовой траектории на участке (I)
где с1 - постоянная интегрирования, определяемая из начальных условий.
c1= -25.163 начальные условия:y2= 0V= 5
![]()
Участок (II):
![]() =c= -100
=c= -100

![]() (4.2)
(4.2)
(4.2) - уравнение фазовой траектории на участке (II),
где с2 - постоянная интегрирования, определяемая из начальных условий.
c2 = 25.163 - начальные условия:y2 =0,V= -4.65
![]()
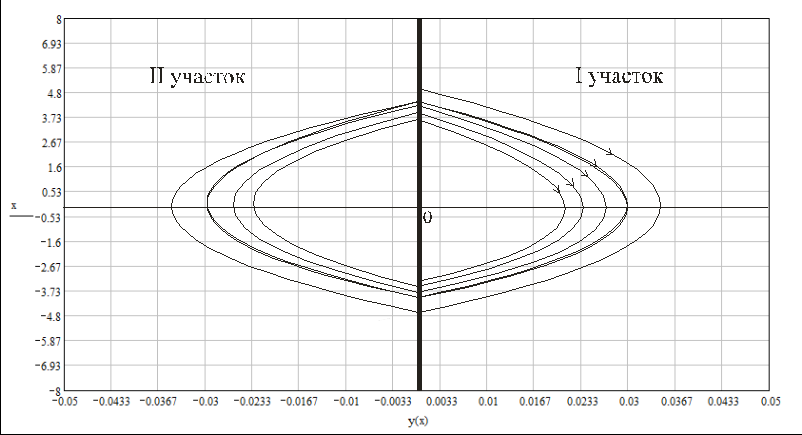
Далее мы строим фазовый портрет системы при разных начальных условиях, соответствующей для каждого участка (рис. 3).
Рис. 3 фазовый портрет системы
П
Рис. 2 ФП нелинейного элемента
Таблицы значений по промежуткам:
участок (І) участок(ІІ) участок(ІІІ) участок(ІV) участок(V)


участок(VI) участок(VII) участок(VIII) участок(IX) участок(X)

Исследование нелинейной САР при входном воздействии f(t)=B*sin(ωt).
Рассмотрим нелинейную систему с внешним воздействием: g(t)=B*sin(ωt) (5.1)
f(t)
Уравнение динамики системы имеет вид
Q (p)x+R(p)F(x,px)=S(p)f(t)
(5.2)
(p)x+R(p)F(x,px)=S(p)f(t)
(5.2)
Решение для вынужденных колебаний будем искать в форме
x= A*sin(ωt+φ), (5.3) y x
где ω задано, а неизвестными являются амплитуда А и фаза φ.
Гармоническая линеаризация нелинейности:
F(x,px)={q(A)+(b(A)/ω)*p}x, (5.4)
Подставим (5.1), (5.3), (5.4) в уравнение системы (5.2):
[Q(p)x+R(p)(q(A)+(b(A)/ω)*p)]*A*sin(ωt+φ)=S(p)B*sin(ωt) (5.5)
Подставив сюда p=jω,sin(ωt)=ejωt, тога получим
[Q(jω)+R(jω)( q(A)+jb(A))]* A*ej(ωt+φ)=S(jω)Bejωt, (5.6)
или
Z(A)= Be-jφ, (5.7)
где Z(A)= A*[Q(jω)+R(jω)( q(A)+jb(A))]/S(jω) (5.8)
Построив графики уравнений (5.7), (5.8) графически определяем наличие вынужденных колебаний и его параметров. Обратимся к нашей системе.

Выведем уравнение динамики системы вида (5.2)
![]() ,
,
где θ1=g(t)=B*sin(ωt)

Согласно уравнению (5.2):
![]()
![]()
![]()
Подставим полученные значения в уравнение (5.8)

Тогда получим уравнение для построения Z(A):
![]()
![]()
w=4 w=10 w=15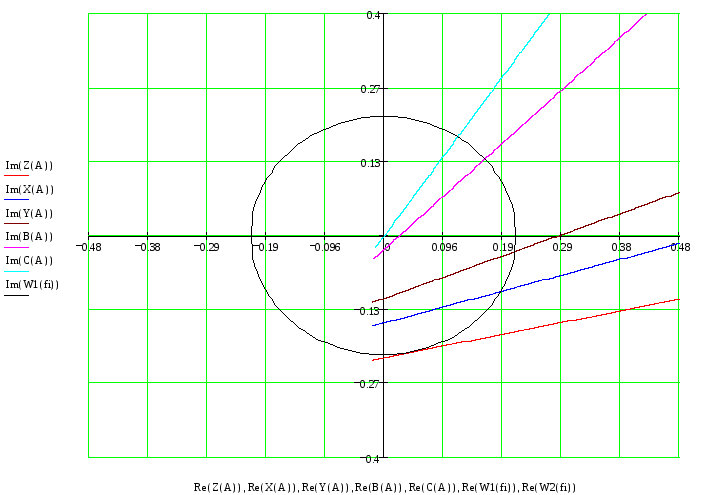
Рис. 4 нахождение Впорпри w=2.2 w=2.2 w=3
На комплексной плоскости (рис. 4)
построено 1 график
![]() при
при![]() и
и
5 графиков Z(A)
по формуле (5.8) при различных значениях![]() :
:![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
АмплитудаAизменяется в
диапазоне от 0.3 до 300.
.
АмплитудаAизменяется в
диапазоне от 0.3 до 300.
при Впор=0.215:
если w=3, то A=25.069
если w=4, то A= 27.859
если w=10, то A= 21.788
если w=15, то A= 16.217
Согласно графику окружность
![]() пересекает
кривую при данном значении частоты
внешнего воздействия
пересекает
кривую при данном значении частоты
внешнего воздействия![]() только при радиусе, большем некоторого
порогового значения
только при радиусе, большем некоторого
порогового значения![]() .
То есть, вынужденные одночастотные
колебания в системе возможны только
при соблюдении условия
.
То есть, вынужденные одночастотные
колебания в системе возможны только
при соблюдении условия![]() .
.
![]()

При
![]() согласно формуле
согласно формуле![]() при
при![]() .
.
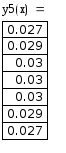
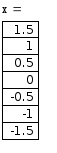
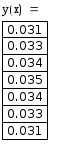
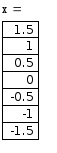
Построив серию кривых
![]() для разных значений частоты внешнего
воздействия
для разных значений частоты внешнего
воздействия![]() ,
получим график зависимости порогового
значения
,
получим график зависимости порогового
значения![]() от частоты
от частоты![]() (рис.
5).
(рис.
5).
область захватывания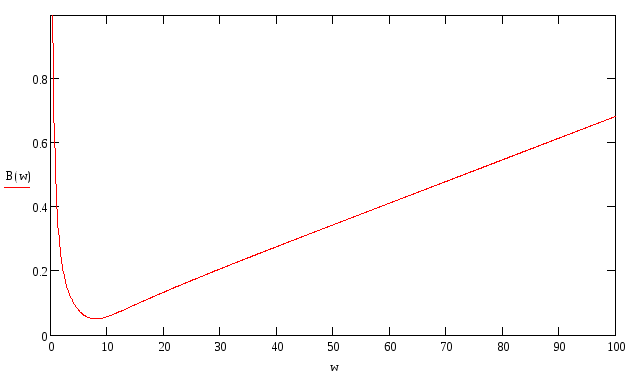










Рис. 5 область захватывания
Получили область
![]() (рис. 5), в которой существуют одночастотные
вынужденные колебания, так называемуюобласть захватывания.
(рис. 5), в которой существуют одночастотные
вынужденные колебания, так называемуюобласть захватывания.