

курсовая работа / Курс / ТАУ
.doc
2. АНАЛИЗ ЛИНЕЙНОЙ САУ
2.1. Нахождение передаточной функции и построение АФЧХ
Найдем передаточную функцию линейной системы. Для этого объединим звенья. Передаточные функции параллельных звеньев складываются, а последовательных – перемножаются.

![]()
Найдем передаточную функцию части схемы с обратной связью
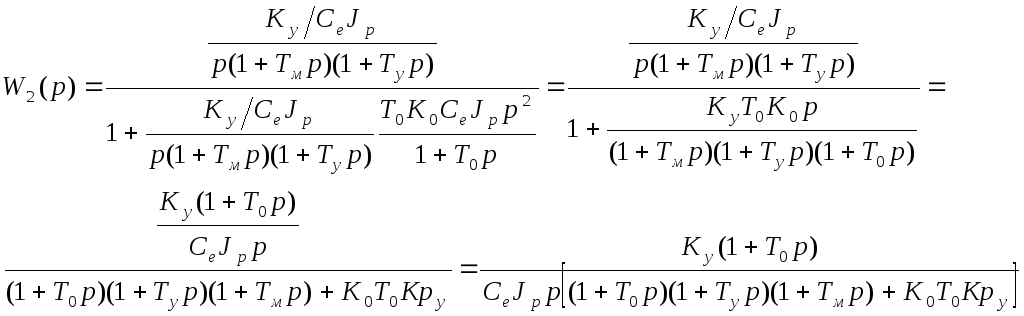

Передаточная функция разомкнутой системы имеет вид:
![]()


Передаточная функция замкнутой системы:

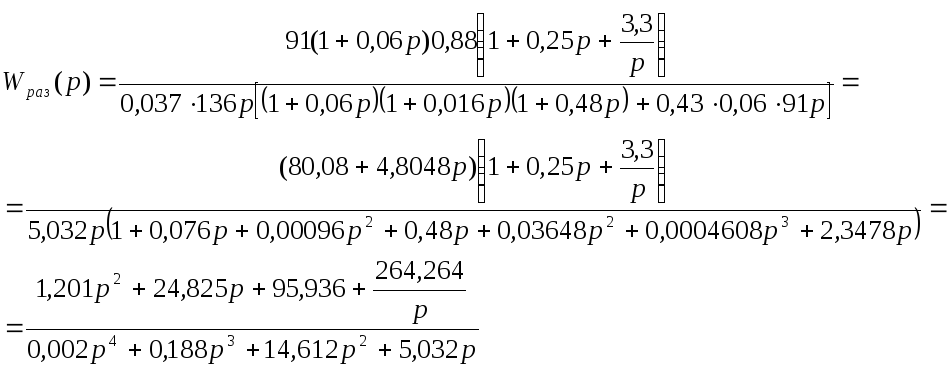
Представим функции в числовом виде

При проверке на устойчивость данная система оказалась неустойчива. Главный определитель Гурвица получается отрицательным, а переходный процесс в системе имеет вид рисунка 1.

![]()
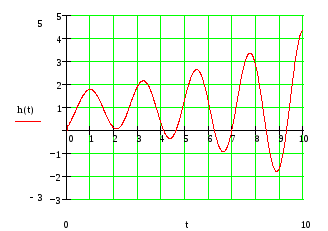
Рис.1. Переходный процесс в системе (с заданными коэффициентами)
Для того, чтобы система была устойчивой заменим значение коэффициента Т0 с 0,06 на 0,006.
Подставим значения коэффициентов в передаточную функцию, получим:
Передаточная функция разомкнутой системы

Передаточная функция замкнутой системы

Перейдем к частотной форме записи функций. Выделим действительную и мнимую часть.
![]()

![]()
![]()
Подставляя различные значения получим координаты точек для кривой АФЧХ разомкнутой системы. При = 0, Uраз() - и Vраз()
-
Uраз()
Vраз()
1
-39.341
12.932
2
-6.657
1.825
3
-2.349
-0.161
4
-1.177
-0.598
5
-0.716
-0.677
10
-0.195
-0.482
15
-0.111
-0.337
20
-0.083
-0.254
25
-0.069
-0.201
30
-0.061
-0.165
35
-0.056
-0.139
40
-0.052
-0.118
45
-0.049
-0.102
50
-0.046
-0.089
55
-0.044
-0.078
60
-0.042
-0.069
65
-0.040
-0.061
70
-0.038
-0.055
75
-0.036
-0.049
80
-0.034
-0.044
85
-0.033
-0.040
90
-0.031
-0.036
95
-0.030
-0.032
100
-0.028
-0.029
АФЧХ разомкнутой системы показана на рисунке 2.
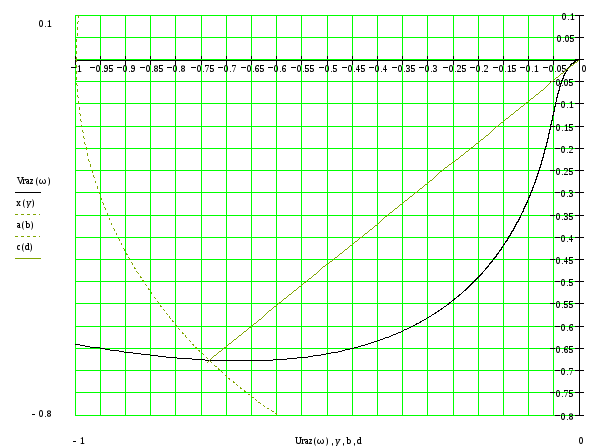
Рис. 2. АФЧХ разомкнутой системы
Для замкнутой системы:
![]()
![]()

Выделяя реальную и мнимую часть, получим:
![]()
![]()
Координаты точек для АФЧХ замкнутой системы
-
Uзам()
Vзам()
0
1
0
1
1.023
0.008
2
1.160
0.052
3
1.731
-0.087
4
1.455
-1.536
5
0.473
-1.255
10
0.085
-0.547
15
0.016
-0.373
20
-0.012
-0.280
25
-0.026
-0.222
30
-0.033
-0.182
35
-0.037
-0.152
40
-0.039
-0.129
45
-0.039
-0.112
50
-0.039
-0.097
55
-0.039
-0.085
60
-0.038
-0.075
65
-0.037
-0.066
70
-0.036
-0.059
75
-0.035
-0.053
80
-0.033
-0.047
85
-0.032
-0.042
90
-0.031
-0.038
95
-0.029
-0.034
100
-0.028
-0.031
АФЧХ замкнутой системы показана на рисунке 3.
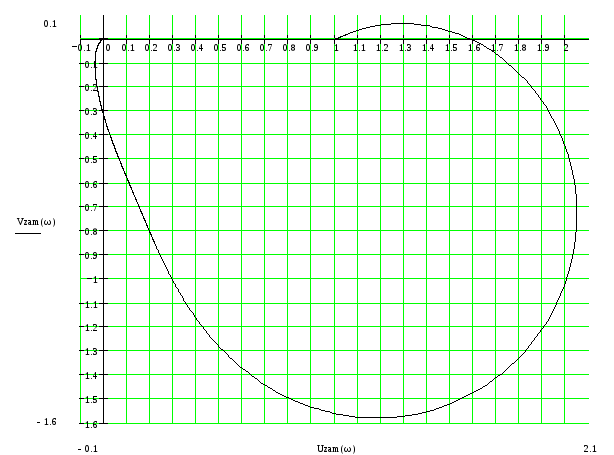
Рис. 3. АФЧХ замкнутой системы.
2.2. Исследование устойчивости системы управления
Устойчивость будем исследовать по критерию Гурвица. Коэффициенты получим из характеристического уравнения передаточной функции замкнутой системы.
![]()

Составляем главный определитель Гурвица. По главной диагонали располагаем коэффициенты а1 – а5, под ними коэффициенты меньшего порядка, а над ними коэффициенты более высокого порядка.

Далее составляются и считаются определители 1-5 порядков
![]()
![]()
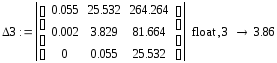
Как видно из расчетов все определители Гурвица положительные, следовательно, исследуемая система устойчива.
2.3. Определение запасов устойчивости по фазе и амплитуде.
Для определения запасов устойчивости по фазе и амплитуде воспользуемся графиком АФЧХ разомкнутой системы (рис. 2).
Как видно из графика запас устойчивости по амплитуде равен 1, т.к. кривая не пересекает действительную ось на участке от –1 до 0.
Чтобы определить запас устойчивости по фазе проведем на графике единичную окружность. Затем из начала координат проведем прямую в точку пересечения единичной окружности с кривой АФЧХ. Координаты этой точки (-0,74;-0,68). Отсюда можно найти коэффициент наклона прямой.
![]()
Запас устойчивости по фазе определится как
![]()
2.4. Построение переходного процесса и АЧХ
Для оценки качества управления необходимо знать ее переходный процесс (прямые оценки) и частотную характеристику (косвенные оценки).
Переходный процесс в системе будет равен
![]()
Обратное преобразование Лапласа:

Переходная функция h(t) будет равна

Кривая переходного процесса изображена на рисунке 4.
АЧХ строится по следующей формуле:
![]()
График АЧХ изображен на рисунке 5.
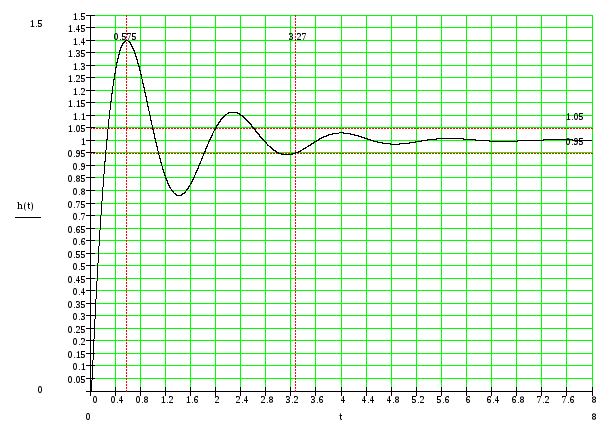
Рис. 4. Переходный процесс в системе
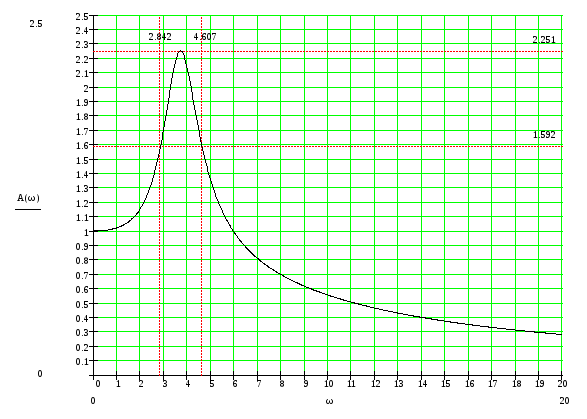
Рис. 5. АЧХ замкнутой системы
2.5. Анализ качества управления
Прямые оценки качества по переходному процессу (рис. 4)
Время регулирования – интервал времени, за который регулируемая величина достигает установившегося значения с заданной точностью ( = 5%). По переходному процессу данной системы время регулирования:
![]()
Перерегулирование – максимальное значение отклонения от установившегося значения, выражающаяся в процентах.
![]()
Такое значение перерегулирования считается нормальным.
Время достижения максимального значения – характеризует качество системы.
![]()
Время нарастания – время, за которое регулируемая величина впервые достигает установившегося значения
![]()
Декремент затухания (находится только для колебательных процессов) – характеризует качество управления, находится как отношение двух соседних перерегулирований
![]()
Косвенные оценки качества по АЧХ замкнутой системы (рис. 5)
Колебательность – отношение максимального значения АЧХ к начальному.
![]()
Резонансная частота – частота, при которой АЧХ максимальна
![]()
Частота среза – частота, при которой АЧХ равно 1, чем она выше, тем выше быстродействие системы.
![]()
Полоса пропускания – интервал частот в системе, для которого 0,707Аmax()>А()
![]()
Анализируя значения показателей качества можно сделать вывод, что качество управления в системе является удовлетворительным и в дополнительном улучшении не нуждается.
2.6. Подбор реальной САУ по заданной структурной схеме
Задана структурная схема

На основе данной структурной можно составить систему автоматического регулирования уровня жидкости в резервуаре.
Структурная схема такой системы приведена ниже
ДУ ПИД У Д Р Резервуар













КУ ДУ




Уровень жидкости воспринимается датчиком уровня (ДУ). Он выдает напряжение пропорциональное величине рассогласования, которое подается в пропорционально-интегрально-дифференциальный (ПИД) регулятор, который вырабатывает управляющее воздействие. Оно поступает на усилитель (У) и далее на двигатель (Д) постоянного тока, который связан с редуктором (Р). Через редуктор вращение двигателя передается на впускное устройство резервуара (клапан), отвечающее за поступление жидкости в резервуар. В обратную связь включены датчик уровня и корректирующее устройство (КУ).
Функциональная схема САР уровня жидкости приведена на рис. 7.
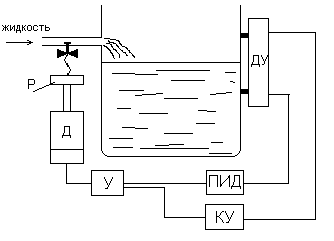
Рис. 7. Функциональная схема САР уровня жидкости
3. АНАЛИЗ НЕЛИНЕЙНОЙ СИСТЕМЫ
3.1. Построение фазового портрета
Найдем передаточную функцию линейной части системы

![]()
![]()
![]()
В качестве нелинейного элемента в системе используется трехпозиционное реле со статической характеристикой рис. 7.

Рис. 7. Статическая характеристика нелинейного элемента.
Из статической характеристики следует:
( х)
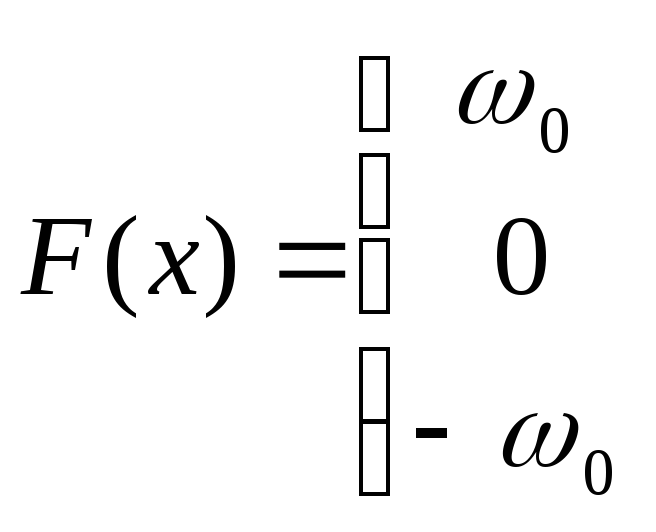
![]()

Получим систему состоящую из трех уравнений:

Решая эти уравнения по отдельности получим решения описывающие различные участки фазовой траектории x = f(V)

![]()
Переключение этих уравнений будет происходить по двум осям: -b и b.
В области слева от –b будет работать уравнение (3), от –b до b – уравнение (2), и , соответственно, справа от b – уравнение (1).
Для упрощения построения графика фазового портрета преобразуем уравнение (2) в следующий вид.
![]()
Сначала необходимо вывести систему в какую-либо точку М0(х0,V0). Пусть это будет точка с координатами (-1,1; 0). Эта область находится слева от –b, следовательно работает уравнение (3).

Конечные координаты первой части будут являться начальными для следующей, причем координата х будет принимать только два значения: -b и b (-1,042 и 1,042).
2. М1(-b; 0,875)
3. М2(b; 0,74)

4. М3(b; -0,73)

5. М4(-b; -0,595)

6. М5(-b; 0,59)
7. М6(b; 0,455)

8. М7(b; -0,445)
9. М8(-b; -0,31)

10. М9(-b; 0,31)
11. М10(b; 0,175)

12. М11(b; -0,175)
13. М12(-b; -0,04)

14. М13(-b; 0,04)
Получившийся график фазовой траектории изображен на рисунке 8.

Рис. 8. Фазовый портрет нелинейной системы управления.
3.2. Анализ устойчивости СУ
По построенному фазовому портрету хорошо видно, что нелинейная система устойчива, т.к. фазовая траектория при выводе ее в точку М0 приближается к началу координат. В последствии фазовая линия пересечет ось V на отрезке (–b, b) соответствующем зоне нечувствительности. Система не подвержена автоколебаниям.
Отсюда можно сделать вывод, что качество управления в данной системе является удовлетворительным и в дополнительной коррекции не нуждается.
3.3. Подбор реальной САУ по заданной структурной схеме.
Задана схема

На основе данной схемы можно составить автоматический релейный регулятор давления, функциональная схема которого приведена на рисунке 9.
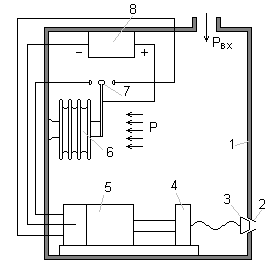
Рис. 9. Автоматический релейный регулятор давления:
Давление Р в помещении воспринимается сильфоном 6, который при изменении величины Р относительно нормального на некоторую величину, соответствующую порогу срабатывания контактного устройства 7, перемещает его средний контакт. При замыкании контактов включается электродвигатель 5, который с помощью червячного редуктора 4 перемещает заслонку 3. Последняя изменяет сечение канала 2; через него стравливается избыточное давление. Реверс электродвигателя 5 осуществляется контактным устройством 7, подключающим электродвигатель к разным полюсам источника питания 8.
Объектом регулирования в этой схеме является давление в помещении.
Структурная схема такого регулятора давления приведена ниже.
















4. СПИСОК ЛИТЕРАТУРЫ
Солодовников В.В. Основы теории и элементы систем автоматического регулирования. – М.: Машиностроение. 1985.
Топчеев. Атлас для проектирования систем управления.