

1. Преобразование нелинейной системы
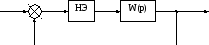
Структурная схема нелинейной системы управления представлена на рисунке 7. Для построения фазового портрета структурную схему преобразуем так, чтобы нелинейный элемент и линейная часть были соединены последовательно.
W4(p)
W5(p)
W6(p)
W8
W1(p)
НЭ
















- -
W7(p)


W2

Рис. 7 Структурная схема нелинейной системы управления
Разомкнем систему перед нелинейным элементом, перенося на новый вход системы регулирующее воздействие. Получим следующую структурную схему (рисунок 8):
НЭ
W5(p)
W6(p)
W8
W1(p)
W2
W4(p)
















 -
-
-W7(p)



Рис. 8 Эквивалентная структурная схема нелинейной системы
Преобразуем структурную схему. Получим схему, представленную на рисунке 9.
 u-x
xi
x
u-x
xi
x
Рис. 9 Преобразованная структурная схема нелинейной системы
Передаточная функция линейной части:
W(p) = W5(p)W6(p)(W8(p)W1(p)W2(p) – W7(p))W4(p);
W![]()
![]()
![]() (p)
= ·3·(2· ·1 – 2)·0,2
= .
(p)
= ·3·(2· ·1 – 2)·0,2
= .
Избавимся от многочлена в числителе. Для этого разделим числитель и знаменатель на (-3р+1):
W![]() (p)
= .
(p)
= .
![]() Преобразуем:
Преобразуем:
W(p) = .
2. Построение фазового портрета
![]() По
определению передаточной функции:
По
определению передаточной функции:
W(p) = , следовательно X = W(p)·Xi;
p(0.083p + 1)X = -5·Xi;
p(0.083p + 1)X = -5·F(u – X).
![]() Будем
считать, что на вход системы подано
постоянное воздействие u
= const,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения:
Будем
считать, что на вход системы подано
постоянное воздействие u
= const,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения:
x![]()
![]() = X – u, px = = y;
= X – u, px = = y;
p2x = = .
 C
учетом этого получим следующую систему
уравнений:
C
учетом этого получим следующую систему
уравнений:
 (1)
(1)
=>
(2)
![]()
![]() Разделив
уравнение (1) на (2) и исключив таким
образом время, получим дифференциальное
уравнение фазовых траекторий:
Разделив
уравнение (1) на (2) и исключив таким
образом время, получим дифференциальное
уравнение фазовых траекторий:
0,083· = 5 - 1.
Решение данного уравнения будет строится исходя из заданной нелинейности. В данном случае нелинейной частью системы является трехпозиционное реле.
Статическая характеристика реле:
 5
y
5
y
-2
2 x
-5
Рис. 10 Статическая характеристика реле
 5, при х>2
5, при х>2
F(x) = 0, при -2 ≤ x ≤ 2; (3)
-5, при x<-2
В соответствии с системой (3) запишем уравнение, с учетом того, что функция является нечетной, т. е. симметрична относительно начала координат:
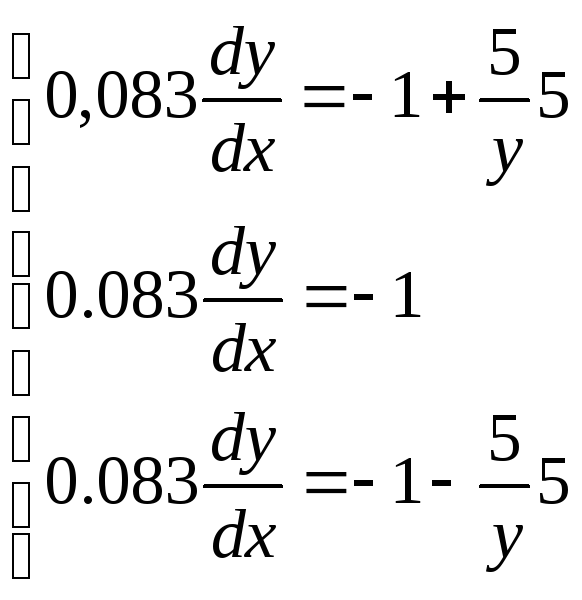
F(x) =
Пусть в начальный момент времени система выведена в точку М0 с координатами (x0; y0). Проинтегрируем вышеприведенное выражение от x0 до x и от y0 до y.
Найдем решение каждого уравнения:
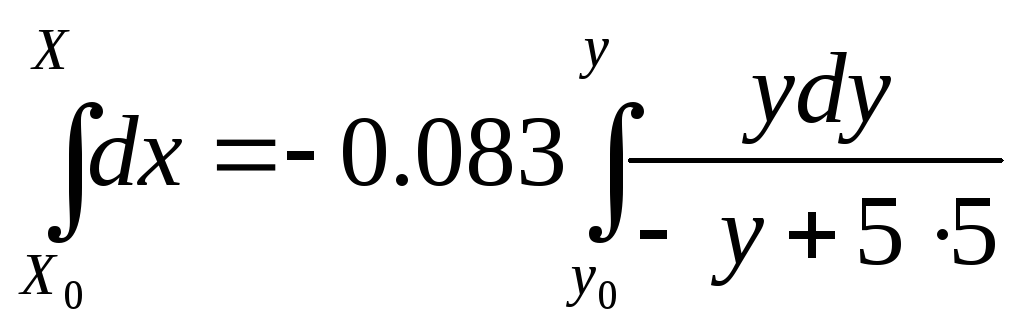
1) ,
п![]()
![]() олучим
олучим
x = x0 – 0.083[y – y0 - 5·5·ln + 5·5·ln ].
2) 0,083·dy = - dx,
0.083(y – y0) = - (x – x0),
x![]() = x0
– 0.083[y
– y0]
– отрезок прямой на интервале -2 ≤ x
≤ 2.
= x0
– 0.083[y
– y0]
– отрезок прямой на интервале -2 ≤ x
≤ 2.
3![]()
![]() )
0.083 = dx.
)
0.083 = dx.
x = x0 – 0.083[y – y0 + 5·5·ln - 5·5·ln ].
Задаваясь различными значениями «y» построим фазовый портрет системы. При этом выведем систему в произвольную точку (-2,7; 0).
Первая кривая при х < - 2:
![]()
![]()
![]()
![]()
Вторая кривая
при 2-<х<2:
Третья кривая при х>2:
![]()
![]()
![]()
![]()
Четвертая кривая при 2-<х<2:
Пятая кривая при х < - 2:
![]()
![]()
![]()
![]()
Шестая кривая 2-<х<2:
Построим фазовый портрет.
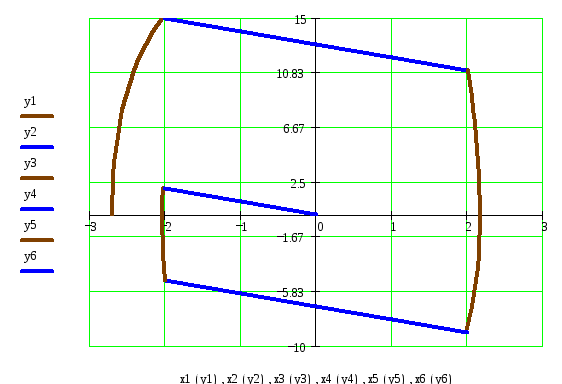
График № 7 Фазовый портрет нелинейной системы управления
По полученному фазовому портрету проводим анализ системы. Последнее уравнение при y = 0 обращается в x = 0, т. е. последняя составляющая графика пересекает ось y на отрезке-2 < x < 2. Закрутка происходит в начало координат. Следовательно система является устойчивой. Качество управления, о котором можно судить по виду фазового портрета является удовлетворительным и не требует дополнительной коррекции.
ЗАКЛЮЧЕНИЕ
В ходе проделанной курсовой работы было проведено исследование системы регулирования уровня жидкости в емкости. Сперва система исследовалась как линейная и было определено, что линейная система устойчива с большим запасом устойчивости по амплитуде. Запас устойчивости по фазе бесконечен. По проведенным прямым и косвенным оценкам качества регулирования можно сделать вывод, что качество управления линейной системы достаточно высокое. При исследование системы с нелинейным звеном по фазовому портрету было определено, что нелинейная система также является устойчивой и работоспособной.
Список литературы
1. Теория автоматического управления/ Под ред. А. В. Нетушила. – М.:Высшая школа, 1977. – 519 с: ил.
2. Основы автоматического регулирования/ Под ред. В. С. Пугачева. – М.:Наука, 1974. – 720 с.: ил.
3. Основы теории автоматического регулирования. Учебник для машиностроительных вузов/ В. И. Крутов, Ф. М. Данилов, П. К. Кузьмин и др.:Под ред. В. И. Крутова. –2-е изд., перераб. и доп. – М.:Машиностроение, 1984, - 368 с,: ил.
4. Самоучитель MathCad 11 Кирьянов Д. В. – СПб.: БХВм – Петербург, 2003. – 560 с.