

САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСТИТЕТ
Балаковский институт техники, технологии и управления
Факультет инженерно-строительный
Кафедра Управление и информатика в технических системах
Курсовая работа
по дисциплине
Теория автоматического управления анализ систем автоматического управления
Выполнил студент группы УИТ – 41
Печавин А. В.
Проверила кандидат технических наук
Скоробогатова Т. Н.
« » 2004
2004
СОДЕРЖАНИЕ
Задание 3
Первая часть
1. Описание выбранной линейной системы автоматического
управления 4
2. Составление структурной схемы выбранной системы по
принципиальной функциональной 5
3. Определение передаточных функций элементов структурной схемы 7
4. Преобразование структурной схемы и расчет передаточной
функции для замкнутой и разомкнутой систем 8
Вторая часть
1. Определение устойчивости системы по критерию Гурвица и по
годографу Михайлова 10
2. Определение переходной и импульсной функций, построение
переходного процесса. Определение прямых оценок качества
системы 12
3. Построение частотных характеристик системы. Определение
косвенных оценок качества системы 14
4. Построение логарифмических частотных характеристик
системы управления, оценка запасов устойчивости 15
Третья часть
1. Преобразование нелинейной системы 18
2. Построение фазового портрета 19
Заключение 23
Список литературы 24
ЗАДАНИЕ
Первая часть:
1. Выбрать для исследования линейную систему автоматического управления;
2. По принципиальной функциональной схеме составить структурную;
3. Определить передаточные функции элементов структурной схемы;
4. Преобразовать структурную схему и рассчитать передаточные функции для замкнутой и разомкнутой систем.
Вторая часть:
1. По полученной передаточной функции рассчитать устойчивость системы;
2. Для исследуемой системы автоматического управления определить переходную и импульсные функции, построить переходный процесс;
3. Построить частотные характеристики системы;
4. Проанализировать качество управления системы (определить прямые и косвенные оценки);
5. Построить логарифмические частотные характеристики системы управления, оценить запасы устойчивости.
Третья часть:
1. Ввести в исследуемую линейную систему автоматического управления нелинейный элемент, преобразовать полученную нелинейную систему;
2. Провести линеаризацию нелинейной системы;
3. Построить фазовый портрет;
4. Заключение (сравнить характеристики линейной и нелинейной систем автоматического управления).
ПЕРВАЯ ЧАСТЬ
1. Описание выбранной линейной системы автоматического управления
В данной работе для исследования мною выбрана система автоматического регулирования уровня жидкости в емкости с использование буйкового уровнемера и пневмосилового преобразователя.


 14
14
РАТМ
6 12 13
5 10,11 РПИТ
4 F l1 7 16
FП
15

 3
8
Пневмосиловой
3
8
Пневмосиловой
преобразователь
1
2 Fр
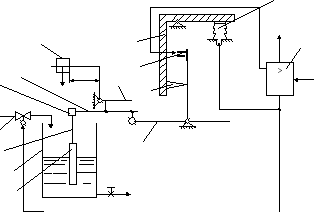
Рис. 1 Принципиальная схема автоматического регулирования уровня
1 – технологическая емкость;
2 – буек;
3 – соединительный шток;
4 – ножевая опора (призма);
5,7 – передаточные рычаги;
6 – противовес;
8 – Т-образный рычаг;
10, 11 – узел «сопло-заслонка»;
12 – Г-образный рычаг;
13 – пневмоусилитель;
14 – сильфон обратной связи;
15 – регулирующий клапан;
16 – корректор
Принцип действия основан на изменении силы Архимеда, действующую на буек 2, при изменении уровня жидкости. При изменении уровня в емкости 1 буек 2 не перемещается вместе с уровнем, а только создает силу рассогласования. При увеличении уровня жидкости начинает увеличиваться сила Архимеда, которая нарушает равновесие между моментами буйка 2 и противовеса 6. Это рассогласование действует на Т-образный рычаг и в результате заслонка 10 пневмосилового преобразователя перемещается. Принцип действия пневмосилового преобразователя основан на силовой компенсации моментов, развиваемых измерительным блоком и блоком обратной связи. Он предназначен для преобразования входного параметра (перемещение заслонки) в пневматический сигнал дистанционной передачи (20 … 100 кПа). Возникший в линии сопла сигнал управляет давлением, поступающим с пневмоусилителя 13 в сильфон обратной связи 14. Сигнал, поступающий в сильфон 14, одновременно является выходным сигналом пневмосилового преобразователя (20 … 100 кПа). Сигнал 20 … 100 кПа поступает на мембранный исполнительный механизм регулирующего клапана 15. Клапан, изменяя проходное сечение трубопровода подачи жидкости, регулирует уровень в емкости.
2. Составление структурной схемы выбранной системы по принципиальной функциональной
Определим объект регулирования и действующие на него факторы.
Объект регулирования (ОР) – технологическая емкость 1, в которой происходит регулирование уровня жидкости;
Регулируемая величина X(t) – уровень жидкости;
Возмущающее воздействие f(t) – изменение расхода жидкости;
Управляющее воздействие Q(t) – подача жидкости в емкость для восстановления заданного уровня.
Функциональная схема ОР и сигналы, действующие на него, показаны на рисунке 2.
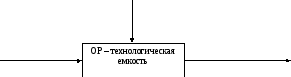 F(t)
– изменение расхода
F(t)
– изменение расхода
жидкости
Q(t) – подача жидкости
в емкость X(t) – уровень жидкости
Рис. 2 Функциональная схема ОР и сигналы, воздействующие на него
Определим элементы функциональной схемы.
Исполнительное устройство (ИУ) – регулирующий клапан 15, от которого зависит количество поданной жидкости в технологическую емкость 1;
Датчик (Д) – буек 2, который служит для измерения регулируемой величины (уровня жидкости) и преобразования ее в силу, действующую на Т-образный рычаг 8;
Задающее устройство (ЗУ) – заданное положение противовеса 6;
Выходной сигнал от ЗУ – момент М, который приложен к рычагу 5. М = F·l1, где F – сила тяжести противовеса 6; l1 – плечо силы F;
Выходной сигнал от датчика – момент силы Архимеды МА, который действует на рычаг 5. МА = FА·l2, где FА – сила Архимеда, l2 – плечо силы FА;
Устройство сравнения – рычаг 5.
Работа устройства сравнения 5 заключается в сравнении двух сигналов от Д и ЗУ (М и МА). В результате, чем меньше уровень жидкости, тем меньше момент МА, тем выше поднимается правая часть рычага 5. В итоге, тем больше будет поступать жидкости через клапан 15 в емкость1. Выходной сигнал от устройства сравнения ΔМ = МА – М.
Составим функциональную схему регулирования уровня жидкости в емкости, которая показана на рисунке 3.
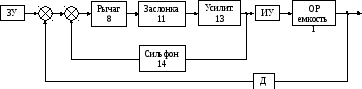
МА ΔМ ΔМ’ S ΔP P S L
M MC P
L
Рис. 3 Структурная схема регулирования уровня жидкости в емкости