

1 Техническое задание
Рисунок нелинейной САУ приведена на рисунке 14.
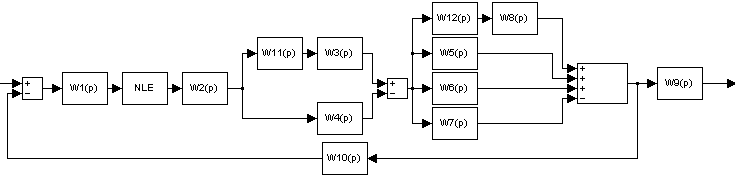
Рисунок 14
Где: W1(p)=38;
W2(p)=![]() ;
W3(p)=0.74;
W4(p)=0.74;
W5(p)=
;
W3(p)=0.74;
W4(p)=0.74;
W5(p)=![]() ;
W6(p)=
;
W6(p)=![]() ;
;
W7(p)=![]() ;
W8(p)=
;
W8(p)=![]() ;
W9(p)=16.3;
W10(p)=
;
W9(p)=16.3;
W10(p)=![]() ;
W11(p)=2;
W12(p)=p.
;
W11(p)=2;
W12(p)=p.
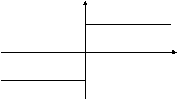
График, описывающий нелинейный элемент NLE приведен на рис. 15
 y
y
10
0
x
-10
Рисунок 15
2 Упрощение структурной схемы сау
Выделим линейный и нелинейный элемент, приведем систему к следующему виду:

Рисунок 16
Обозначение: W13(p)=W11(p)*W3(p)-W4(p); W14(p)=W12(p)*W8(p)+W5(p)+W6(p)-W7(p)
Продолжим упрощение, разделяя линейную и нелинейную части.
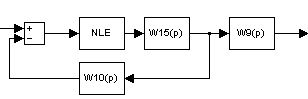
Рисунок 17
Обозначение: W15(p)=W1(p)*W2(p)*W13(p)*W14(p)
П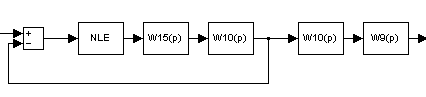 риведем
эту систему к виду:
риведем
эту систему к виду:
Рисунок 18
С группируем
звенья:
группируем
звенья:
u u-x
x1 x
Рисунок 19
Обозначение: W16(p)=W15(p)*W10(p)=W1(p)*W2(p)*(W11(p)*W3(p)-W4(p))*
*( W12(p)*W8(p)+W5(p)+W6(p)-W7(p))*W10(p)
Передаточная функция линейной части запишется в виде
![]()
3 Построение фазового портрета
Передаточная
функция есть
![]() или
или
![]() .
Получим:
.
Получим:
![]()
Приведем к виду:
(![]() )*x=
(27409961.31*p+2958288.50)*x1
)*x=
(27409961.31*p+2958288.50)*x1
Введем замену
X=x-u;
![]() ;
px=y;
;
px=y;
Получим систему дифференциальных уравнений:

Поделим первое уравнение системы на второе:

Заметим, что F(x) принимает некоторое постоянное значение, т.е. производная равна 0.
![]()
Приведем дифференциальное уравнение к виду:
![]()
Разделим на 2 участка:

Проинтегрируем на промежутке (x; x0) и (y; y0)
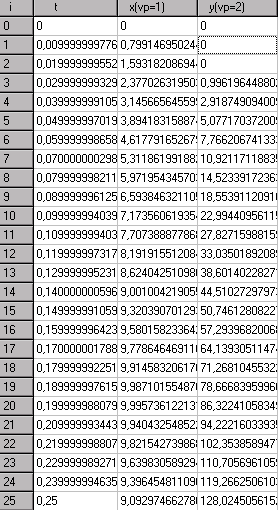
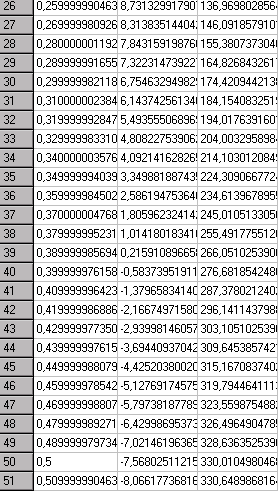
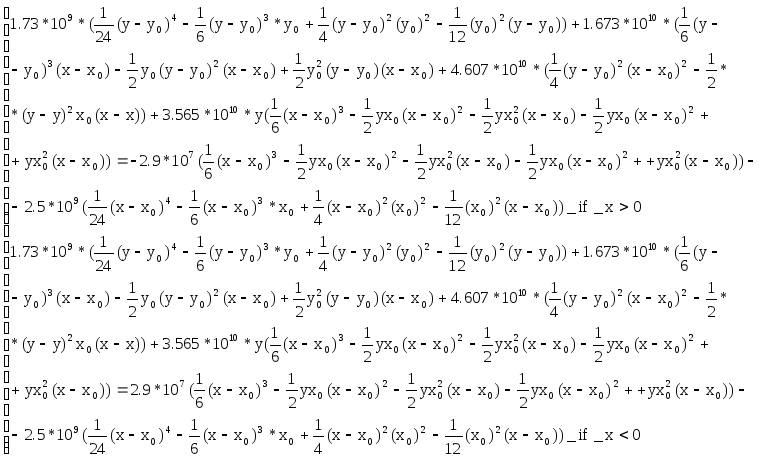 Подставляя
значения статической характеристики,
составим систему уравнений для построения
фазового портрета. Задаваясь различными
значениями "у" построим фазовый
портрет системы. Построение происходило
в специализированной программе SamSim.
Подставляя
значения статической характеристики,
составим систему уравнений для построения
фазового портрета. Задаваясь различными
значениями "у" построим фазовый
портрет системы. Построение происходило
в специализированной программе SamSim.

Рисунок 20
Вывод: согласно рисунку 20 система неустойчива, ввиду того, что кривая отклоняется от начала координат. При удалении от начала координат амплитуда колебаний увеличивается, но незначительно. Частота колебаний увеличивается также незначительно. Таким образом, система управления неустойчива и не может быть получена устойчивой, без внесения дополнительных звеньев.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1 Основы автоматического регулирования/Под ред. В.С. Пугачева. – М.: Наука, 1974. – 720 с.: ил.
2 Теория автоматического управления/Под ред. А. В. Нетушила.– М.: Высшая школа, 1976. – 400 с.: ил.
3 Основы теории автоматического регулирования/А.А. Воронов и др. – М.: Высшая школа, 1977. – 519 с.: ил.
4 Автоматические приборы и регуляторы/ Кошарский Б.Д., Бек В.А., и др. – М.: Машиностроение, 1964. – 704 с.: ил.
5 Автоматизация производства и промышленная электроника/Берг А.И., Трапезников В.А. – М.: Советская энциклопедия, 1962. – 544 с.: ил.