

-
Анализ качества управления су.
По полученному переходному процессу определяем следующие показатели качества управления СУ.
-
Установившееся значение
По графику hуст![]() 1
1
![]()
-
Время регулирования
tp=2,45 с.
-
Перерегулирование
![]()
![]()
-
Декремент затухания
![]()
![]()
![]()
-
Время достижения первого максимума
tmax=0,239 c.
-
Время нарастания
tн=0,125с.
-
Число колебаний за время регулирования.
n=5.
-
Период колебаний
Т=0,48 с.
-
Частота колебаний
![]()
С учетом этих показателей можно сделать вывод, что качество управления СУ недостаточно хорошее и требует дополнительной коррекции, так как перерегулирование и время регулирования слишком большие, а декремент затухания не достаточно велик. Время регулирования можно уменьшить за счет увеличения коэффициента усиления (что также положительно повлияет на декремент затухания, число колебаний и перерегулирование), то есть последовательно со звеном W3(р) включить звено с передаточной функцией W4(p)=100. Время регулирования можно уменьшить, уменьшая постоянную времени Т в звене с передаточной функцией W1(p), но это приведет к увеличению числа колебаний, что отрицательно скажется на параметрах системы. Добиться улучшения переходной характеристики СУ также можно путем введения дополнительных корректирующих звеньев.
2. Анализ нелинейной су
2.1. Построение по заданной структурной схеме су ее фазового портрета..
Для построения фазового портрета упростим структурную схему нелинейной СУ. Для этого сгруппируем все линейные звенья системы и нелинейные.


Рисунок.21 .
Разомкнем систему перед нелинейным элементом, перенося на новый вход системы регулирующее воздействие. Получим следующую структурную схему.


Рисунок.22.
Получаем передаточную функцию линейной части.
![]()
По определению передаточной функции.
![]()
Для нашего случая.

Будем считать, что на вход системы подано
постоянное воздействие
![]() ,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения.
,
тогда перейдем от самих величин к их
отклонениям относительно постоянного
входного воздействия. Введем обозначения.
С учетом этого получим следующую систему уравнений.

Почленно поделим уравнения системы.
![]()
Решим уравнение. Пусть в начальный момент времени система выведена в точку М0 с координатами (х0, у0). Проинтегрируем вышеприведенное выражение от х0 до х и от у0 до у.


Подставляя значения статической характеристики составим систему уравнений для построения фазового портрета.
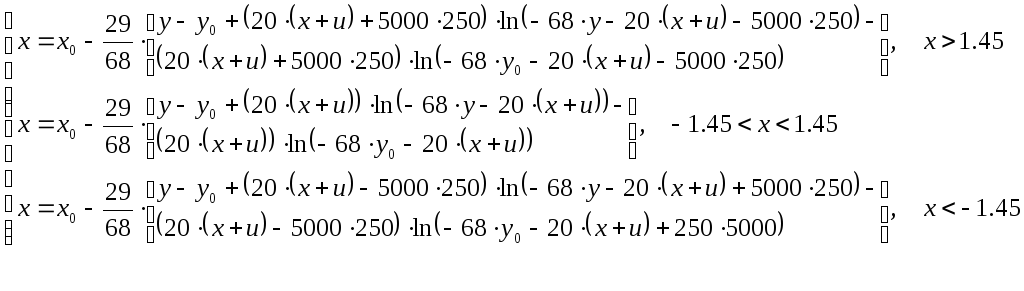 Задаваясь
различными значениями "у" построим
фазовый портрет системы. При этом
выведем систему в точку (-4.2,0).
Задаваясь
различными значениями "у" построим
фазовый портрет системы. При этом
выведем систему в точку (-4.2,0).
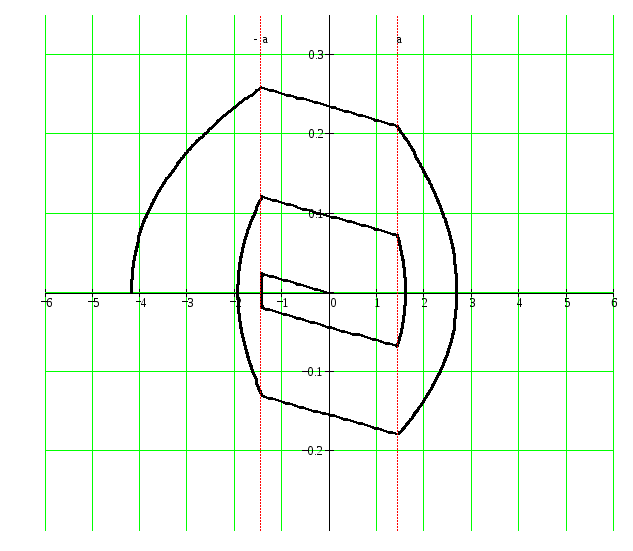
Рисунок.23.
2.2. Анализ и определение устойчивости су
По полученному фазовому портрету проводим анализ устойчивости СУ. При этом видно, что система является устойчивой, т.к. последняя составляющая графика пересекает ось θ на отрезке (-b , b). Далее в системе поддерживаются нулевые отклонения по скорости dθ/dt с блужданием системы по θ в интервале (-b , b). График пересекает отрезок при θ = 0,039. Качество управления СУ, о котором можно судить по виду фазового портрета, является удовлетворительным и не требует дополнительной коррекции.
Список литературы.
1. Дикарева А.А., Мирская М.И. Справочник по радиоэлектронным приборам. М., 1989. 143с.
2. Деккер П., Эстер П. Датчики в автоматизированных системах. // Датчики и системы.1997. N10.с.87-99.
3. Петров М. Системы управления. // Наука и жизнь. 1990. N4. С.13-28.
4. Сорокин П. Вычислительные комплексы. М., 1992. 323с.