

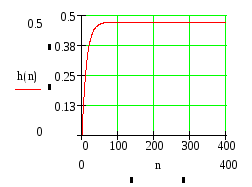
3.3 Построение переходного процесса

![]()
По графику переходного процесса определим прямые оценки качества:
1.
Установившееся значение hуст
= 0,47, т.к.
![]() ,
тогда интервал отклонения в 5% от
установившегося значения будет
соответствовать следующим величинам:
,
тогда интервал отклонения в 5% от
установившегося значения будет
соответствовать следующим величинам:
Δ1 = hуст – 0,025·hуст = 0,482
Δ2 = hуст + 0,025·hуст = 0,458
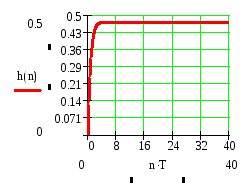
2. Время переходного процесса tП = 2,7 (с)
3. Перерегулирование:
![]()
4. Период колебаний Т = ∞
5. Частота колебаний ω = 0 (рад/с)
6. Колебательность (число колебаний за время колебательного процесса) n = 0
7. Время нарастания регулируемой величины (время, за которое регулируемая величина достигает максимального значения) tH = 8,34 (c)
8. Время первого согласования (время, когда регулируемая величина достигает первый раз своего установившегося значения) t1 = 8,34 (c)
3.4 Полученную z-преобразованную функцию подвергаем ω-преобразованию.


3.5 Далее произведем λ-преобразование полученной функции.

![]()

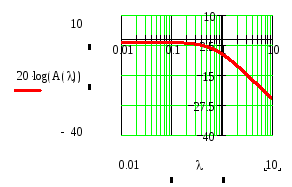
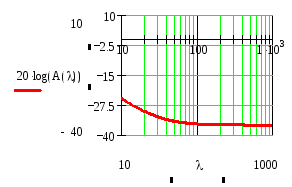
По полученной функции строим ЛАЧХ и ЛФЧХ.
![]()
![]()
![]()
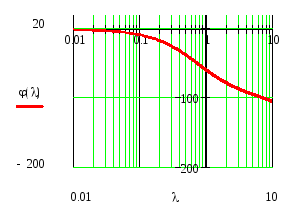
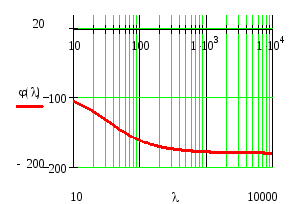
Запасы устойчивости системы по фазе и по амплитуде отсутствуют, то есть, можно сказать, что система находится на границе устойчивости.
Выбор микропроцессора
Из данной системы выбираем наименее инерционное звено:
![]() ,
,
граничная частота которого равна fгр=1/0,26=3,85 Гц. На основании этого выбираем частоту микропроцессораfмп=10fгр=38,5 Гц (Постоянные времени Тмп=0,1Тгр=0,026, где Тгр=0,26 с– минимальная постоянная времени контура исходной системы).
Такой микропроцессор не будет влиять на работу системы в целом, поэтому можно считать, что система остается линейной.
Вывод:В данной курсовой работе я провела анализ предложенной мне системы автоматического управления, нашла переходный процесс и частотные характеристики системы, определила прямые и косвенные оценки качества системы, устойчивость линейной системы; научилась линеаризовывать нелинейный элемент, оценила влияние коэффициента усиления (коэффициент крутизны линеаризованного нелинейного элемента) на систему; рассмотрелаz-, ω -, λ- преобразования в импульсно-непрерывной системе, научилась выбирать частоту микропроцессора дискретной системы.