

1.4. Построим ачх.
![]()
Ведем
замену
![]()
![]()
Выделим мнимую и реальную части:
![]()

![]()


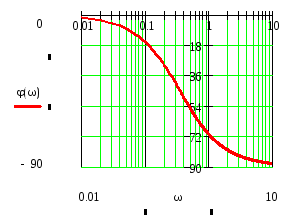
Построим график амплитудно-частотной характеристики

Найдем косвенные оценки качества системы.
1. Колебательность
![]()
![]() ,
тогда
,
тогда![]()
2. Резонансная частота – это частота, при которой амплитуда максимальна.
![]() (рад/с)
(рад/с)
3. Частота среза – это частота, при которой амплитуда равна 1.
![]() (рад/с)
(рад/с)
4. Полоса
пропускания частот – это наилучшее
провождение сигнала через систему или
коридор ограниченный прямой, параллельной
оси
![]() с координатой
с координатой![]() =5,65.
Из точек пересечения данной прямой с
АЧХ опускаем перпендикуляры на ось
=5,65.
Из точек пересечения данной прямой с
АЧХ опускаем перпендикуляры на ось![]() ,
которые и ограничивают полосу пропускания
частот
,
которые и ограничивают полосу пропускания
частот![]() =0,03
(рад/с).
=0,03
(рад/с).
Построим ЛАЧХ и ЛФЧХ.
Для построения ЛАЧХ и ЛФЧХ разомкнем систему, то получим
![]() ,
,
тогда
![]()
![]()
![]()

ωср=1/2,85=0,35


Запас
устойчивости по фазе
![]() ,
а по амплитуде запаса устойчивости нет.
,
а по амплитуде запаса устойчивости нет.
Следовательно, изменение коэффициента усиления данной системы может привести к тому, что система станет неустойчивой, то есть фактически система находится на границе устойчивости.
Часть 2: Нелинейная система.
Дана структурная схема нелинейной САУ:
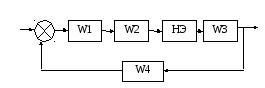
2.1. Анализ нелинейного элемента и преобразование структурной схемы
Нелинейный элемент имеет вид:
-0,6 0,6 А В
Релейные
звенья для снижения аналитических
затрат необходимо вводить в режим
пограничного регулирования. Система
является работоспособной только на
участке АВ релейной характеристики
(так как на остальных участках коэффициент
крутизны будет равен 0). Поэтому для
расчета линеаризуем нелинейный элемент
для этого найдем коэффициент крутизны
![]() ,
который показывает, как входная величина
преобразуется в выходную.
,
который показывает, как входная величина
преобразуется в выходную.
W7(ω)=![]()
Согласно полученному выражению можем преобразовать структурную схему.
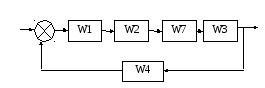
Звенья
![]() соединены
последовательно, следовательно, имеем:
соединены
последовательно, следовательно, имеем:
![]()
Звенья W5(p), W4(p) включены встречно – параллельно (сумматор положительный), следовательно:
![]()
Получили передаточную функцию данной системы:
![]()

2.2 Построение переходного процесса
 -
переходная функция замкнутой системы.
-
переходная функция замкнутой системы.
На вход
подается
![]() -функция
Хевисайда.
-функция
Хевисайда.
Функция, определяющая изменение выходной величины системы при подаче на ее вход единичного ступенчатого воздействия и при нулевых начальных условияхназывается переходной функцией системы и обозначается: h(t).
Построим график переходного процесса системы
![]()
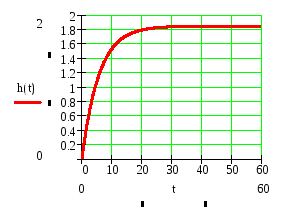
По виду переходной характеристики можно сказать, что данная система устойчива.
По графику переходного процесса определим прямые оценки качества:
1.
Установившееся значение hуст
= 1,8, т.к.
![]() ,
тогда интервал отклонения в 5% от
установившегося значения будет
соответствовать следующим величинам:
,
тогда интервал отклонения в 5% от
установившегося значения будет
соответствовать следующим величинам:
Δ1 = hуст – 0,025·hуст = 1,755
Δ2 = hуст + 0,025·hуст = 1,845
2. Время переходного процесса tП = 17,22 (с)
3. Перерегулирование:
![]()
4. Период колебаний Т = ∞
5. Частота колебаний ω = 0 (рад/с)
6. Колебательность (число колебаний за время колебательного процесса) n = 0
7. Время нарастания регулируемой величины (время, за которое регулируемая величина достигает максимального значения) tH = 28,62 (c)
8. Время первого согласования (время, когда регулируемая величина достигает первый раз своего установившегося значения) t1 = 28,62 (c)